

Rocker-Bogie versus Universal Joint suspension.

Pictured below is my 4x4 robot which I've shown in two videos climbing over obstacles or driving on carpet with much greater agility than my tracked or two wheel drive robots.

It's a good robot and I like the design because it always has three drive wheels in contact with the ground. But I've been reading about rocker-bogie and universal joint suspensions that allow all four drive wheels to be in contact with the ground. Here's Dino's example of rocker-bogie:

Here's the forum's Brian_B and his universal joint rover:

Does anyone have any thoughts on which design has greater merits? On the surface the universal joint design looks easier to build as the part count seems smaller. However it does have the disadvantage that the body portion is in two pieces. Rocker-bogie lets you have a single body section and perhaps works better for differential steering.
Update:
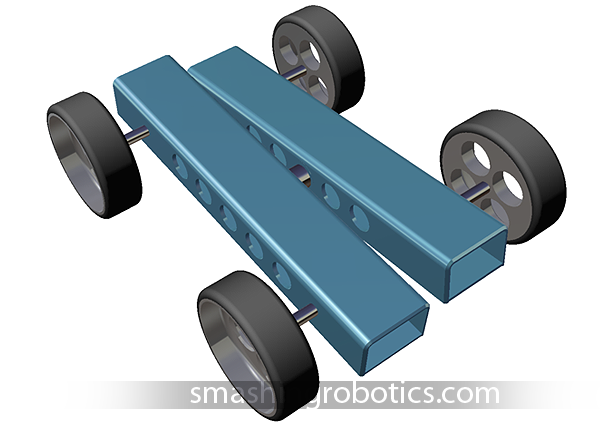
I found another kind of chassis design called a transversely split. It's basically a rocker-bogie without a central chassis.
It's a good robot and I like the design because it always has three drive wheels in contact with the ground. But I've been reading about rocker-bogie and universal joint suspensions that allow all four drive wheels to be in contact with the ground. Here's Dino's example of rocker-bogie:
Here's the forum's Brian_B and his universal joint rover:
Does anyone have any thoughts on which design has greater merits? On the surface the universal joint design looks easier to build as the part count seems smaller. However it does have the disadvantage that the body portion is in two pieces. Rocker-bogie lets you have a single body section and perhaps works better for differential steering.
Update:
I found another kind of chassis design called a transversely split. It's basically a rocker-bogie without a central chassis.

1024 x 768 - 78K
Comments
It's a nice looking rover too. I do like the idea that the craft only tilts half as much as the wheels. Flipping over is probably a bigger concern than loss of traction.
I think the old Tyco Rebound design is simple, elegant & foolproof. Big dumb fixed shock absorbing tires, 4WD skid steering. http://www.ebay.com/itm/TYCO-REBOUND-4X4-Remote-Control-Car-/121220000562?pt=Radio_Control_Vehicles&hash=item1c39466b32
Super Rebound had your transverse split (only the left bogie spun): http://www.ebay.com/itm/TYCO-TMH-Super-Rebound-Radio-Controlled-RC-Car-w-Rechargable-Battery-Pack-/310799258140?pt=Radio_Control_Vehicles&hash=item485d14521c&nma=true&si=IhBlnPFU%252BuKReCK6iMBzFmHQE5s%253D&orig_cvip=true&rt=nc&_trksid=p2047675.l2557
Read about it here (and see the first reference at the bottom of the page -- yeah, that's me).
http://en.wikipedia.org/wiki/Landmaster
and be sure to see the animation here:
http://en.wikipedia.org/wiki/Tri-star_(wheel_arrangement)
Erco, I like the 80/20 split of the Super Rebound. It keeps all four wheels on the ground, but keeps one side big enough for a payload of electronics and sensors.
For $10, your course of action is clear.
I've always liked the Landmaster. Think it would be the perfect solution to San Francisco traffic! =:-)
@