

Robot Calisthenics (aka wiggling HexPi's legs!)
 Bill Henning
Posts: 6,445
Bill Henning
Posts: 6,445
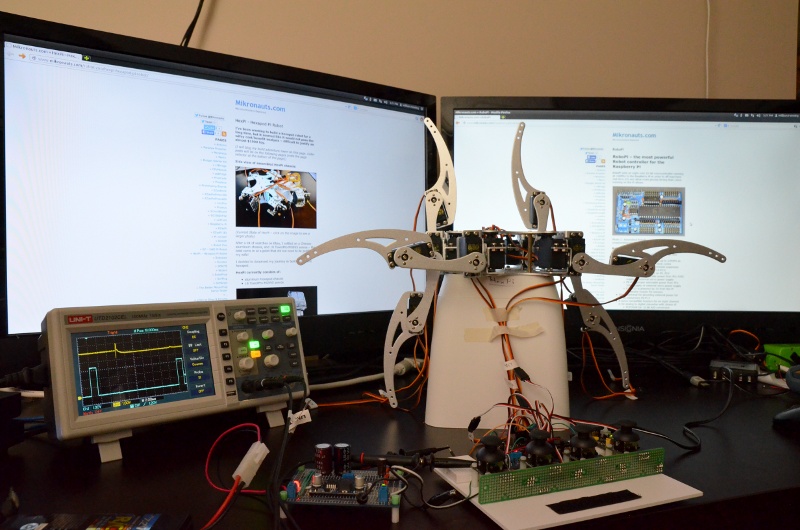
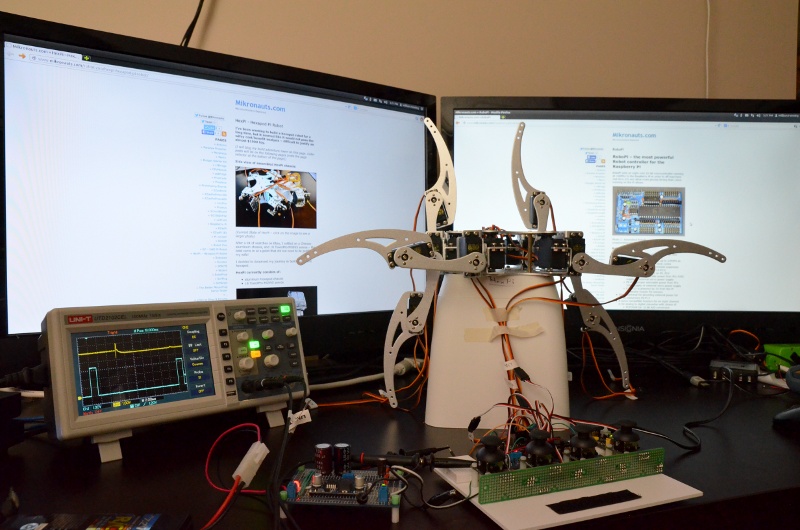
I used TBMST to control two of HexPi's front legs - and I uploaded a video of it to YouTube.
Embedded video at http://www.mikronauts.com/2014/06/11/hexpi-does-calisthenics/
You can see the jitter of the legs in the video, which also shows the servo power on my scope.
Embedded video at http://www.mikronauts.com/2014/06/11/hexpi-does-calisthenics/
You can see the jitter of the legs in the video, which also shows the servo power on my scope.
800 x 530 - 158K
Comments
Yep, HexPi is a fairly large bot... I'll have put a Boe-Bot beside him for reference.
Re/ ankles twitching more... I have two theories
1) knees ended up with better servos
2) ankles are carrying less weight... I'll try adding some weight to them to see if it reduces the twitching... maybe they like having a load?
The power supply I am using right now is limited to 3A, however it is possible to power the P0-7 and P8-15 servo header banks independently, and since I used 24 mil wide power traces on both sides (1oz copper, and copper pour ground) I can supply a lot of current to the servos by using an appropriate external power supply connected to the SV2 & SV3 servo header power selector directly, instead of the screw terminal. RoboPi should be good for >5A per bank.