

How to use the Hacker Port inside the Scribbler 2 to control a servo ?
 Jarvan
Posts: 31
Jarvan
Posts: 31
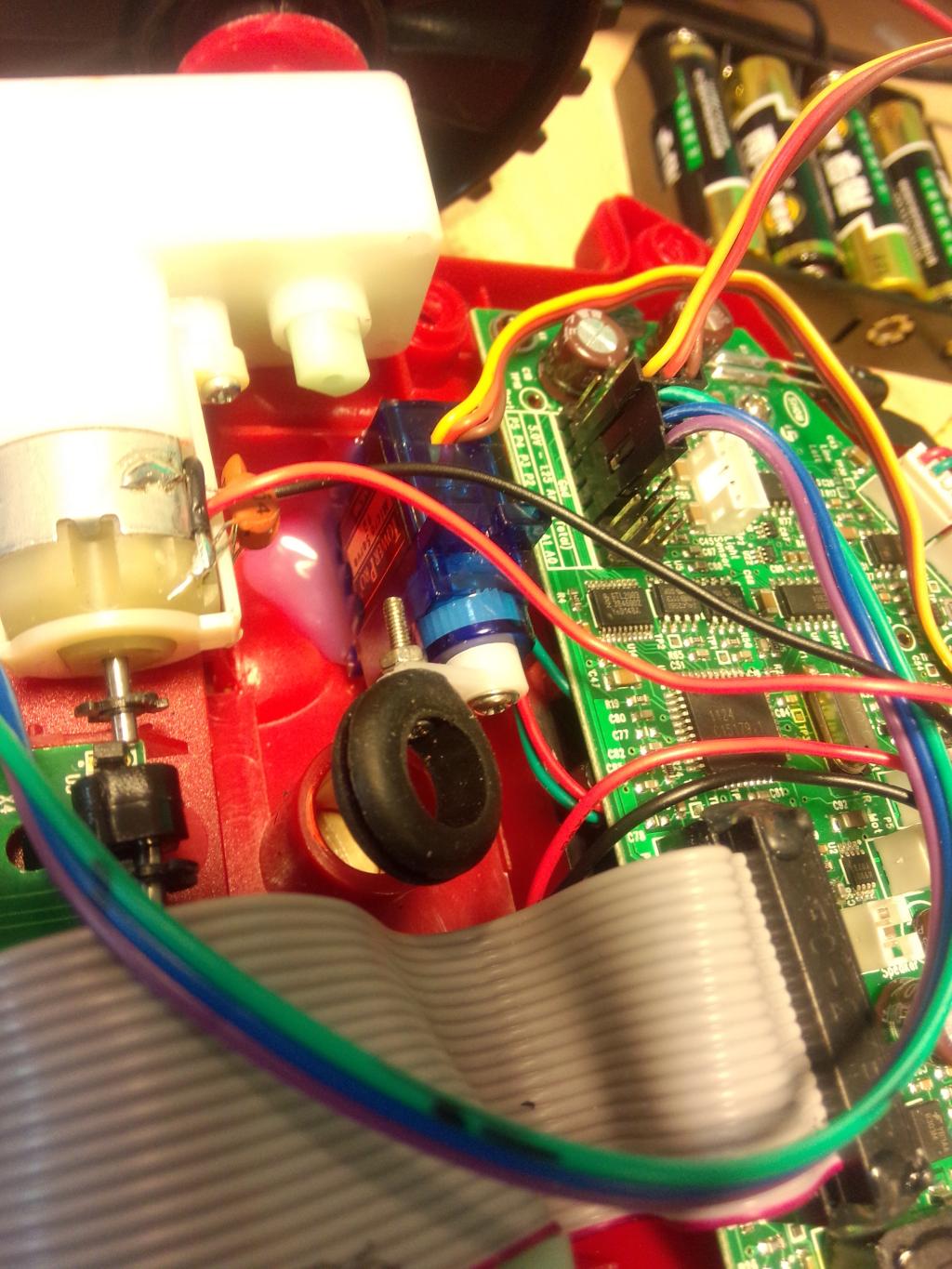
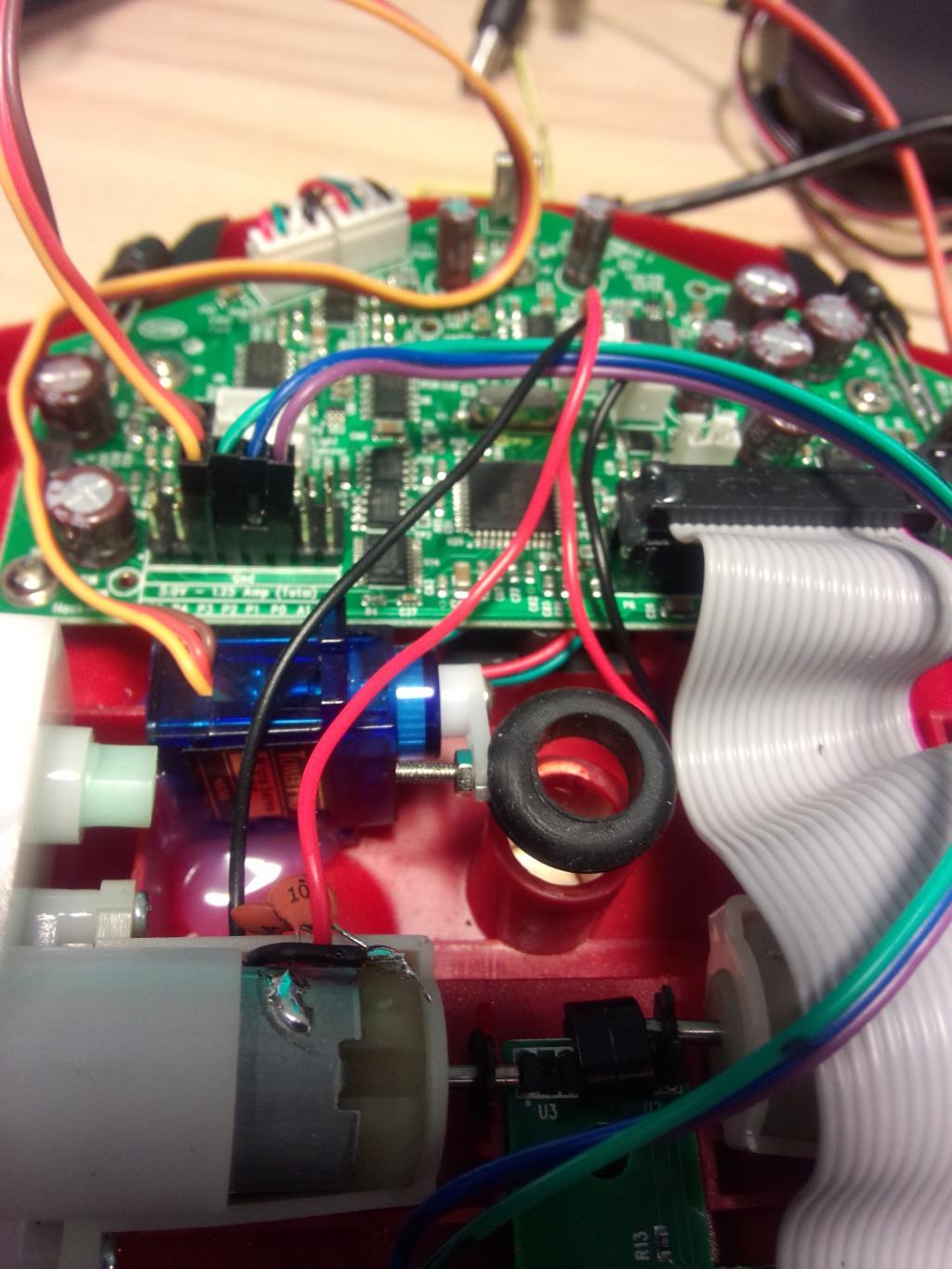
