

EasyIMU Development
 Nick Ernst
Posts: 138
Nick Ernst
Posts: 138
Hey Everyone,
I just wanted to give a sneak peak of the new EasyIMU that I am almost done developing. I also wanted to get a few opinions about what data I should make available for you to have access to.
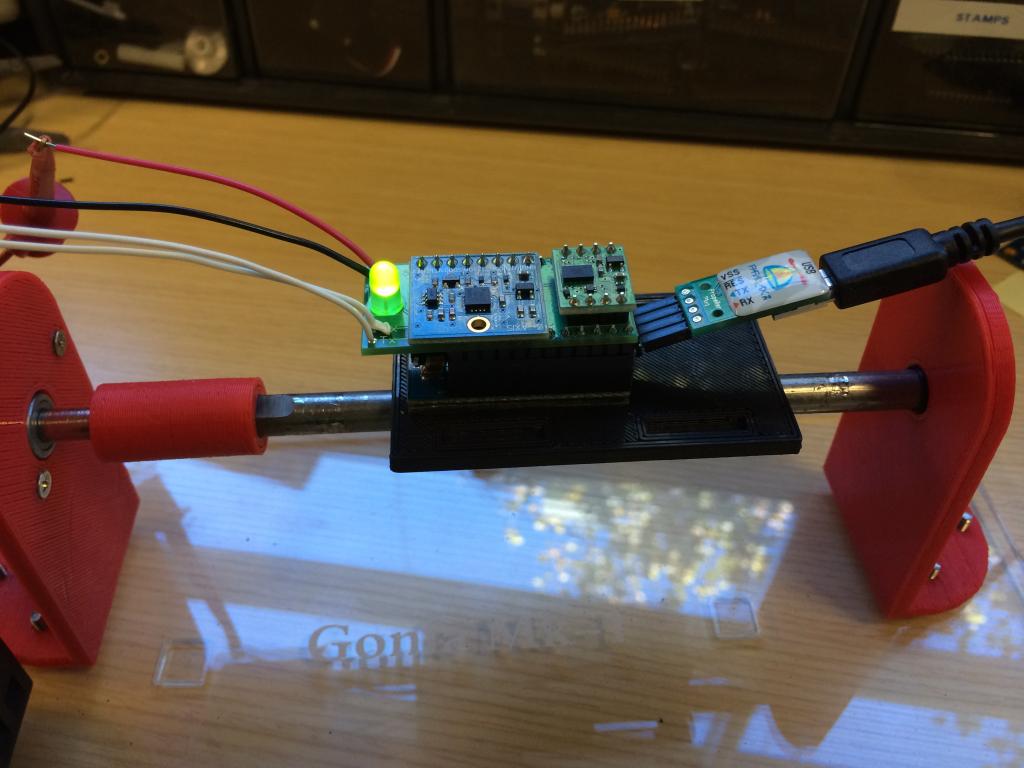
Let me first start with an overview of the module. It is an expansion board that will plug into a Propeller Mini with an MMA7455 3-Axis Accelerometer and an L3G4200D Gyroscope on it. The intent is for the Propeller Mini and EasyIMU Board to be a standalone device that you can query with a Basic Stamp or another Propeller, and get the calculated tilt-compensated angles back from. The sensors are the ones that we currently sell, and you will just solder them onto the expansion board and be set. Once the sensors are ready, you will upload the EasyIMU Firmware and be ready to get data from the Rx and Tx lines on the EasyIMU expansion board to the microcontroller you desire. The Propeller Mini and EasyIMU board are powered by the power input connections on the EasyIMU board as well.
Now for what it does: I am currently running a Complementary Filter on the Propeller Mini that reads all six axes of the sensors, and then calculates the tilt compensated angles for the X,Y and Z axes.
The big question that I have for all of you is what data you would want/need from the device considering that it already calculates the tilt-compensated angles. With this data already being done, is there any need for the raw readings to be accessible considering you can buy the module by itself and plug it into a board and get the raw readings? I am on the side of not having that information be accessible because this is designed to give you a quick 6-axis IMU that calculates the angles for you, and the only reason I can see having the raw measurements would be to calculate the angles!
Let me know what you guys think and I'll go from there
!
