

Fun with our Elev-8 at Microsoft Research
 Jay.Beavers
Posts: 7
Jay.Beavers
Posts: 7
http://droneguru.blogspot.com/2014/01/an-impromptu-quadcopter-drone-project.html
[h=3]An Impromptu Quadcopter Drone Project at Microsoft...[/h]
Having some spare time over the holidays, I post a question to the Microsoft Maker email group about how to go about picking a drone from among the numerous options available on the market. I get a response from Jay in Microsoft Research saying that he's just bought an "AeroQuad Arduino based flight control system and will be mating it to a Parallax ELEV-8 chassis" in January, and asking me to "show up at Building 112 on the morning of Jan 6 if I am interested". Suffice it to say that I am at the designated location on Monday, Jan 6. Turns out it is the week long Microsoft Research Make Fest kick off, and before I know it, I am part of a team of 6 whose goal it is to assemble a flight worthy drone with image and face recognition capabilities by end of the week. We have embraced the somewhat Orwellian undertaking of building a drone that can zone in on people in an area, photograph their faces, send the pictures to a face recognition cloud service, and identify a designated suspect...er, person. Here's how the week unfolds
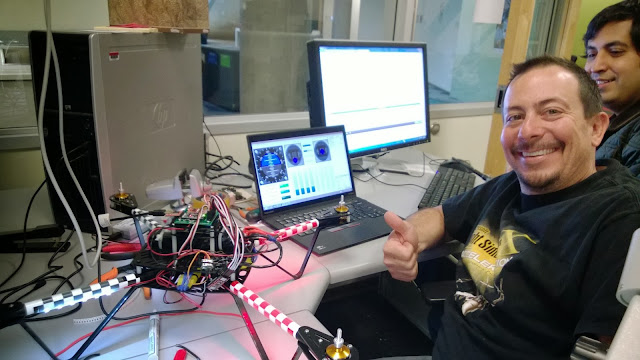
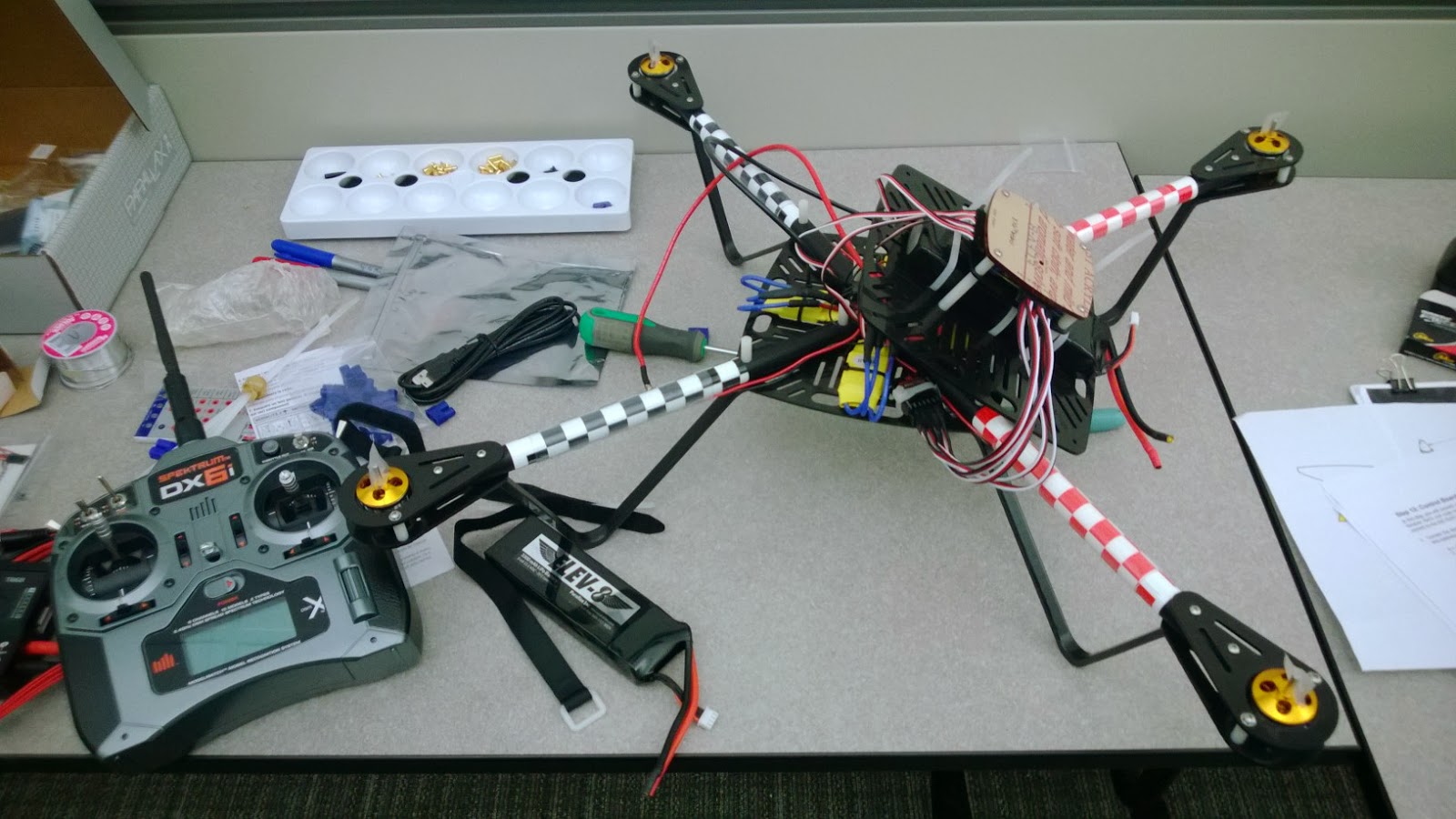
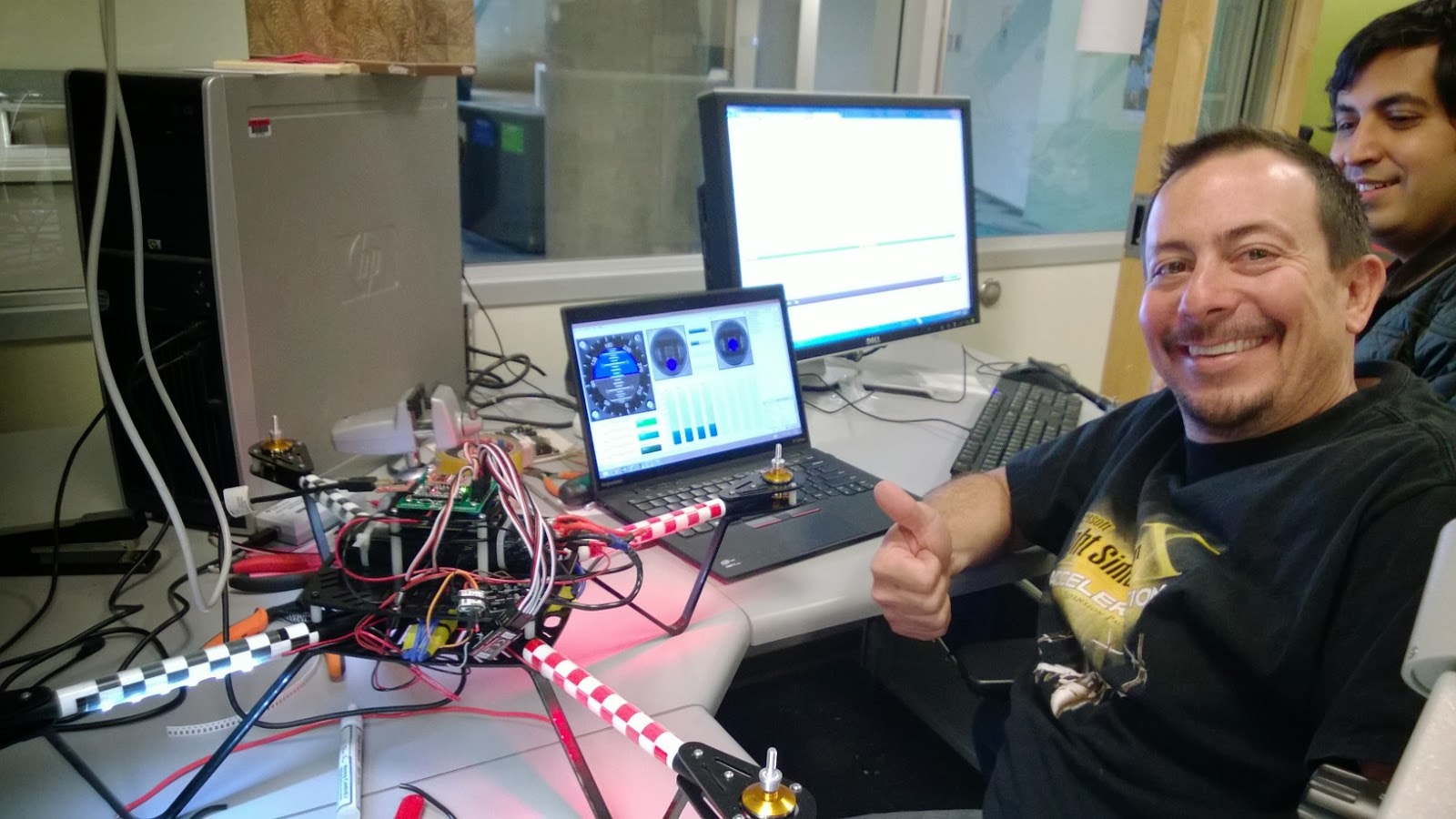
We convert a meeting room into our top secret quadcopter drone project HQ for the week, ducking in and out between meetings and our day jobs to work on the drone...
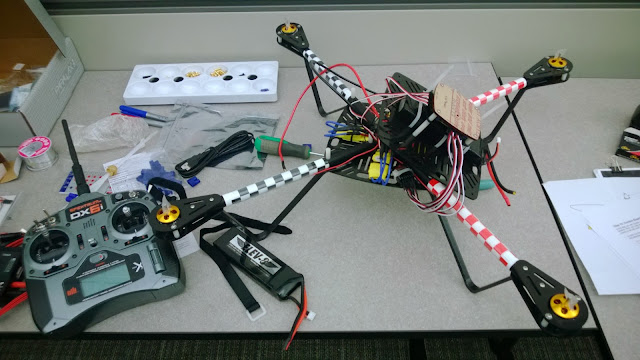
We unpack the Parallax ELEV-8 chassis