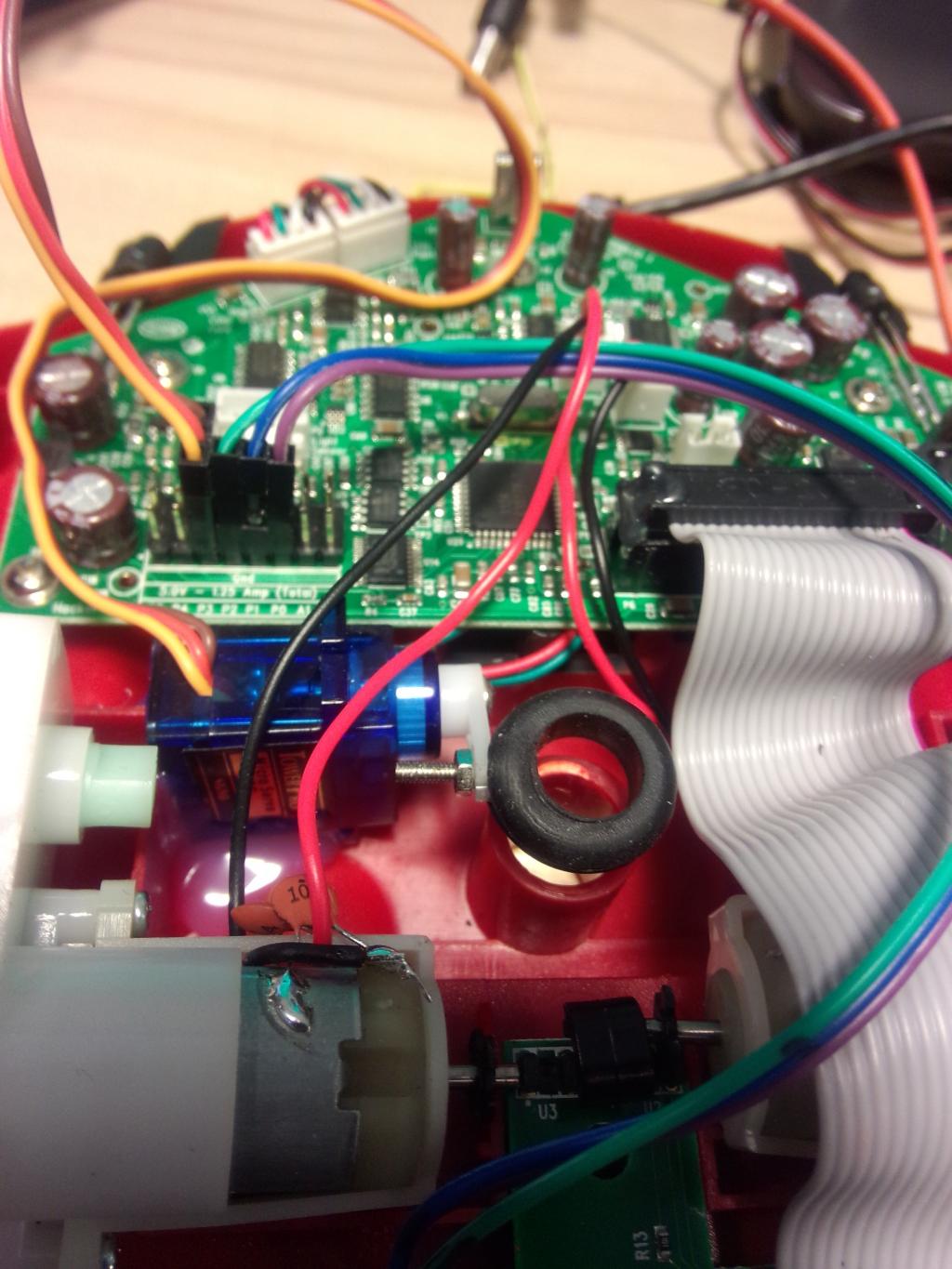
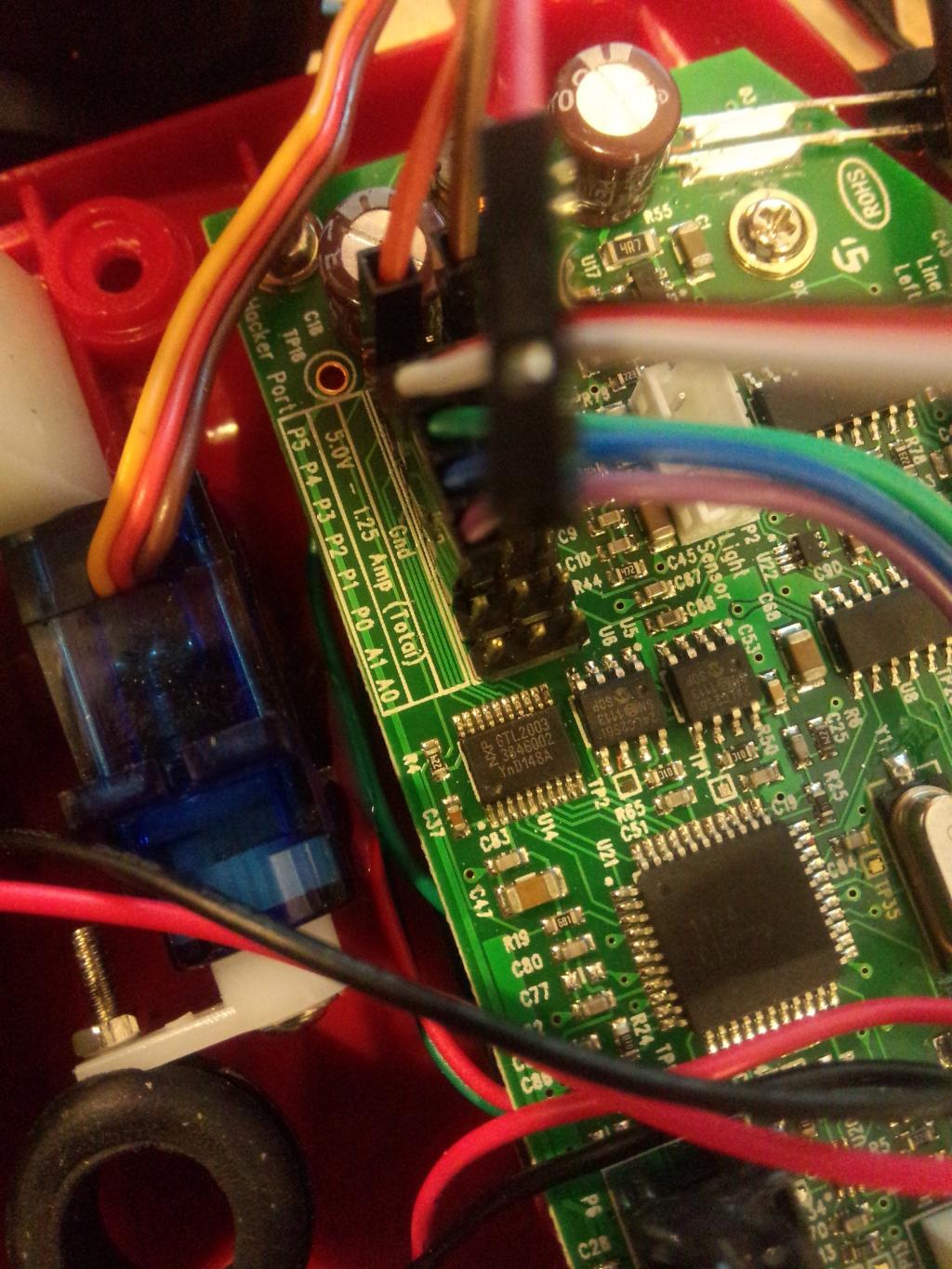
As the picture shows , using a servo to lift the pen to draw better.
