

Propeller discussion in Orlando
 Pliers
Posts: 280
Pliers
Posts: 280
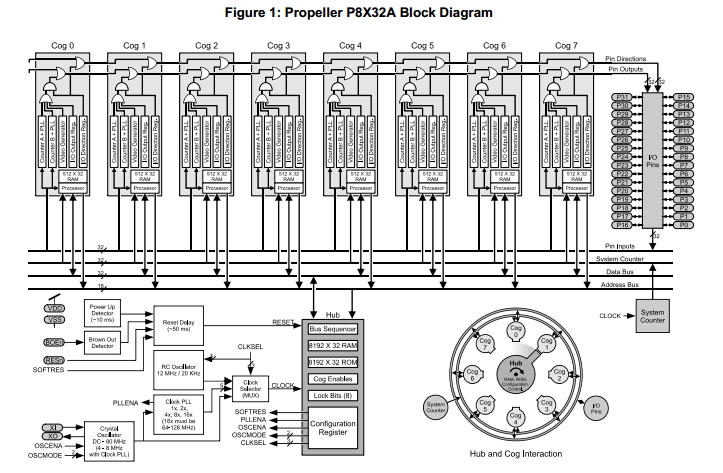
I'm giving a introduction talk to a local robotics club and I need a high resolution picture of the Propeller layout.
Can someone point me towards it?
Thanks.
Can someone point me towards it?
Thanks.
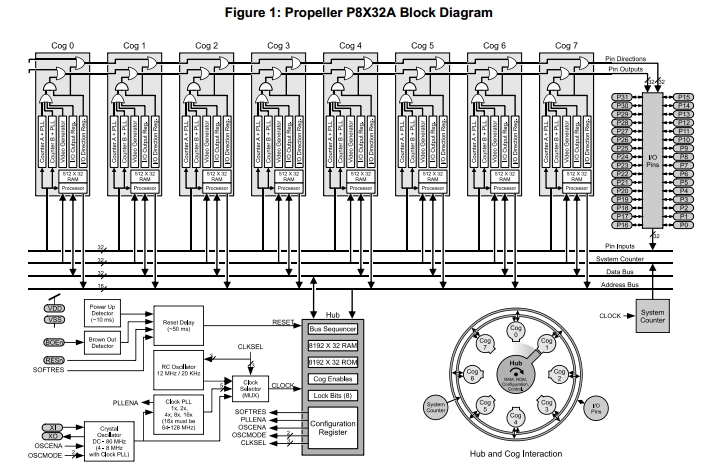
723 x 473 - 213K
Comments
Thanks for the file.
This first talk is an introduction to the propeller, and then I'll be doing a talk each month about various subjects and projects concerning the Propeller. It is all very exciting.
This does sound exciting. Where are you giving these talks and who is your audience?
Having a hi-res image is helpful for presentations, but one with as much small text as that image may be less-than-helpful. Generally, if you want to show an image of that type in a presentation, you'll also want also to show blown-up views of the different parts of the image that enlarge and make the text readable. Here's some examples that you could use (you may want to recreate them if you find a higher resolution version of the original image):
I hope this helps,
dgately
Hey Duane Degn. There is a robot club that meets at a library in downtown Orlando, Florida.
From my observations, the audience has been males ages 25 to 75.
I want to throw in my two cents.
The propeller is somehow special and "unacustomed"
So the introduction could start with something like this:
If you would need three or four fullduplex serial ports all working at 115200 baud,
If you would need two or three SPI-interfaces working independent of each other
additionally creating step/direction signals for four steppermotors which must be synchronised to each other
Which microcontroller offers enough speed and enough hardware-interrupts to catch all dataincoming events
without disturbing the creation of all the stepper-signals which has to be a constant stream of signals with almost no jitter?
An arduino surely not.
Now the propeller can do. Because it has 8 cores to distribute all the work to the eight cores. And as there are 8 cores to do lot's of different things there is no more need
for interrupts.
best regards
Stefan
Hey Peter Jakacki. Thanks for the input.
This is very exciting. I love the propeller, and getting a platform upon which ( is that the correct word(which)?) to speak about it is exhilarating.
Just a side note.
I'm working on a demonstration using one quick start board, a couple of Emic2s and a Veho 360 for each Emic2.
I also have a few Activity boards that will be running demo programs. Probably the VGA video demo, and one running an accelerometer (Memsic 2125 Accelerometer DEMO - TV Graphics).
Thanks guys.
My first learning was from the Propeller Manual Ver 1.0 chapter 3 " Propeller Programming Tutorial".
I see there are few books available for purchase, covering "Programming the Propeller" and there are some online tutorials that are screen shots, but I find them hard to read.
I prefer learning from printed material, but a nice PDF is better than a bunch of screen shots on a WEB page. Am I missing some nice easy to read resource online?
Anyhow...my plan was to point to some nice online resources for beginners, point to the OBEX and then to the forums. Just a quick scurry through the Parallax site.
I use a screen capture software program that plays back like a movie.
This is a not big problem, just a surprise.
The meat of the discussion will come from live programming.
Enough whining, back to work.