

USing Ping))) sensor for academic purposes
 stephanc
Posts: 2
stephanc
Posts: 2
Dear all,
I wanted to call in your expertise since i'm not getting any further on my own.
I have been working several days now on getting full accuracy out of the ping))) sensors.
I understand i am pushing the sensors kind of to their limit, since I aim to measure water surface heights with millimeter accuracy.
Still , from my experience , it seems the ultrasonic sensor is able of this, beside one very unconvenient behavior , where the sensor values seem to be 'randomly' hopping by 0,4 cm (so about 40 microseconds).
Examples of this behavior can for example be seen at:
http://screencast.com/t/O1coRvv2
I added some small 'pipes' in front of the transmitter and receiver, in order to reduce random scatter of falling onto the sensor.
This seemed to be working helping ,but not solving the problem:
http://screencast.com/t/HzktVaVT7
As can be seen , the 'hops' now seem to be at a 'fixed' point , further encouraging the thought that there is indeed some kind of echo or geometrical cause. But then why is this 'hop' always constant in size , if it depends on geometrical setup.
I experimented some more with adding some 'pipes' , and tought i solved the issue.
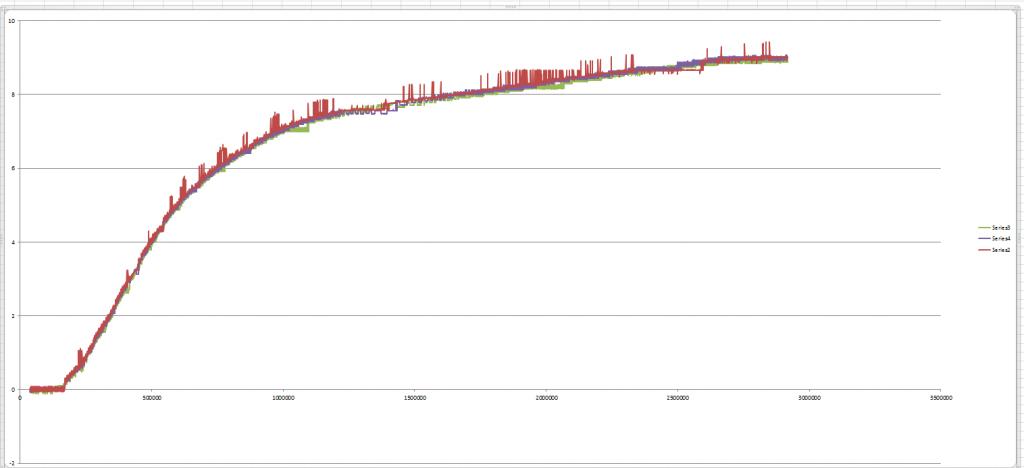
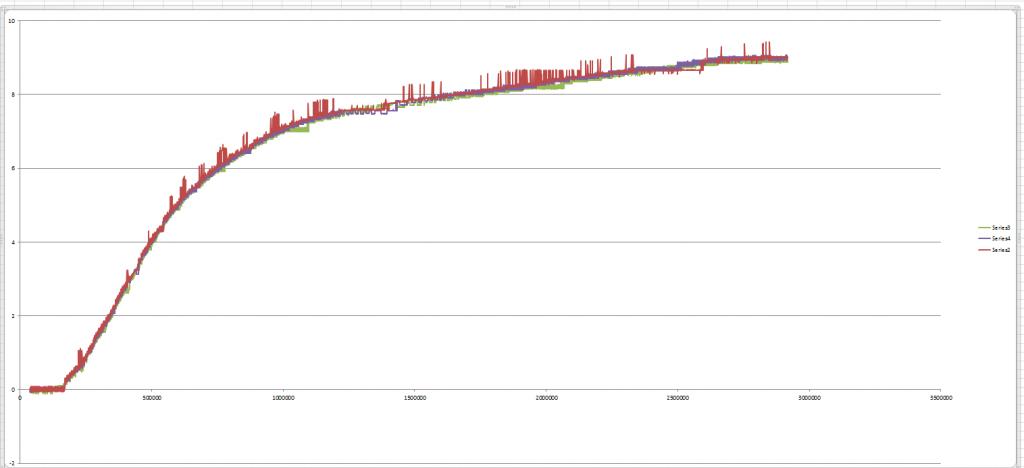
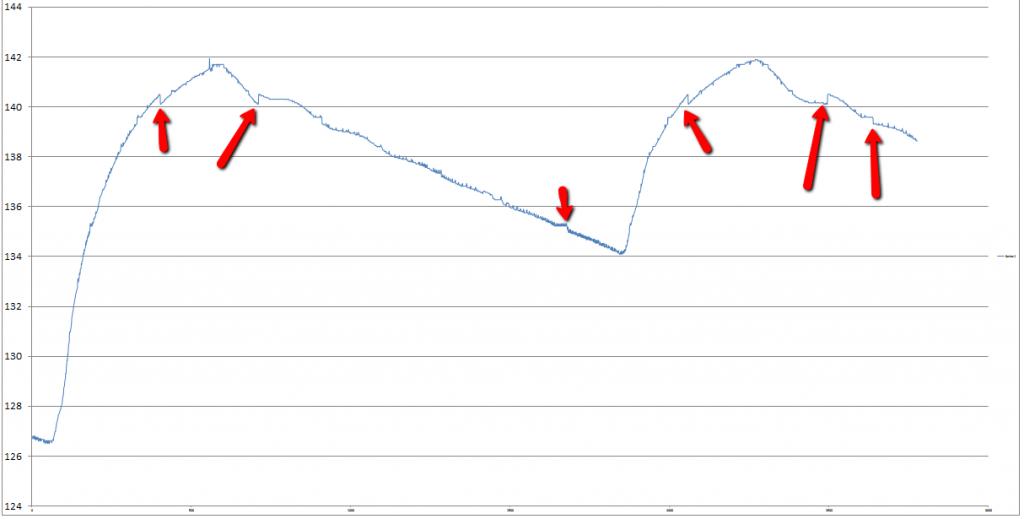
I did some 'long term' experiments with multiple sensors read simultaneously (sensors are all above same flume , but well separated in time , and read with 100 millis delay between , so no interference issues are present). As you can see, they nicely fall toghether in the beginning. Don't mind the measurements in the box, this is where i performed some experiments.
But then after that , you can see the behavior i mean very well. Suddenly the sensor seem to start 'hopping' by 0,4cm , stay at that level for a while , and then 'hop' back.
http://screencast.com/t/O5qASb0EABCu
