

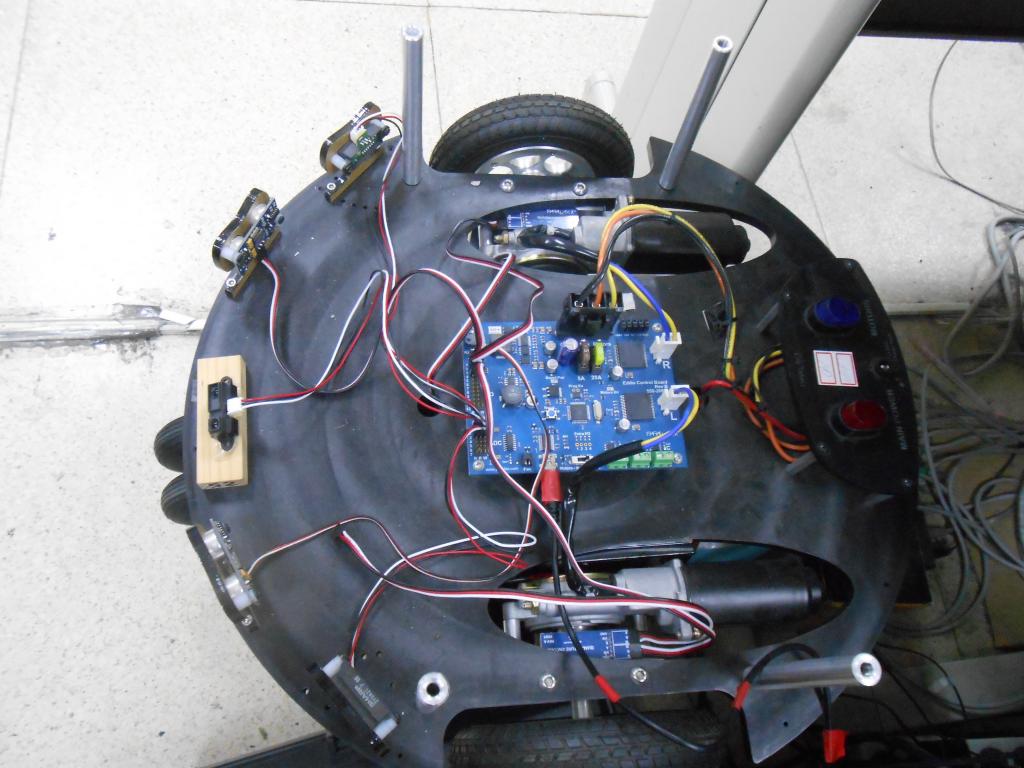
Eddie Robot movement problem

Hello anyone,
I am a novice in programming.
I hope that Eddie Robot can move accurately ,but I am unable to complete the work.
(Propeller Tool v1.3.2 is used for Eddie Robot)
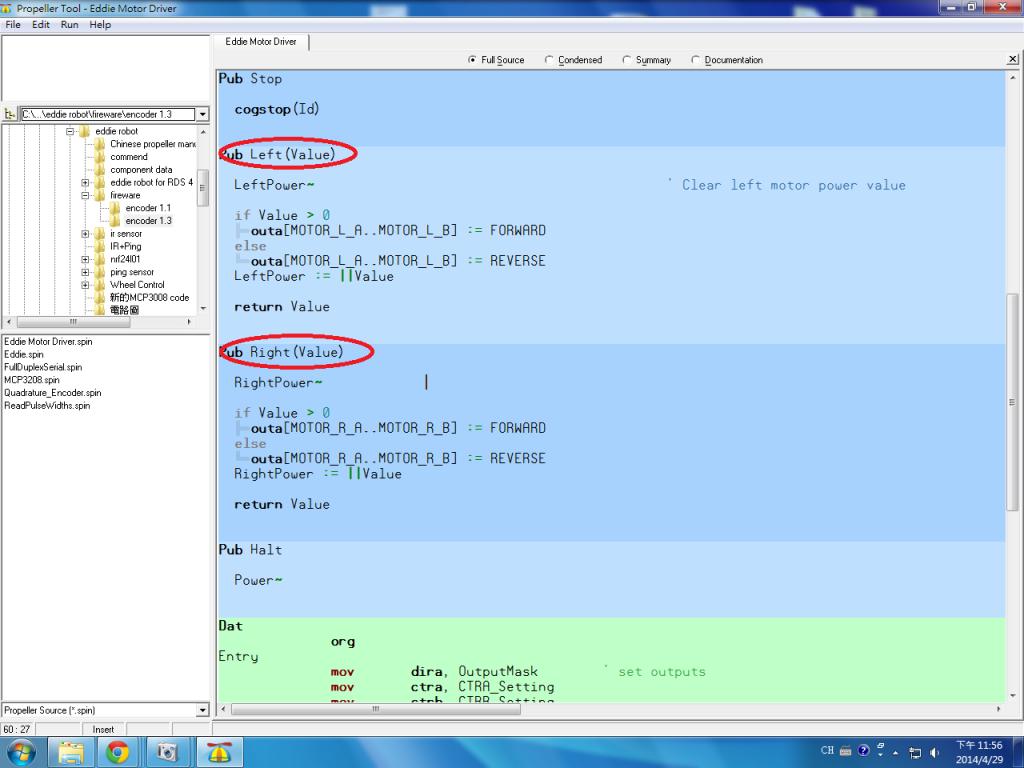
I used the drive( Eddie Motor Driver.spin).