Mike and Ashish assemble the quadcopter. This takes them about 8 hours in all.
I get working on soldering the AeroQuad flight control board. I haven't done any soldering in nearly 20 years, so this takes me a few hours in all! Luckily, the awesome MSR workshop contains all the tools I'll ever need for the job, plus much more...

Another view of the MSR workshop, which is chock full of 3D printers, CNC machines, laser cutters, and other goodies...

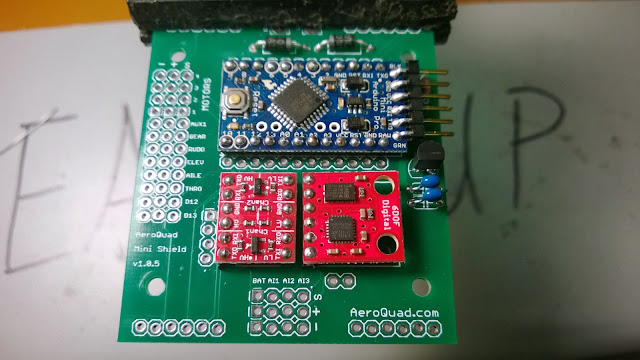
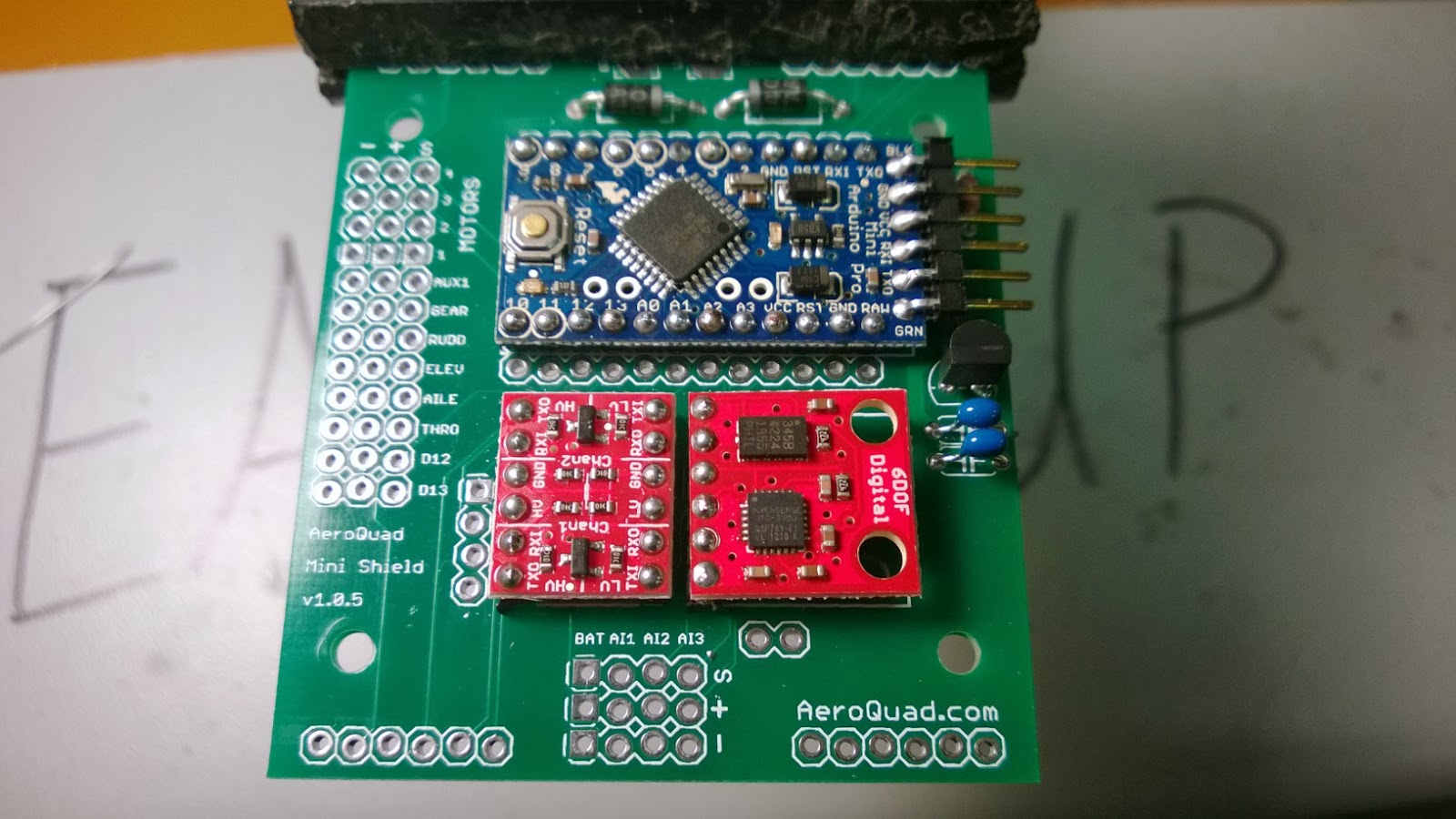
The finished AeroQuad flight control board contains the Arduino open source autopilot board, a 6DOF gyro and accelerometer, and the radio R/T board.
