

Need help: Re-calibration of ActivityBot failed
 chillitilli
Posts: 5
chillitilli
Posts: 5
Hey everyone!
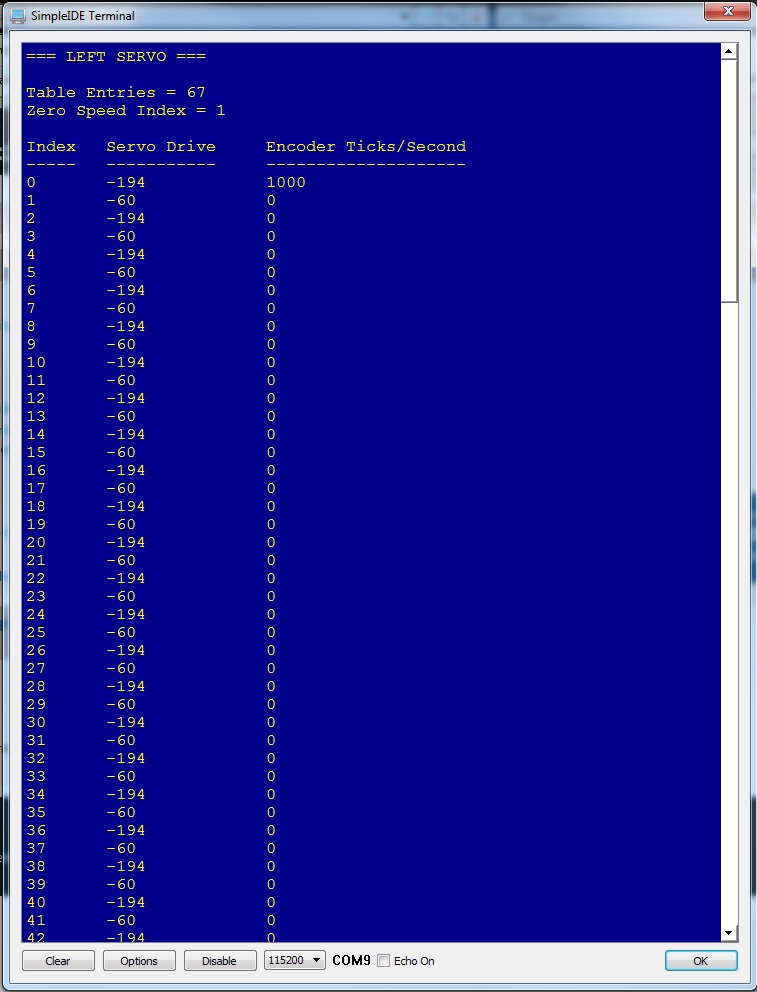
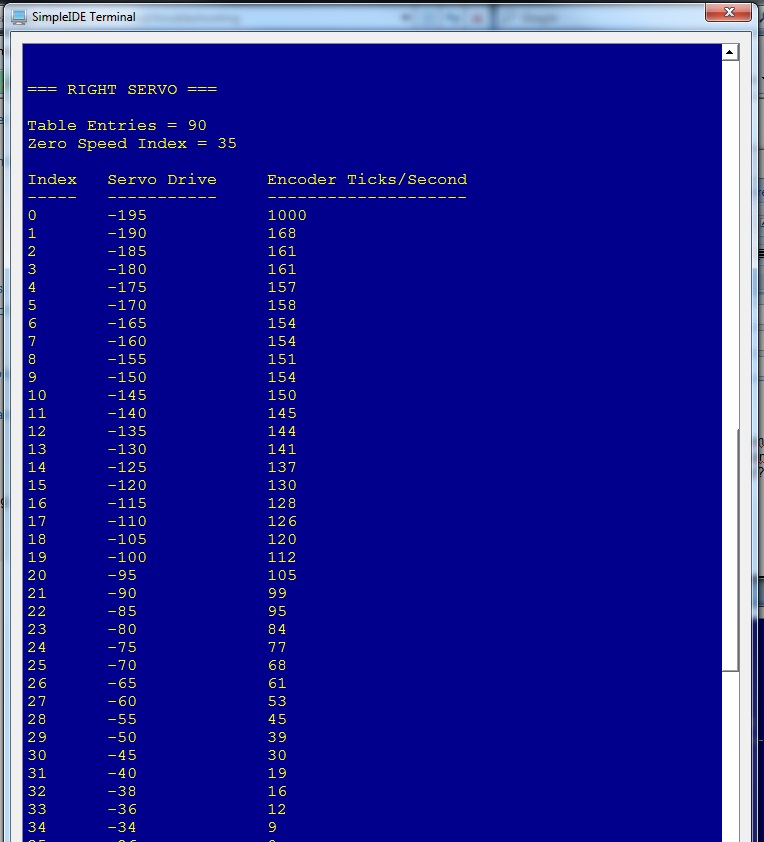
I did a re-calibration of my ActivityBot for some measurements. After that calibration the robot only moved very randomely. I tried to figure out which problem occurs by reading the troubleshooting, but couldn´t find any solution. When I did the Interpolation I had the following results for both servos.