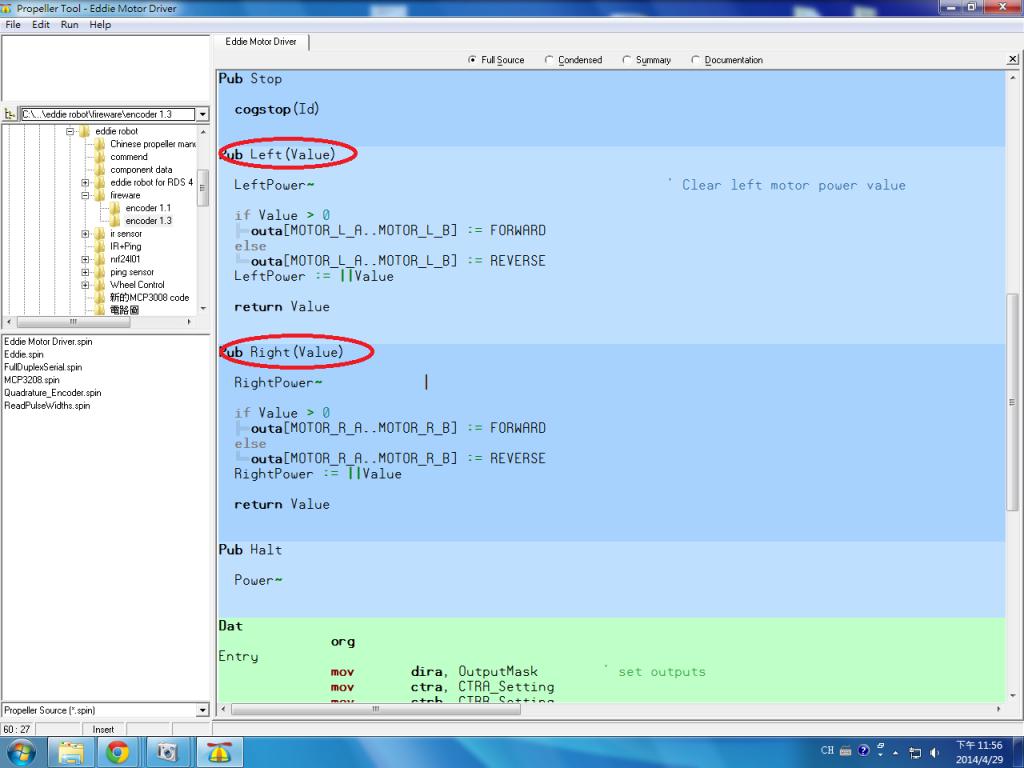
I used both functions ,and gave the same parameter.(value:=$FF)
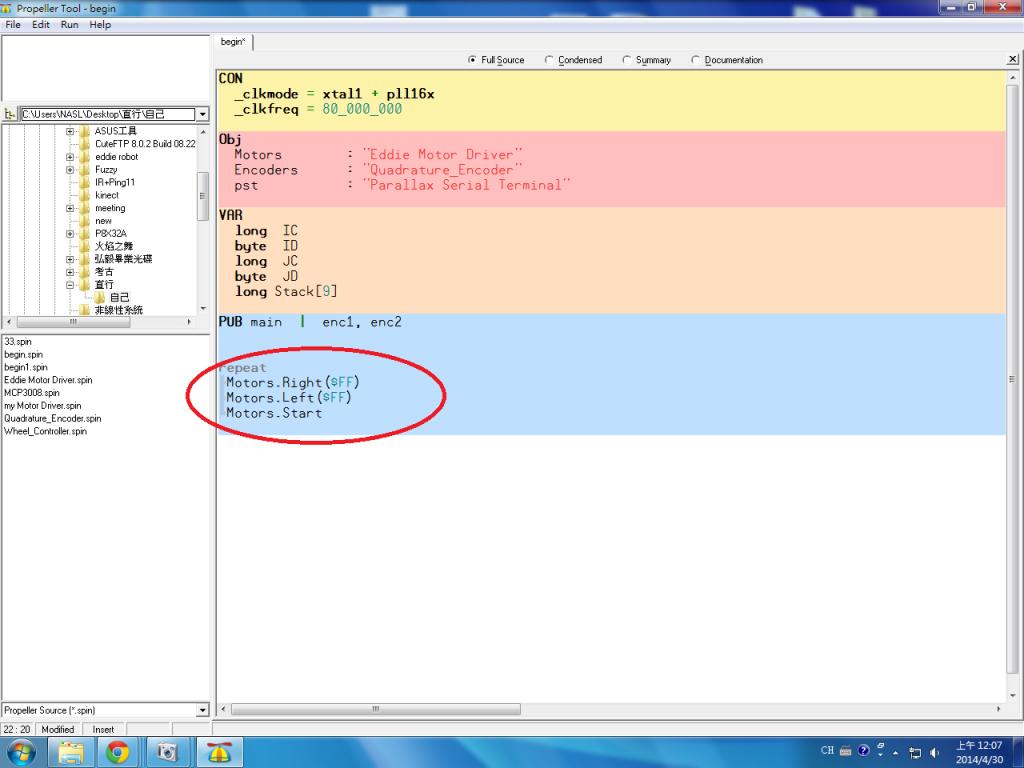