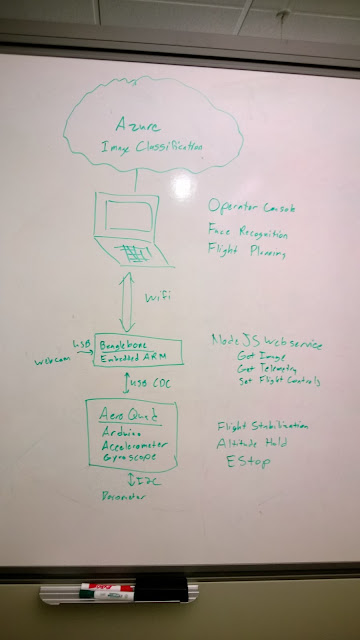
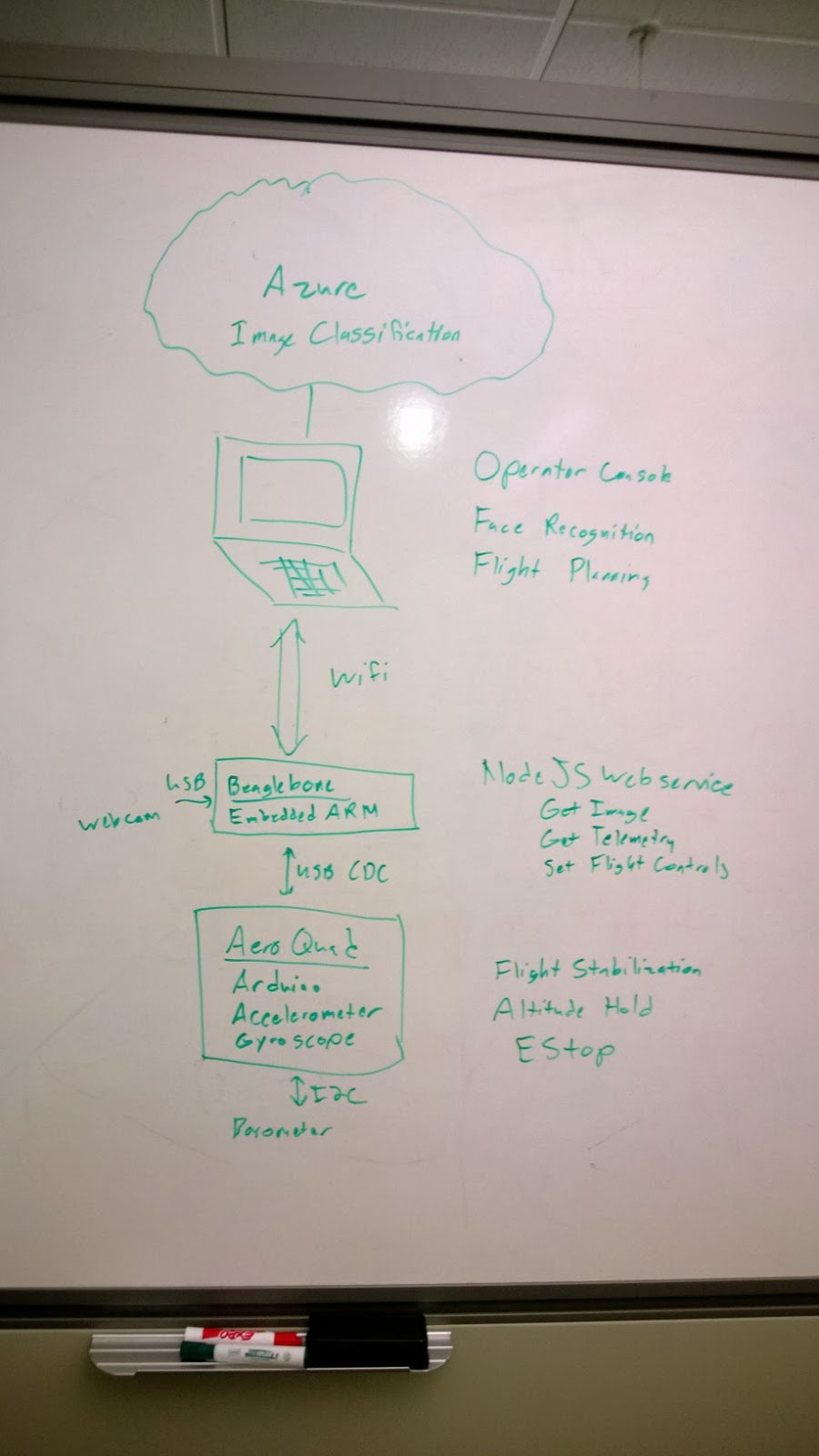
Jay, Andres and Mark work on getting the BeagleBone (a Raspberry Pi like computer) up and running with Ubuntu Linux. The BeagleBone will, among other things, run a NodeJS webservice enabling wi-fi transmission of telemetry data and the pictures and video taken by the drone's onboard cameras to the mission computer / laptop. See below for a whiteboard systems diagram...
Shady gets working on the getting the pictures and video from the mission computer / laptop to the MSR cloud to perform image analysis and face recognition. Not sure if it will work in all situations, though...