At the location with multiple arrows 2 of the 4 sensors seem to 'hop' to a new equilibrium , being 0,4cm higher then the other 2 (and sometimes fall back to 'base level') for a while.You can see the accuracy is very high for periods with no hopping, but the hopping introduces the inaccuracy.
Since in normal measurements all sensors will read different levels , I will have no idea what the 'base' level is , and i need to be able to trust my calibration , and read all the sensors apart.
I"m out of things to try, and I hope anyone here can help me. I would be very grateful , but I am just out of inspiration.
Thanks in advance,
Stephan
I wanted to call in your expertise since i'm not getting any further on my own.
I have been working several days now on getting full accuracy out of the ping))) sensors.
I understand i am pushing the sensors kind of to their limit, since I aim to measure water surface heights with millimeter accuracy.
Still , from my experience , it seems the ultrasonic sensor is able of this, beside one very unconvenient behavior , where the sensor values seem to be 'randomly' hopping by 0,4 cm (so about 40 microseconds).
Examples of this behavior can for example be seen at:
http://screencast.com/t/O1coRvv2
I added some small 'pipes' in front of the transmitter and receiver, in order to reduce random scatter of falling onto the sensor.
This seemed to be working helping ,but not solving the problem:
http://screencast.com/t/HzktVaVT7
As can be seen , the 'hops' now seem to be at a 'fixed' point , further encouraging the thought that there is indeed some kind of echo or geometrical cause. But then why is this 'hop' always constant in size , if it depends on geometrical setup.
I experimented some more with adding some 'pipes' , and tought i solved the issue.
I did some 'long term' experiments with multiple sensors read simultaneously (sensors are all above same flume , but well separated in time , and read with 100 millis delay between , so no interference issues are present). As you can see, they nicely fall toghether in the beginning. Don't mind the measurements in the box, this is where i performed some experiments.