Could someone please tell me what to do, and how to solve this probelm!?
Thank you very much in advance!
I did a re-calibration of my ActivityBot for some measurements. After that calibration the robot only moved very randomely. I tried to figure out which problem occurs by reading the troubleshooting, but couldn´t find any solution. When I did the Interpolation I had the following results for both servos.
Could someone please tell me what to do, and how to solve this probelm!?
Thank you very much in advance!
757 x 992 - 131K
764 x 842 - 115K
Comments
If that doesn't work, though it's a hassle, you might swap the left and right encoders (wiring only, not physically) to make sure you don't now have a bad sensor.
(For others reading the thread, this is the ActivityBot Troubleshooting page: http://learn.parallax.com/activitybot/troubleshooting)
Gordon is right, this could be a bad left encoder. Andy Lindsay, the ActivityBot guy, will join the thread in a little bit with some specifics on how to verify that.
Here is a program you can use to test encoder functionality.
#include "simpletools.h" int main() { low(26); low(27); while(1) { set_output(26, input(14)); set_output(27, input(15)); } }Use the Load EEPROM & Run button, and after it's loaded, set your ActivityBot's PWR switch to 2. Then, gently turn the right wheel (closest to PWR switch). Monitor the P27 light as you turn the wheel. It should turn on/off as the wheel's spokes/windows pass by the encoder.
Repeat for the left wheel (closer tot he servo ports), and observe the response of the P26 LED. Here are some conditions that it can indicate indicate:
P26 Light stays off while turning wheel:
- 3-wire cable to P14 in backwards
- 20 k resistor not making contact at either P14 or 3.3 V
P27 Light blinks while wheel turning
- Probably not your problem based on calibration display, but it would indicate the encoder cables are swapped. In other words, if this were the symptom, the cable that should be plugged into P14 is plugged into P15 and vice versa.
P26 Light stays on while turning wheel:
- Resistor across P14 -> 3.3 V is too small. It should be 20 k (red-black-orange-gold)
P26 Light on most of time, but occasionally flickering off, but not in sync with spokes passing by as you turn the wheel:
- For certain encoder vintages, if assembled while pressing the encoder bracket and servo toward each other, the encoder can end up seeing too much of the rim instead of the spokes. Easily corrected by loosening the servo screws slightly, then re-tighten while at the same time lightly pulling the encoder bracket and servo away from each other.
As Gordon pointed out, check your wiring. Make sure all connections are complete, color codes correct. Also make sure the mounting screws have not come loose. I recommend using the nylon locknuts in the kit to make sure they stay tight.
Please keep us posted.
Thanks, Andy
I rechecked the wires, did the test of the encoders but everything was fine. When turning the wheels the lights turned on and off as you desribed it (P27 for right, P26 for left)
I recognized just another thing, that when I put the switch on position 1 the two lights (P26/27) turn on and just turn off when I load something via Load EEPROM+Run button.
Any new idea which component could be bad?
Thanks!
#include "simpletools.h" #include "servo.h"
int main()
{
servo_speed(12,50);
pause(500);
servo_speed(12,100);
pause(500);
servo_speed(12,200);
pause(500);
servo_stop();
}
For the servo on the right side (P13) I could see that the speed ramped up, at the left servo (P12) the speed was the same for all the time - does this mean that the left servo is bad? Or is there some issue with the software?
IMPORTANT: This post will not fix the problem. Skip to the next post, that has the solution.
Not sure yet. I'd like to check first and make sure the servo's potentiometer is correctly adjusted.
Do not disconnect or reconnect any wires while you are doing this.
(0) Set PWR switch to 0
(1) Remove batteries
(2) Remove battery pack
(3) Unscrew and remove left servo wheel.
(4) Remove screws hold encoder and servo to chassis.