On Day 4, Mike and Ashish test the quadcopter in the lab...
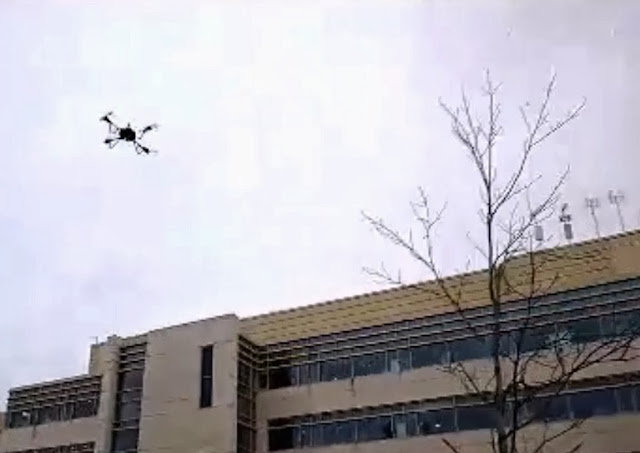
...and outdoors, where the quadcopter takes a somewhat unexpected trajectory through the air....(click for video)
The night before the projects are due, we cut a new part to mount the flight control board using Visio and the laser cutter

At the final presentation, we're careful to keep flying time and height to a minimum. You see, we didn't have time to implement the "altitude hold" feature, and a manually controlled quadcopter can be a lethal weapon......(click for video)

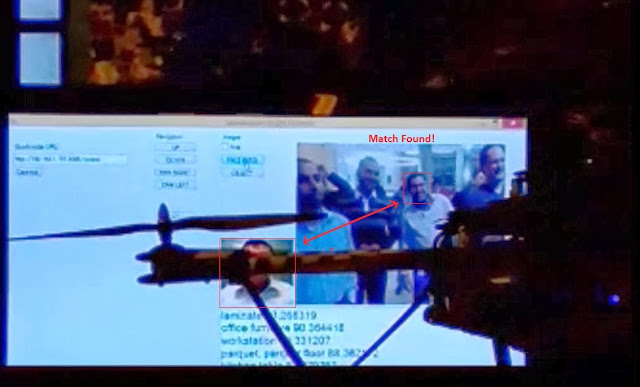
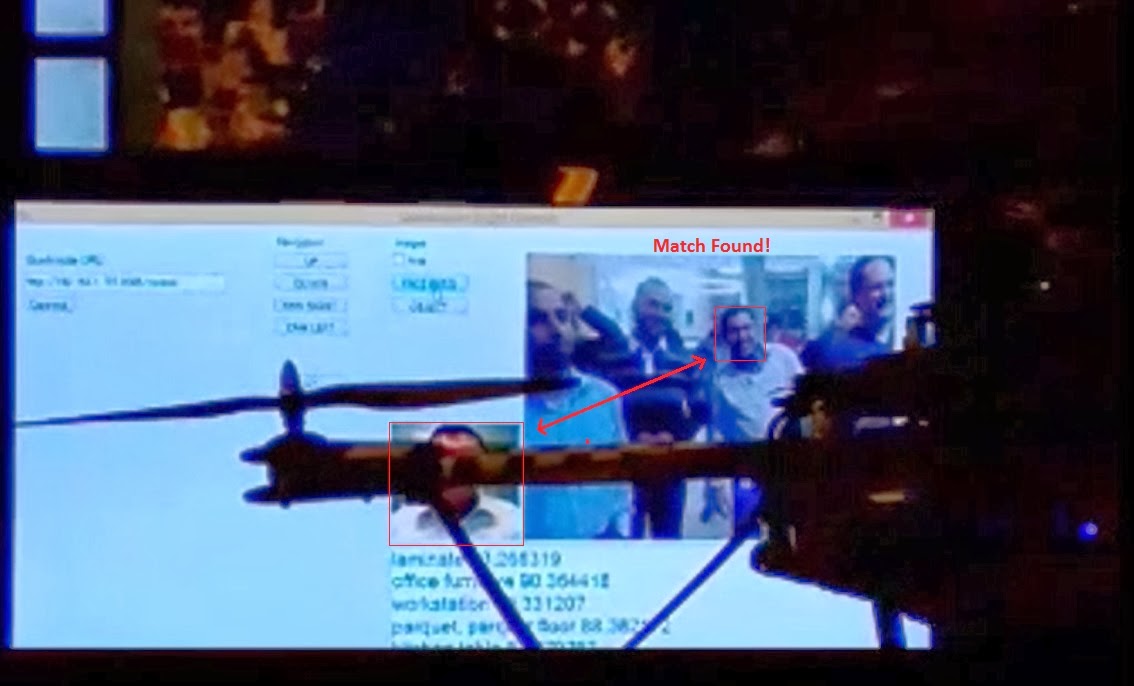
In the interest of safety, we demonstrate the face recognition feature by physically carrying the quadcopter up to Shady's face. The drone's camera captures Shady's picture ands sends it to the BeagleBone to the mission control laptop to the MSR Image / Face recognition Azure cloud, and we get a positive in about 5 seconds. It works! ... (click for video)
It's been a great week working with some amazingly smart and collaborative folks. Now, take a look at one of the other projects at the MSR Make Fest, the Fiber Optic Tree... (click for video)