my simple code :
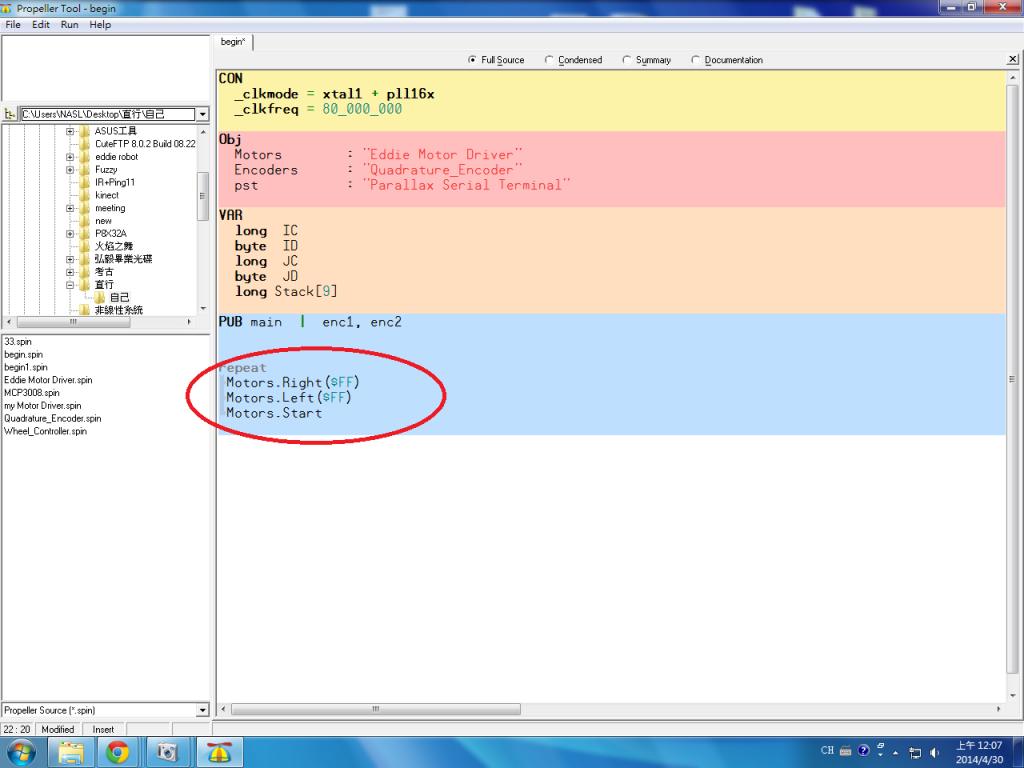
My simple code can't make Eddie Robot straight forward.