Con
_CLKMODE = XTAL1 + PLL16X
_XINFREQ = 5_000_000
Obj
servo : "servo32v7"
Pub Main
servo.start
repeat
servo.Set(3,1900)
waitcnt(clkfreq * 2 + cnt)
servo.Set(3,2200)
waitcnt(clkfreq * 2 + cnt)
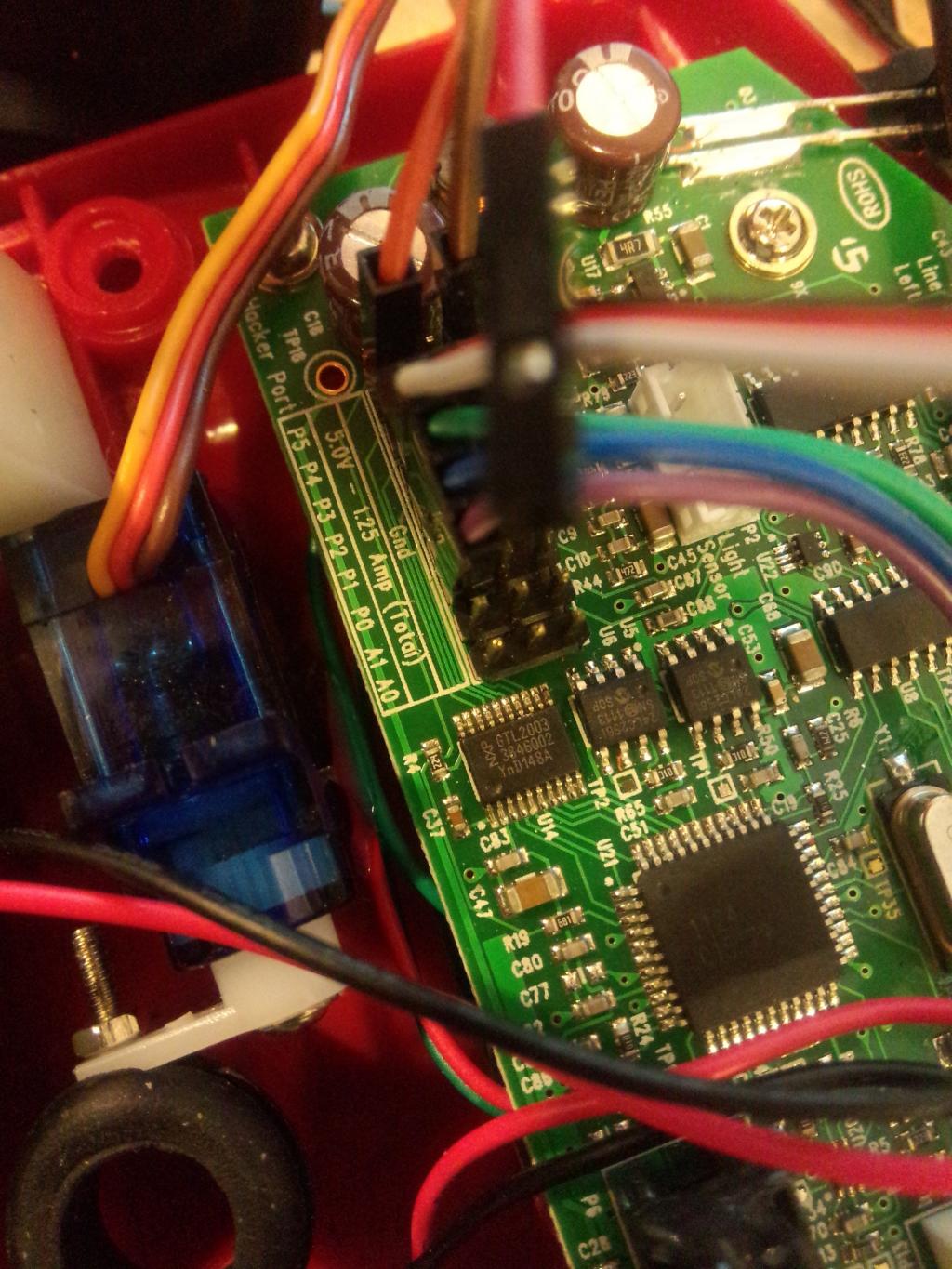
I code a spin code to control the servo, It's work well on the ActivityBoard , but when I load it to Scribbler 2, and connect the servo to Pin3 which marked as Hacker Port , the codes do not work. I checked the S2 schematic and I noticed a Logic Level Tranlator between the I/O pin and the Port. How can I use the Pin3 on the Scribber as usual ? 