

Making Flexible Circuit Boards?
 Kirk Fraser
Posts: 364
Kirk Fraser
Posts: 364
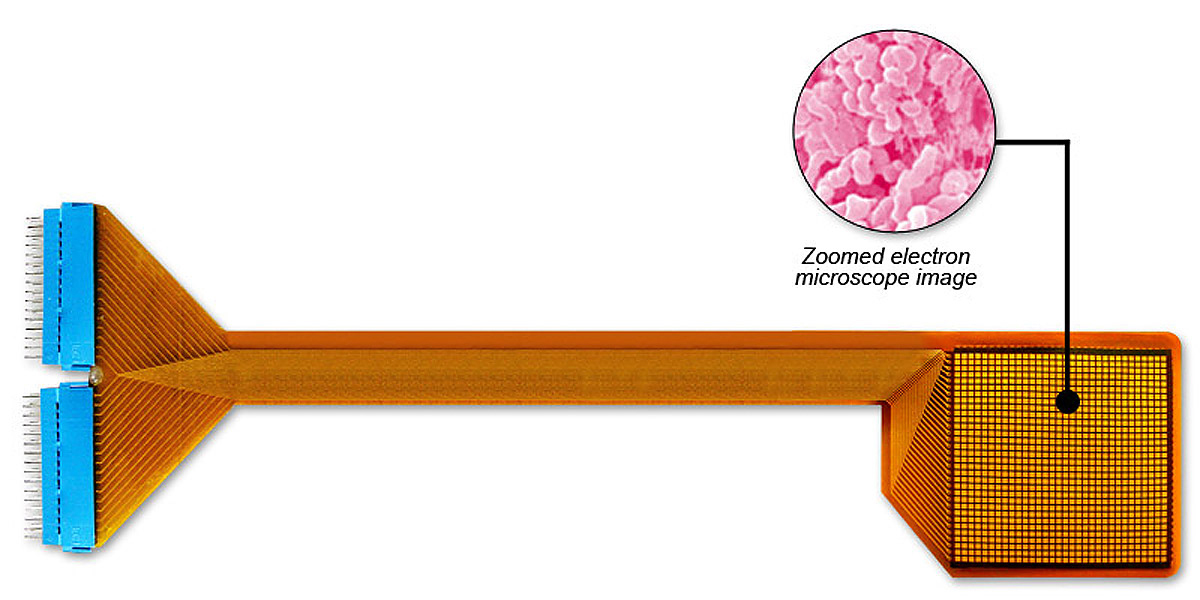
I have seen some sites offering flexible circuit boards. How can one either make one from scratch or specify details like this matrix pressure map sensor built with flexible board technology?
http://www.sensorprod.com/images/tactile-surface-sensor/tactile-surface-sensor2-lg.jpg
Here's a competing sensor. The problem is the vendors sell these for $12,000 and up, far beyond the money I have, just for one and I need several for my humanoid robot. Any suggestions? Or temporary employment to make that kind of money? Thanks.
https://www.youtube.com/watch?v=q6_iZwuK3cU
http://www.sensorprod.com/images/tactile-surface-sensor/tactile-surface-sensor2-lg.jpg
{kind=link}
Here's a competing sensor. The problem is the vendors sell these for $12,000 and up, far beyond the money I have, just for one and I need several for my humanoid robot. Any suggestions? Or temporary employment to make that kind of money? Thanks.
https://www.youtube.com/watch?v=q6_iZwuK3cU
Comments
You may find a PCB house that can make flexible circuit boards for you, they won't be cheap, you will want to order thousands before the price of one becomes economical. They won't be making a pressure sensor for you.
http://www.pulsonix.com/flex.asp
I have it, but I've never tried it.
Here is a UK company that makes them:
http://www.stevenagecircuits.co.uk/
They will be expensive.
https://www.kickstarter.com/projects/1597902824/agic-print-printing-circuit-boards-with-home-print
It will be capable of printing on some types of plasti film according to the creators.
The Kickstarter is over, but it can be preordered on http://agic.cc
($299 for a DIY kit, you supply the printer and they haven't yet said which models work, or $599 for a finished printer)
Or you could get a pen with conductive ink...
May I ask what the application is for? I have had first hand experience with Tekscan and various other pressure sensor vendor while I was in the Prosthetic industry. What I can tell you that they won't is that any kind of bend or curvature can create a reading, so for best results the sensing element must be flat and free from any wrinkles, creases, or bumps (a grain of sand in the wrong place can kill the sensor)
We tried to use the Tekscan sensor to measure real time pressure in the bottom of a prosthetic foot during gait analysis. In clinical trial studies, the sensors held up with mixed results, but in almost ALL cases, long term use was out of the question. We resorted to developing our own, and we also needed a flexible circuit board. In the Early 90's our only option was to ride on the success of others.... right in front of us was a printer with a flexible circuit delivering power to the Print head... So after a little digging we contacted the company that made the flexible ribbon cable and they obliged to making a custom flexible circuit.
To combat the sensors we stayed away from any kind of FSR (Force Sensitive Resistor) since in all cases that we tried, the shear stress involved within a Prosthetic foot would de-laminate the sensors very quickly. We created an inductive sensor, a Coil of wire if you will that was actually designed as part of the flexible circuit. To change the inductance with pressure, the coils were separated with a neoprene type material and a metallic foil mesh on the back side. As the neoprene compressed, the inductance of the coil changed due to the proximity of the metal foil mesh to the coil and a reading was able to be taken. While these sensors weren't without problems, they lasted 10's of times longer (several months) than the FSR sensors we originally used (a few days).
Thank you very much! My application is a humanoid robot described at www.reliablerobots.com for sensing hand and foot contact with the environment. I'm hoping to compete in the DARPA Robotics Challenge next June although my finances may not permit completion by then, I'm still going to work on it until I have a prototype to try to turn into a product. So I'll work on a flexible inductive sensor as your experience proved more long lasting. Thanks also for saving me further efforts in the wrong directions.
Kirk