I just wanted to give a sneak peak of the new EasyIMU that I am almost done developing. I also wanted to get a few opinions about what data I should make available for you to have access to.
Let me first start with an overview of the module. It is an expansion board that will plug into a Propeller Mini with an MMA7455 3-Axis Accelerometer and an L3G4200D Gyroscope on it. The intent is for the Propeller Mini and EasyIMU Board to be a standalone device that you can query with a Basic Stamp or another Propeller, and get the calculated tilt-compensated angles back from. The sensors are the ones that we currently sell, and you will just solder them onto the expansion board and be set. Once the sensors are ready, you will upload the EasyIMU Firmware and be ready to get data from the Rx and Tx lines on the EasyIMU expansion board to the microcontroller you desire. The Propeller Mini and EasyIMU board are powered by the power input connections on the EasyIMU board as well.
Now for what it does: I am currently running a Complementary Filter on the Propeller Mini that reads all six axes of the sensors, and then calculates the tilt compensated angles for the X,Y and Z axes.
The big question that I have for all of you is what data you would want/need from the device considering that it already calculates the tilt-compensated angles. With this data already being done, is there any need for the raw readings to be accessible considering you can buy the module by itself and plug it into a board and get the raw readings? I am on the side of not having that information be accessible because this is designed to give you a quick 6-axis IMU that calculates the angles for you, and the only reason I can see having the raw measurements would be to calculate the angles!
Let me know what you guys think and I'll go from there
!
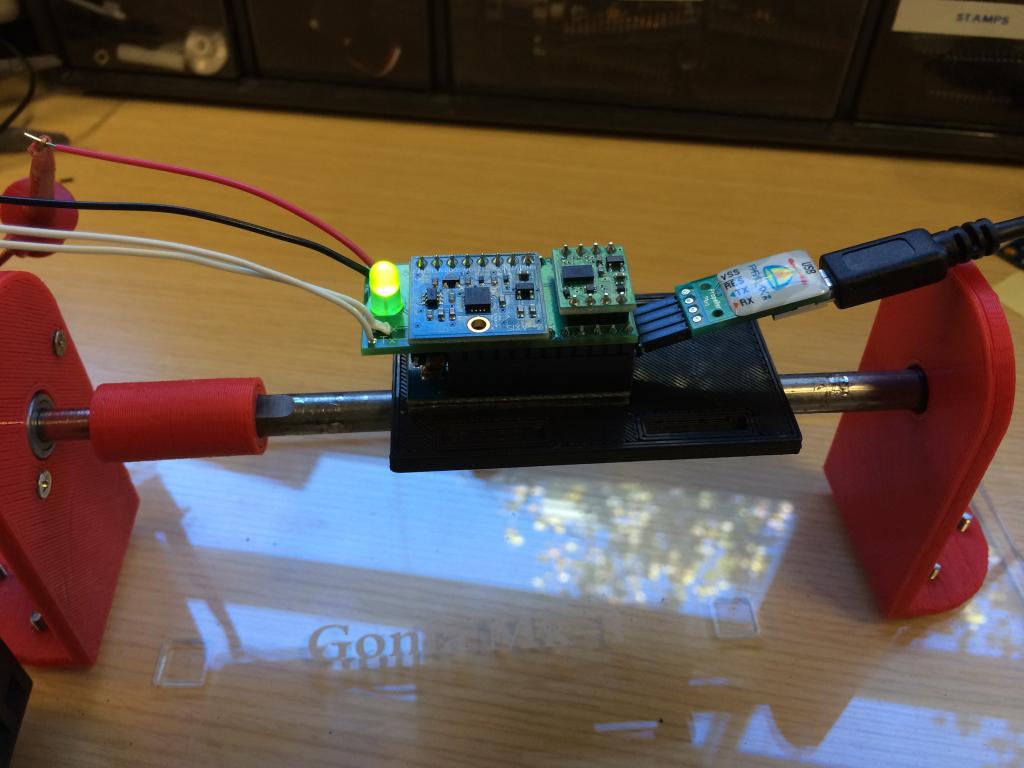
1024 x 768 - 71K
Comments
Is it possible to use it with a Propeller to stabilize a quad copter ?
It needs quick data updates. About 300 per sec.
Jean Paul
How is the project going?
Jim