But then after that , you can see the behavior i mean very well. Suddenly the sensor seem to start 'hopping' by 0,4cm , stay at that level for a while , and then 'hop' back.
http://screencast.com/t/O5qASb0EABCu
At the location with multiple arrows 2 of the 4 sensors seem to 'hop' to a new equilibrium , being 0,4cm higher then the other 2 (and sometimes fall back to 'base level') for a while.You can see the accuracy is very high for periods with no hopping, but the hopping introduces the inaccuracy.
Since in normal measurements all sensors will read different levels , I will have no idea what the 'base' level is , and i need to be able to trust my calibration , and read all the sensors apart.
I"m out of things to try, and I hope anyone here can help me. I would be very grateful , but I am just out of inspiration.
Thanks in advance,
Stephan
1024 x 468 - 32K
1024 x 519 - 40K
1024 x 566 - 48K
Comments
This is an interesting topic to consider. Thank you for posting so much information about what you are trying to do.
Have you tried other ultrasound sensors besides the Ping? I recalling seeing some data suggesting the Maxbotix ultrasound sensors have bit better performance than the Ping. The Maxbotix sensors are more expensive but I'm under the impression, they are more accurate than other hobby grade ultrasound sensors.
I'm not sure if you're aware or not, but the forum software blocked this thread for a while. I don't know if the moderators ever figured out why the software initially blocked it. I'm glad they were able to get this thread to display. It's very interesting.
I suspect you may be seeing an artifact of how the microcontroller on the Ping measures the delay - either an interrupt response time, or a polling loop length.
Regards,
Bill
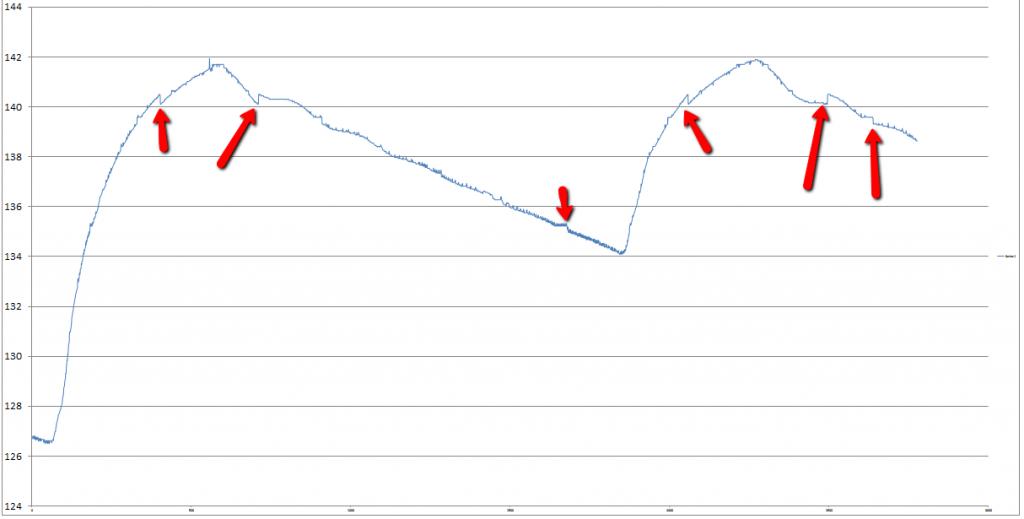
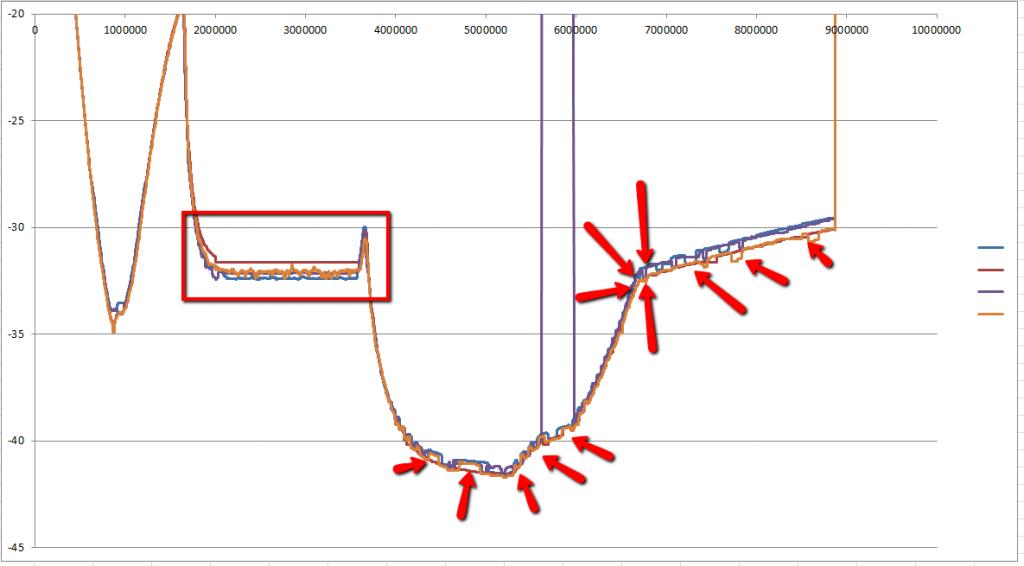
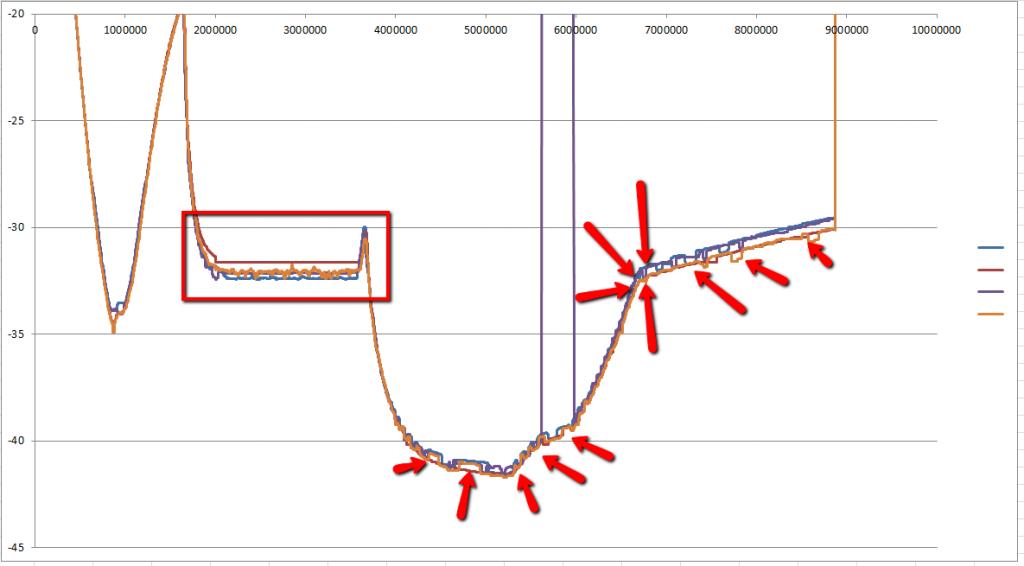
The thing is, when i very slowly fill the channel , i get a graph like this:
