

Help finish Tricopter Project $$
 teganburns
Posts: 134
teganburns
Posts: 134
I have lost the battle but not the war...
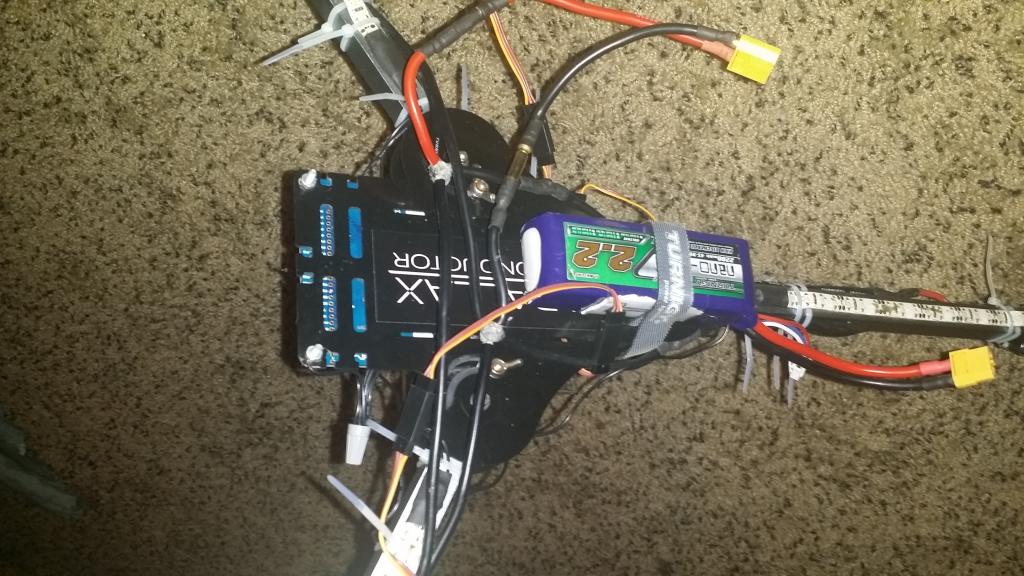
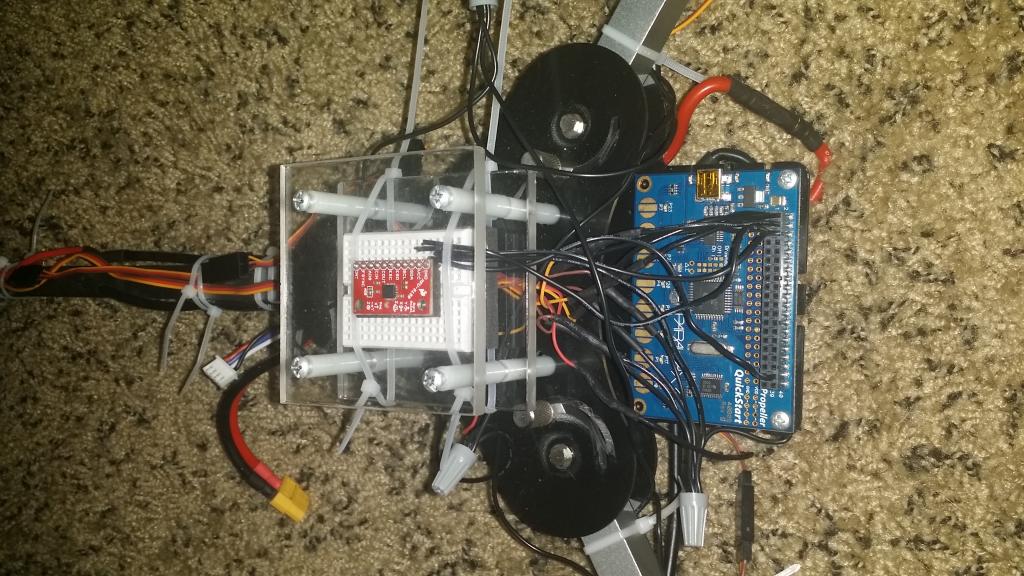
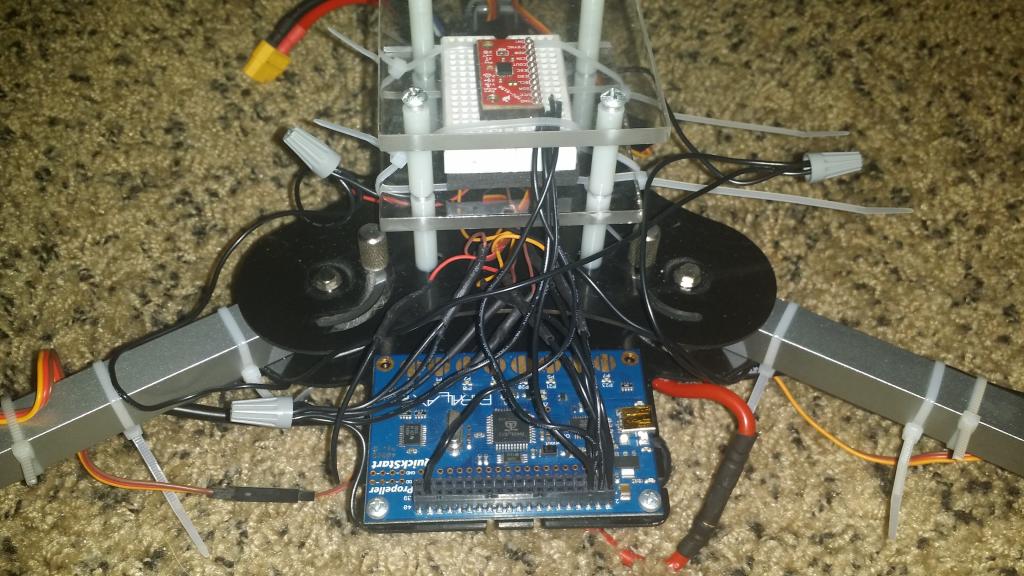
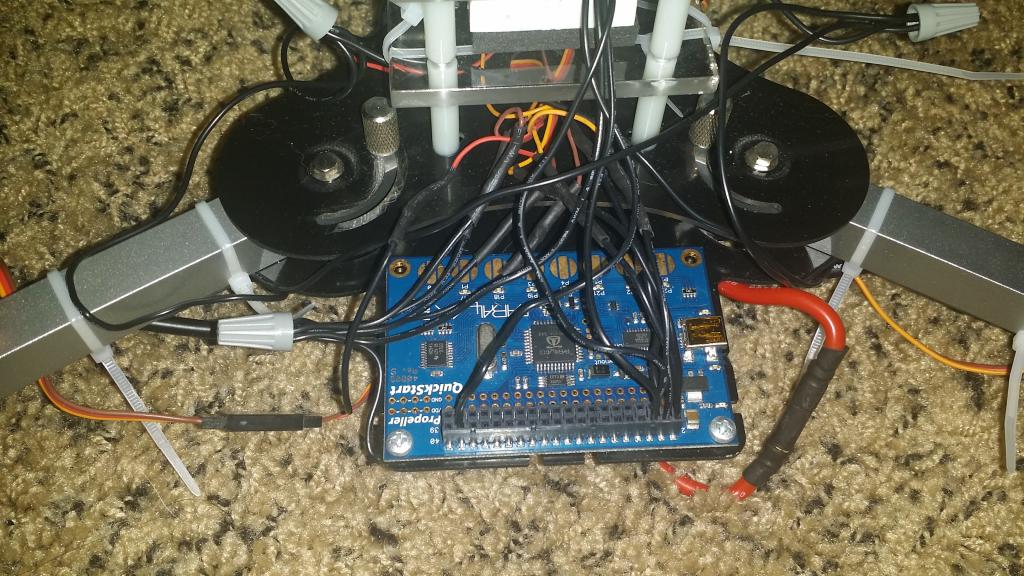
As some of you know I have been working on a project to make an autonomous tricopter for some months over a year. The project has overwhelmed me and is above my math and programming skills. So I'm looking for some one on one help.
I know a lot of you are prophead geniuses and this wouldn't take too much time to finish up. I have attached my code. (given i stopped mid thought, also have to give credit to Jason I used a lot of snippets from his quad code)
If any propheads think you can handle this please PM me.
As some of you know I have been working on a project to make an autonomous tricopter for some months over a year. The project has overwhelmed me and is above my math and programming skills. So I'm looking for some one on one help.
I know a lot of you are prophead geniuses and this wouldn't take too much time to finish up. I have attached my code. (given i stopped mid thought, also have to give credit to Jason I used a lot of snippets from his quad code)
If any propheads think you can handle this please PM me.
spin
32K
1024 x 576 - 115K
1024 x 576 - 130K
1024 x 576 - 117K
1024 x 576 - 138K

1024 x 576 - 123K

1024 x 576 - 114K

1024 x 576 - 106K
Comments
https://code.google.com/p/anzhelka/source/browse/#git%2Fsoftware%2Fspin%2Fsrc
And here's the 19 page math document that outlines how inputs (desired orientation, current orientation, desired altitude, current altitude) are transformed into outputs (motors 1-4 PWM). For a trirotor the math is the same up to the point where it calculates the output based on the vehicle model. For that, you'll have to adjust for the different dynamics of a trirotor.
https://anzhelka.googlecode.com/git/doc/reports/quadrotor_mathematics.pdf
In any case, maybe this provides some inspiration.
You can see it in action with our single motor test stand here:
As this is multirotor-related discussion, I will be requesting that it be moved to the multitrotor sub-forum. Please use the sub-forum for all future multirotor-related (this includes drones, unmanned aircraft) discussion. Thanks for your understanding as we work to make this forum more user friendly.
Cheers,
-Kyle