(5) Take servo out
(6) Load battery pack then set PWR switch to 2
(7) Run code below
(8) Find hole in servo case near cable
(9) Use your parallax screwdriver to gently turn the screw in the case. As you turn the screw back and forth, the servo should slow, change direction, and speed up in the opposite direction. Adjust the screw so that it's right in between directions, either moving very slowly or completely stopped.
(10) PWR switch to 0 and remove batteries again.
(11) Put everything back together.
(12) Re run ActivityBot Calibrate.side using the Load EEPROM & Run button and PWR switch to 2. Make sure to wait for the lights to go off before disconnecting power and returning to your computer.
(13) Re run ActivityBot Display Calibration.side using the Run with Terminal button.
(14) Shade and copy the SimpleIDE terminal output and paste it here (or do the pictures like you did before).
The left servo cable should be plugged into P12 and the left encoder should be plugged into P14.
Based on your display in the first post, those two are swapped, with the servo plugged into P14 and the encoder plugged into P12.
So, first step would be to correct that, and then re-run calibration and calibration display.
That should also correct the servo speed problems you are seeing, but if not, try the post above.
But when I adjusted the little screw I received the following results, which look quite familiar to the one posted in the tutorial:
Thanks so much for your help!!!
=== LEFT SERVO ===
Table Entries = 89
Zero Speed Index = 45
Index Servo Drive Encoder Ticks/Second
0 -194 1000
1 -189 160
2 -184 154
3 -179 158
4 -174 158
5 -169 158
6 -164 158
7 -159 155
8 -154 158
9 -149 158
10 -144 154
11 -139 158
12 -134 155
13 -129 149
14 -124 152
15 -119 150
16 -114 153
17 -109 150
18 -104 149
19 -99 145
20 -94 146
21 -89 143
22 -84 143
23 -79 139
24 -74 136
25 -69 131
26 -64 130
27 -59 120
28 -54 119
29 -49 112
30 -44 105
31 -39 98
32 -34 92
33 -29 83
34 -24 76
35 -19 68
36 -14 58
37 -9 50
38 -4 42
39 1 34
40 6 26
41 11 16
42 13 14
43 15 10
44 17 7
45 25 0
46 33 9
47 35 13
48 37 17
49 39 21
50 44 30
51 49 39
52 54 47
53 59 55
54 64 65
55 69 73
56 74 82
57 79 87
58 84 95
59 89 101
60 94 106
61 99 114
62 104 115
63 109 125
64 114 126
65 119 132
66 124 133
67 129 133
68 134 138
69 139 140
70 144 141
71 149 145
72 154 143
73 159 145
74 164 151
75 169 152
76 174 154
77 179 151
78 184 152
79 189 148
80 194 145
81 199 149
82 204 149
83 179 151
84 184 152
85 189 148
86 194 145
87 199 149
88 204 1000
=== RIGHT SERVO ===
Table Entries = 89
Zero Speed Index = 45
Index Servo Drive Encoder Ticks/Second
0 -195 1000
1 -190 157
2 -185 157
3 -180 162
4 -175 162
5 -170 157
6 -165 160
7 -160 155
8 -155 157
9 -150 155
10 -145 157
11 -140 160
12 -135 153
13 -130 155
14 -125 157
15 -120 157
16 -115 152
17 -110 153
18 -105 149
19 -100 146
20 -95 147
21 -90 145
22 -85 141
23 -80 141
24 -75 138
25 -70 131
26 -65 124
27 -60 124
28 -55 118
29 -50 108
30 -45 105
31 -40 99
32 -35 90
33 -30 81
34 -25 75
35 -20 66
36 -15 59
37 -10 51
38 -5 42
39 0 35
40 5 29
41 10 19
42 12 15
43 14 11
44 16 6
45 25 0
46 34 9
47 36 13
48 38 17
49 40 21
50 45 31
51 50 40
52 55 49
53 60 59
54 65 65
55 70 75
56 75 81
57 80 89
58 85 96
59 90 102
60 95 108
61 100 115
62 105 119
63 110 119
64 115 122
65 120 127
66 125 130
67 130 138
68 135 142
69 140 141
70 145 143
71 150 144
72 155 149
73 160 150
74 165 146
75 170 147
76 175 152
77 180 155
78 185 155
79 190 150
80 195 152
81 200 152
82 170 147
83 175 152
84 180 155
85 185 155
86 190 150
87 195 152
88 200 1000
Andy
http://forums.parallax.com/showthread.php/150281-Activity-Bot-mechanical-assembly-step-7-amp-8-heads-up?p=1207624#post1207624