Posted by Kris Shankar at 9:10 PM Email This
[h=3]An Impromptu Quadcopter Drone Project at Microsoft...[/h]
Having some spare time over the holidays, I post a question to the Microsoft Maker email group about how to go about picking a drone from among the numerous options available on the market. I get a response from Jay in Microsoft Research saying that he's just bought an "AeroQuad Arduino based flight control system and will be mating it to a Parallax ELEV-8 chassis" in January, and asking me to "show up at Building 112 on the morning of Jan 6 if I am interested". Suffice it to say that I am at the designated location on Monday, Jan 6. Turns out it is the week long Microsoft Research Make Fest kick off, and before I know it, I am part of a team of 6 whose goal it is to assemble a flight worthy drone with image and face recognition capabilities by end of the week. We have embraced the somewhat Orwellian undertaking of building a drone that can zone in on people in an area, photograph their faces, send the pictures to a face recognition cloud service, and identify a designated suspect...er, person. Here's how the week unfolds
We convert a meeting room into our top secret quadcopter drone project HQ for the week, ducking in and out between meetings and our day jobs to work on the drone...

We unpack the Parallax ELEV-8 chassis
Mike and Ashish assemble the quadcopter. This takes them about 8 hours in all.
I get working on soldering the AeroQuad flight control board. I haven't done any soldering in nearly 20 years, so this takes me a few hours in all! Luckily, the awesome MSR workshop contains all the tools I'll ever need for the job, plus much more...
Another view of the MSR workshop, which is chock full of 3D printers, CNC machines, laser cutters, and other goodies...

The finished AeroQuad flight control board contains the Arduino open source autopilot board, a 6DOF gyro and accelerometer, and the radio R/T board.
Jay, Andres and Mark work on getting the BeagleBone (a Raspberry Pi like computer) up and running with Ubuntu Linux. The BeagleBone will, among other things, run a NodeJS webservice enabling wi-fi transmission of telemetry data and the pictures and video taken by the drone's onboard cameras to the mission computer / laptop. See below for a whiteboard systems diagram...
Shady gets working on the getting the pictures and video from the mission computer / laptop to the MSR cloud to perform image analysis and face recognition. Not sure if it will work in all situations, though...

On Day 4, Mike and Ashish test the quadcopter in the lab...
...and outdoors, where the quadcopter takes a somewhat unexpected trajectory through the air....(click for video)
The night before the projects are due, we cut a new part to mount the flight control board using Visio and the laser cutter

At the final presentation, we're careful to keep flying time and height to a minimum. You see, we didn't have time to implement the "altitude hold" feature, and a manually controlled quadcopter can be a lethal weapon......(click for video)

In the interest of safety, we demonstrate the face recognition feature by physically carrying the quadcopter up to Shady's face. The drone's camera captures Shady's picture ands sends it to the BeagleBone to the mission control laptop to the MSR Image / Face recognition Azure cloud, and we get a positive in about 5 seconds. It works! ... (click for video)
It's been a great week working with some amazingly smart and collaborative folks. Now, take a look at one of the other projects at the MSR Make Fest, the Fiber Optic Tree... (click for video)

Posted by Kris Shankar at 9:10 PM Email This
Comments
Motley lookin' group of guys, but terrific workshop. Just how it's supposed to be!!
We are in the process of creating a much larger ELEV-8, the ELEV-8 Super. This one carries a 10-lb payload, has very good stability, and about a 15-minute flight time. Propeller hub to hub measurements are about 36" so this thing is really large. Propellers are 16" wooden as shown below, but we're probably going to switch to carbon fiber. Airframe materials are carbon fiber, 0.035" wall 7/8" aluminum tubes, and a small pile of hardware. This whole system is so big that it's really easy to inside the airframe and add whatever you desire.
Also, we will offer it without a control system, but will stock the Hoverfly OPEN and PRO boards. For the ArduPilot users the airframe-only kit could be really practical.
Thanks for using our platform!
Ken Gracey