

Calculate?
 teganburns
Posts: 134
teganburns
Posts: 134
First off hey all!!  haven't been on the forums in quite a while.
haven't been on the forums in quite a while.
I have been trying to figure how to calculate for a stable tri-copter flight. I don't know how to take what the propeller reads from the MPU-9150 sensor ( http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Sensors/IMU/PS-MPU-9150A.pdf )
and make a control system that can send an output to the esc's and the one servo on the back.
I understand how a PID control loop works but have a hard time with the math of it all. And to add to all of that the sensor gives me tricky values to work with...
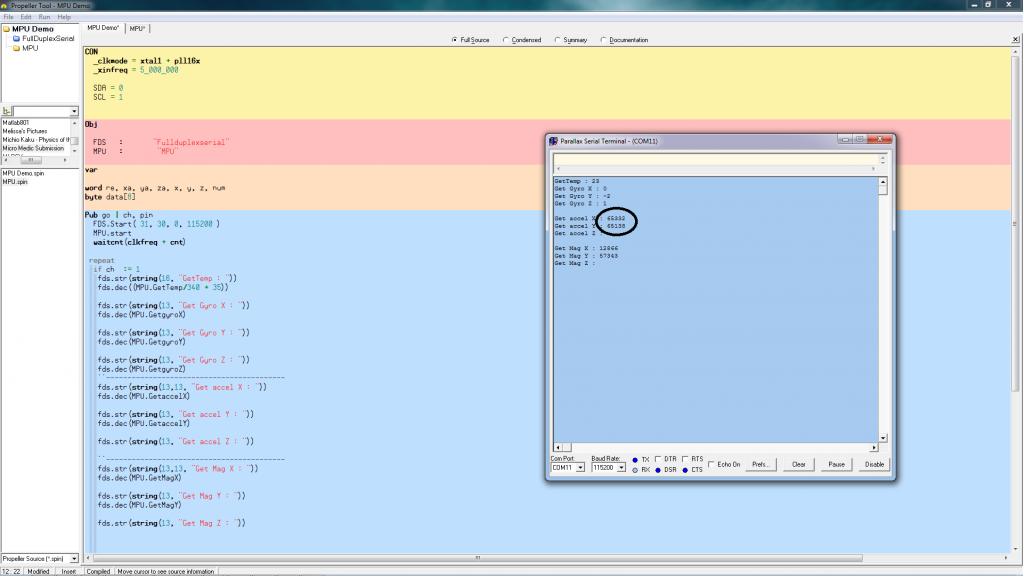
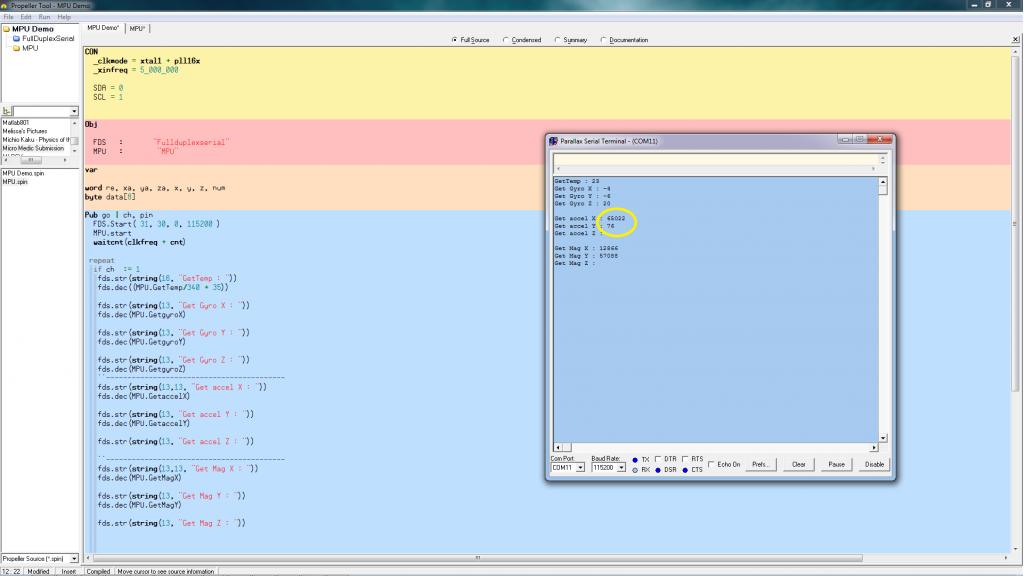
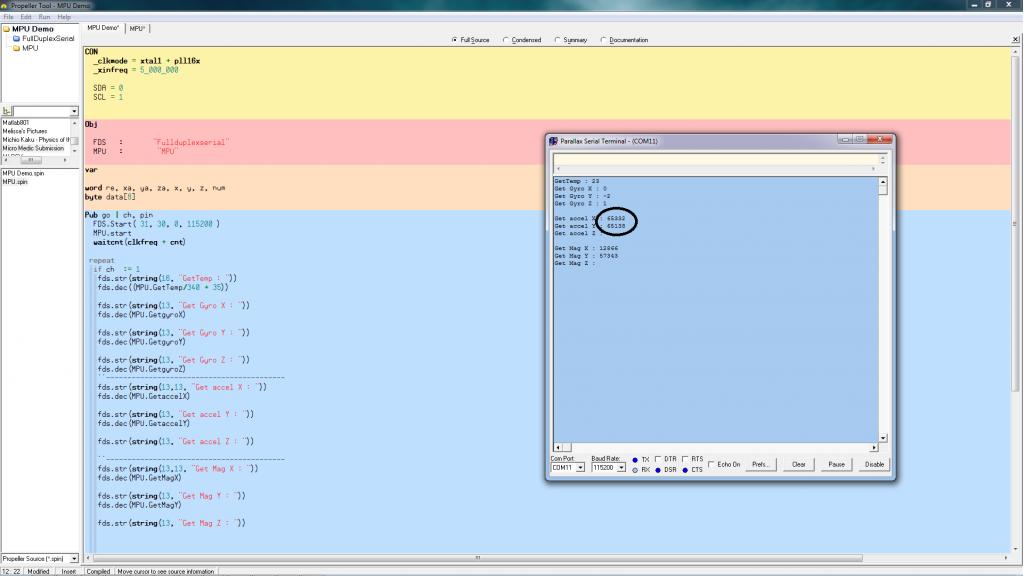
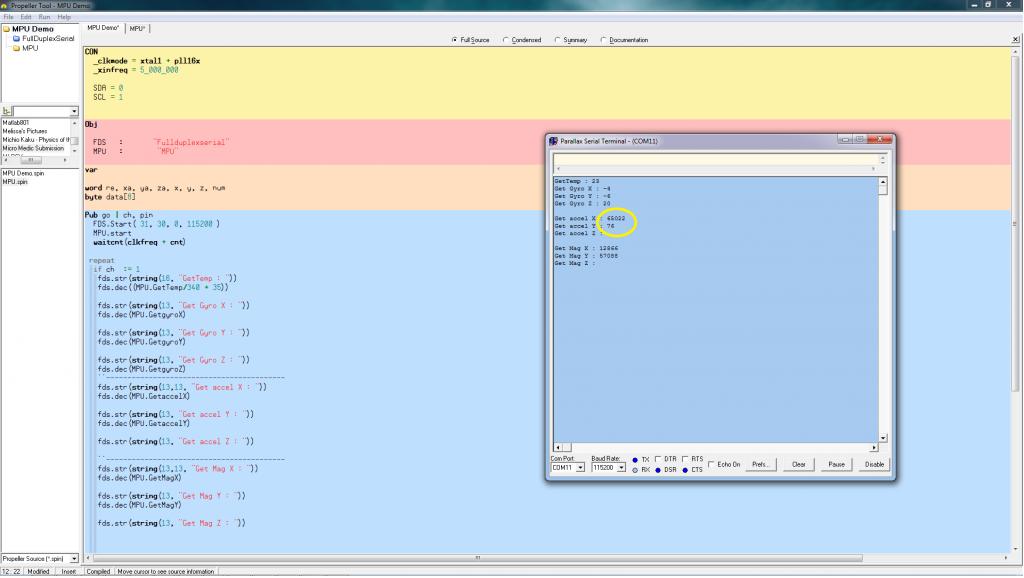
For example the tricopter could be "Perfectly level" and give me values of 65xxx or values of ~100 or less.
I hope what I'm saying makes sense lol feel free to ask for clarification
I have been trying to figure how to calculate for a stable tri-copter flight. I don't know how to take what the propeller reads from the MPU-9150 sensor ( http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Sensors/IMU/PS-MPU-9150A.pdf )
and make a control system that can send an output to the esc's and the one servo on the back.
I understand how a PID control loop works but have a hard time with the math of it all. And to add to all of that the sensor gives me tricky values to work with...
For example the tricopter could be "Perfectly level" and give me values of 65xxx or values of ~100 or less.
I hope what I'm saying makes sense lol feel free to ask for clarification
1024 x 578 - 57K
1024 x 578 - 57K
Comments
Do you want it human controlled, and just less likely to crash? Then take a look at Jason Dorie's quadrotor code. It will still take hard work, although not as much as autonomous hover.
I have used a lot of Jason's code and I was trying to change it around to work with a tricopter and with the sensor that I have. (again the MPU9150 gives weird values to work with)
And thanks for the link that's really useful!