

Eddie board as stand alone controller.
 Timbotronic
Posts: 7
Timbotronic
Posts: 7
Hello, I'm using the Eddie board without the kinect, a laptop, or RDS4. I do have the base, motors, encoders, ping, batteries and IR sensors. What I'd like to do is make a little autonomous robot. I have the ping sensors controlling an LED when an object is within specified distance. The problem that I'm having is controlling the on-board H-bridges and knowing how to use the encoders. Since I'm not using RDS4, I can't enter the firmware commands serially. So, my question is: How might I control the on-board H-bridges with the setup I have? And, do I need to use the encoders?
I've only just completed the spin tutorials so spin is new to me. I've been told that I might be able to alter the firmware so that instead of the board communicating serially via some monitor, the board could communicate internally with the sensors. Perhaps someone more experienced in spin has made these alterations?
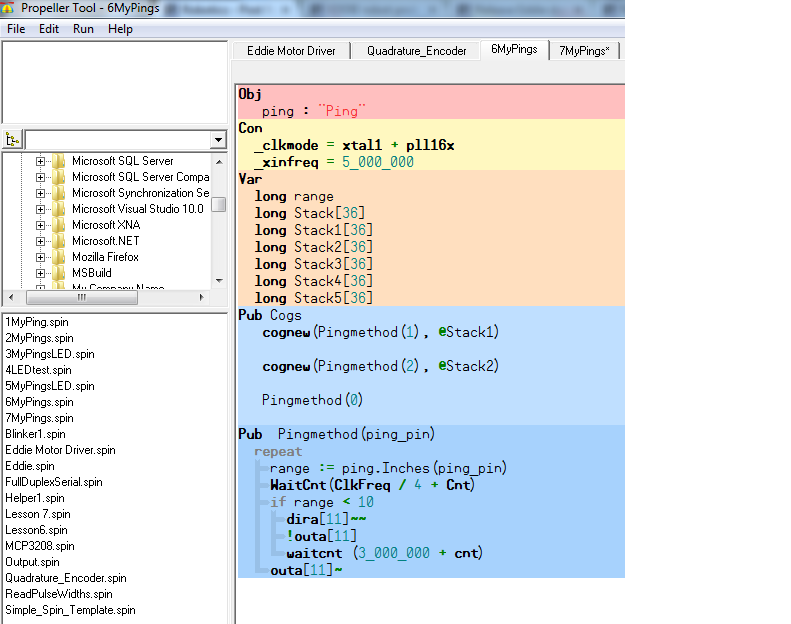
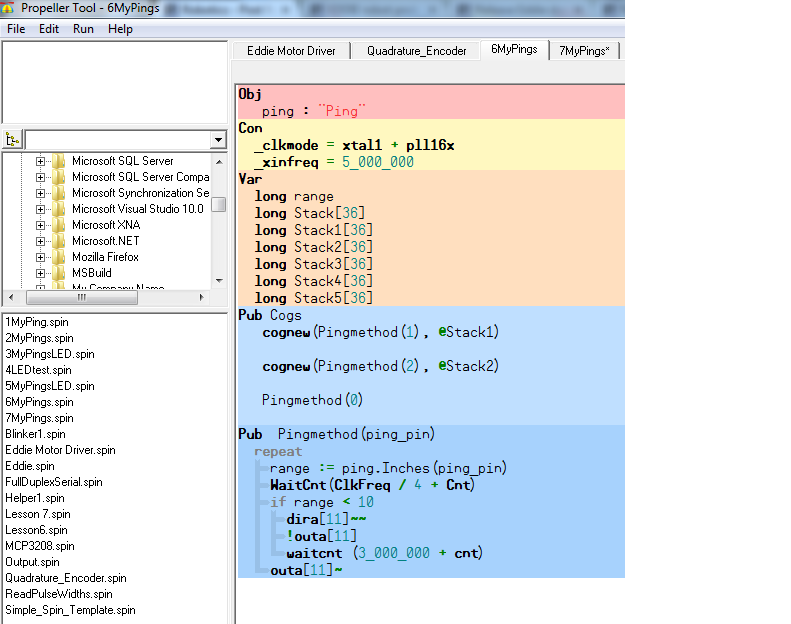 Here is the code to light an LED when an object is within 10 inches. At the bottom, instead of lighting an LED, I'd like to control the motors.
Here is the code to light an LED when an object is within 10 inches. At the bottom, instead of lighting an LED, I'd like to control the motors.
Any thoughts?
-Tim
I've only just completed the spin tutorials so spin is new to me. I've been told that I might be able to alter the firmware so that instead of the board communicating serially via some monitor, the board could communicate internally with the sensors. Perhaps someone more experienced in spin has made these alterations?
Any thoughts?
-Tim
791 x 624 - 66K
Comments
Try changing the pins on OUTA to the pins that your motors are on. Then adjust your code as needed from there. When starting out a lot of times it is just trial and error to see what works and what does not.
The Eddie board has on-board H-bridges, so it's these that I need to control via PWM (and something else that I'm not doing). I reviewed the data sheet for the H-bridges and the take a PWM signal from 0 to 20 kHz so I created very simple code that sends a 15 kHz signal to the appropriate pin(23), but nothing happened. I guess I'm just not sure how to properly use these H-bridges(VNH2SP30 by pololu).
Obj ping : "Ping" Con _clkmode = xtal1 + pll16x _xinfreq = 5_000_000 Var long range long Stack[36] long Stack1[36] long Stack2[36] long Stack3[36] long Stack4[36] long Stack5[36] Pub Cogs cognew(Pingmethod(1), @Stack1) cognew(Pingmethod(2), @Stack2) Pingmethod(0) Pub Pingmethod(ping_pin) repeat range := ping.Inches(ping_pin) WaitCnt(ClkFreq / 4 + Cnt) if range < 10 repeat dira[23]~~ !outa[23] waitcnt (79_985_000 + cnt) outa[23]~The 79_985_000 pause above is my attempt at creating a 15 kHz signal(80_000_000 -79_985_000 = 15_000).
The schematic and the data sheet are pretty much the only thing that I have to go off of.
I'm not sure what to do with the INA and the INB. I tried setting them both high to no avail.
Maybe it would be easier to just not use the on board H-bridges and just use external ones?
Tim
Maybe try INA=0 and INB=1 ?
Thanks for the help
Tim