

EMIC2 With Activity Board

I am brand new to robotics and programming and am trying to get my new ActivityBot to produce sound through an EMIC 2 card and a Veho360 speaker. Not sure if the EMIC is connected properly. I have tried to run several audio programs to test the device, including Emic2_Demo.Spin using the SimpleIDE software. The red and green lights on the Emic2 seem to come on properly when running the program after downloading it to the Propeller board. Any help is appreciated. Is there a step-step tutorial on using the Emic2 on the ActivityBot?
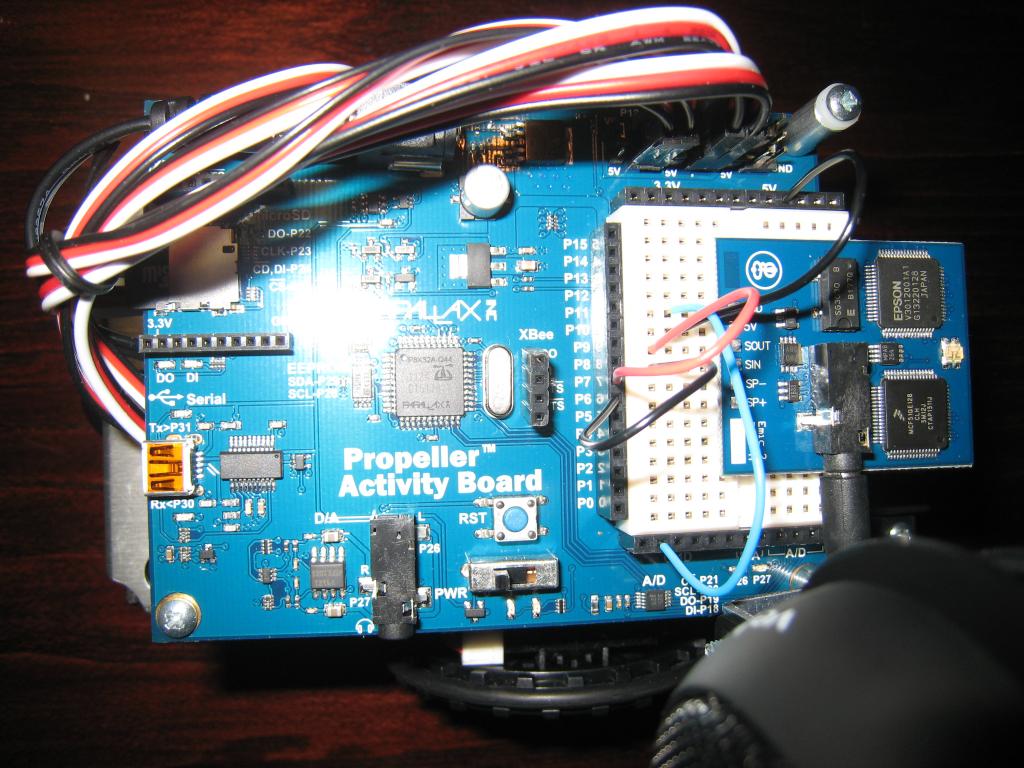
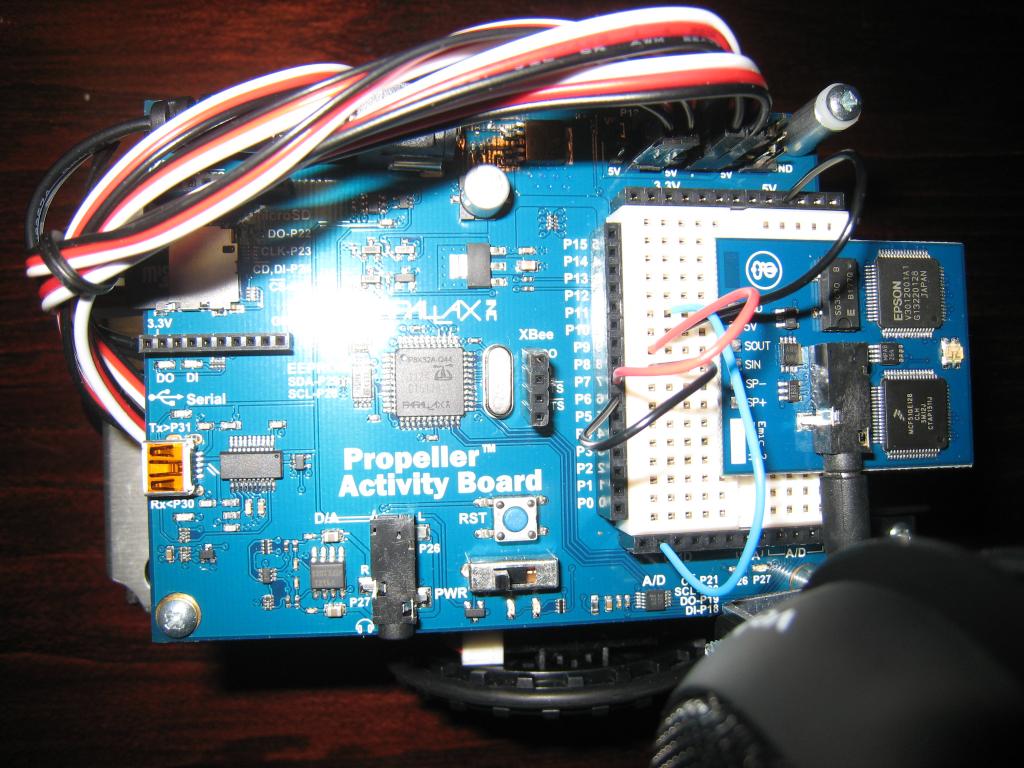
1024 x 768 - 132K
Comments
It would normally be connected to SP- and SP+
EDIT
Looks like you are using the speaker jack.
Have you tested the Veho360 with some other audio device to make sure it's working?
BTW, This is the Propeller 2 forum. Maybe a moderator can move it to the Prop ! forum?
What is displayed in the terminal window?
Have you used your EMIC2 with a different microcontroller? I'm wondering if the baud could have been changed on the EMIC2 when used with a different controller.
I don't use Simple IDE.
Hopefully another forum member can jump in to help.
Are you using Parallax Serial Terminal? And with Spin Code?
I may have to buy an EMIC2 myself.
(The Emic2 is a cool device.)
Somehow it got moved to the Robotics Forum. Is this robotics related?
Regarding the Sonar: we connected the Parallax Servo to P16 and the Ultrasonic Sensor to P17. When we run the Test Ping Distance.c we only get distances of 0. When we plug the Sonar directly into the breadboard we get proper readings. Here are more photos.
Thanks again for any help offered.
It looks like you're using the PING))) Mounting Bracket, though I am unclear on that as you only mentioned a servo, not the bracket. Nonetheless information for building and connecting the mounting bracket are shown here: http://www.parallax.com/sites/default/files/downloads/570-28015-PING-Mounting-Bracket-Documentation-v2.2.pdf
The example uses the BoE-Bot, but on the ActivityBot you can use the same method. You have additional servo mounting headers on the ActivityBot. Likewise there is code for the PING))) for the ActivityBot. So now you're left to adding code to control the servo that the PING))) is mounted to. You can use the servo library functions to do this. It would be done just like moving any standard servo without feedback.
As for getting results of zero from the sensor, I am going to guess that is because the code assumes it is connected to P8 but you're using P16 and perhaps did not make the necessary changes to the code?
Also, we are still seeking help getting our EMIC2 to produce sound.
Thanks,
Jeff