So on the vertical the distance , on the horizontal the time in microseconds, and in color the different sensors. (filling==negative values)
You can very nicely see that the sensors 'all together' nicely measure the distance in a continuous way. But individual sensors sometimes have the 'hopping' behaviour.
I concluded that when it would be an issue of time resolution i could not get continuous lines , but only some constant values in between which the measurements hop.
Because it's very clear that when you 'move' a wrong stretch of the measurement, it very nicely fits the continuous line.
I also tought about directly trying to read in the response of the receiver, in order to bypass the processing of the ping sensor itsself, but I don't know what connection I should try and measure.
If anyone would have an idea how i could achieve this this would already help.
I did not try other ultrasonic sensors yet , mainly because the sensors I have are already mounted in with some proper protection and means of placing them very precisely above the flume, so If things could work out the way they are it would be convenient.
I truly believe the sensors have the potential to be very accurate, if i am able to fix the 'hopping' behaviour.
I also thank anyone who does the effort to help out , and I promise to make a publicly available document on all my findings and work if i manage to solve the issue , so others can use it aswell.
Remember that energy and time are conjugate variables. Reducing the uncertainty of one increases the uncertainty of the other. Since an ultrasonic receiver measures energy, determining the time at which the measured return energy passes a threshold will have an uncertainty attached to it based on its wavelength. So I believe that what you're seeing is a limitation of ultrasonics in general, not of any particular implementation.
-Phil
http://forums.parallax.com/showthread.php/123785-Reflector-to-enhance-PING)))-performance-available