I don't know why the reason is.
Anyone's suggestion is good for me.
I am a novice in programming.
I hope that Eddie Robot can move accurately ,but I am unable to complete the work.
(Propeller Tool v1.3.2 is used for Eddie Robot)
I used the drive( Eddie Motor Driver.spin).
I used both functions ,and gave the same parameter.(value:=$FF)
my simple code :
My simple code can't make Eddie Robot straight forward.
I don't know why the reason is.
Anyone's suggestion is good for me.
1024 x 768 - 101K

1024 x 768 - 78K
1024 x 768 - 69K
Comments
thank your suggestion
I try to do it
Attachment not found.
the result:
Attachment not found.
Attachment not found.
Attachment not found.
I don't have any experience about control DC motor.
I find a lot of relevant information about this motor ,but the information can't help me effectively ,so l need the experience of the developers of Eddie Robot control to help me.
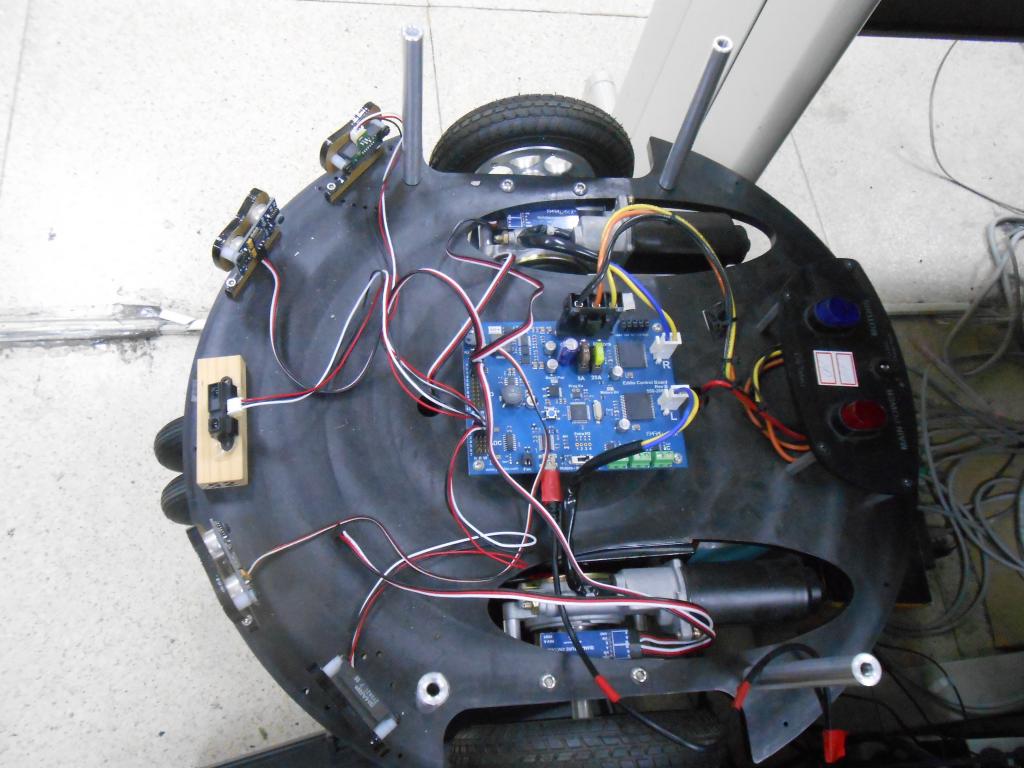
the result:
the Eddie Robot go to the right side.
using the PWM to control these motors.
I want to use PWM to control the input voltage of these motors ,but I don't know how to produce duty cycle.
can anyone tell me how long the period is ?