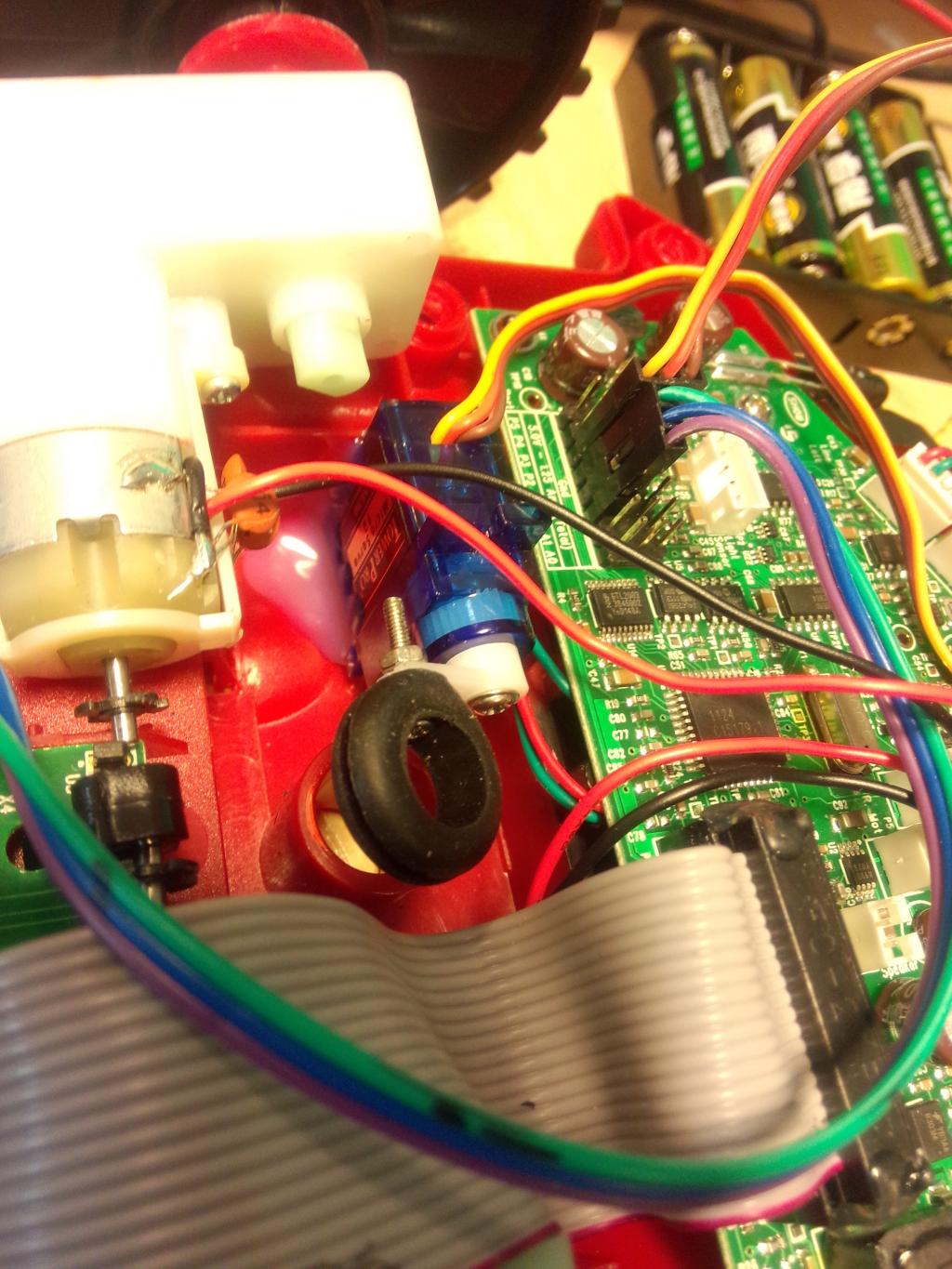
1024 x 1365 - 177K
1024 x 1365 - 145K
1024 x 1365 - 198K
Comments
For full motion you'd use 1000 and 2000 (though servos can often move beyond these limits).
The only way to use the P3 without the level translator would be to remove the translator chip. I've been tempted to do this myself. I don't like the level translator but it shouldn't be causing you a problem with your servo.
All I can think of is your not using a large enough pulse difference.