

Basic Stamp tracked robot.
 DavidNyman
Posts: 52
DavidNyman
Posts: 52
A pair of tracked bots. Both carry the super carrier board. I chose Faulhaber motors rated at 9vdc. All the aluminum is cnc'd. I'll be adding xbee's to make them remote control.
1024 x 1024 - 134K
1024 x 1024 - 137K
Comments
Interesting treads. Where did you find those?
Any chance of getting some pictures of the tread mechanism and the motors?
Have you had a chance to test drive them yet? I have a Rover 5 with threads and it took a bit of experimentation (and hints from erco) in order to keep the threads from coming off. Do you know if the treads you're using are prone to slipping off their drive wheels?
I look forward to seeing the robots in action.
Thank you!
The tracks and sprockets are Lego. I'm machining my own sprockets today so that will soon change. No problems with the tracks slipping off yet. The prototype did quite well.
I really enjoy working with tracks.
Here's a few pictures of recent robots I've built with tracks.
All use BS2s from Parallax. I have a Propeller disability but I'm trying!
Here's a picture of the inner workings of each track module.
I had to use the original Lego sprocket/wheel in the drive position. I changed to two Delrin wheels in the two idler positions. The idlers are 1.200 diameter with .1875 holes drilled through. I used steel pins as axles riding on .1875 x .3125 bearings. The drive wheel has been bored to .3125, then I turned a brass arbor for a press fit into the drive bore. I knurled the arbor for a good fit into the bore. The arbor has been drilled to 3mm to fit the motor shaft. I changed out the motors on this particular bot to low cost 6v 60 RPM units as a prototype for future units that cost less to build. They seem to work as good as the more expensive Faulhaber motors I used in the twin bot.
The whole idea was to keep the bot very low so it can drive under things easily. Right now I'm trying to find a motor controller that has a small foot print and uses an RC signal. I've used the DRV8833 dual motor driver with great success in the past. The down side is it does tie up 4 I/O lines vs 2 for the RC format. I plan to use ServoPals with the RC signal so the Basic Stamp can "set and forget" the drive command until it needs changing. This is a great way to keep the bot rolling while the Stamp does other things. I've also bought one of those cheap spy cameras to mount to the front of the bot. I'll snap more pictures as the build progresses. I plan to remote control the bot with an Xbee.
The track plates are just about beyond the prototype stage. As you can see in the picture, I forgot to make a finish pass on the main pocket. I will program a finish pass for the next batch I make. The aluminum is basic 6061 and I can cut 4 pieces out of one piece of .25 4"x12". Two holes are bored for the bearings and one for the motor. There's also a screw pattern on the inside plate for the motor.
The main plate is Mic-6 and has had a pocket cut to keep the weight down. I also programmed the mount holes for the BS carrier board.
I just noticed from the pictures the twin still has the Lego axles, those will change when I make Delrin wheels for this bot as well
Amanda
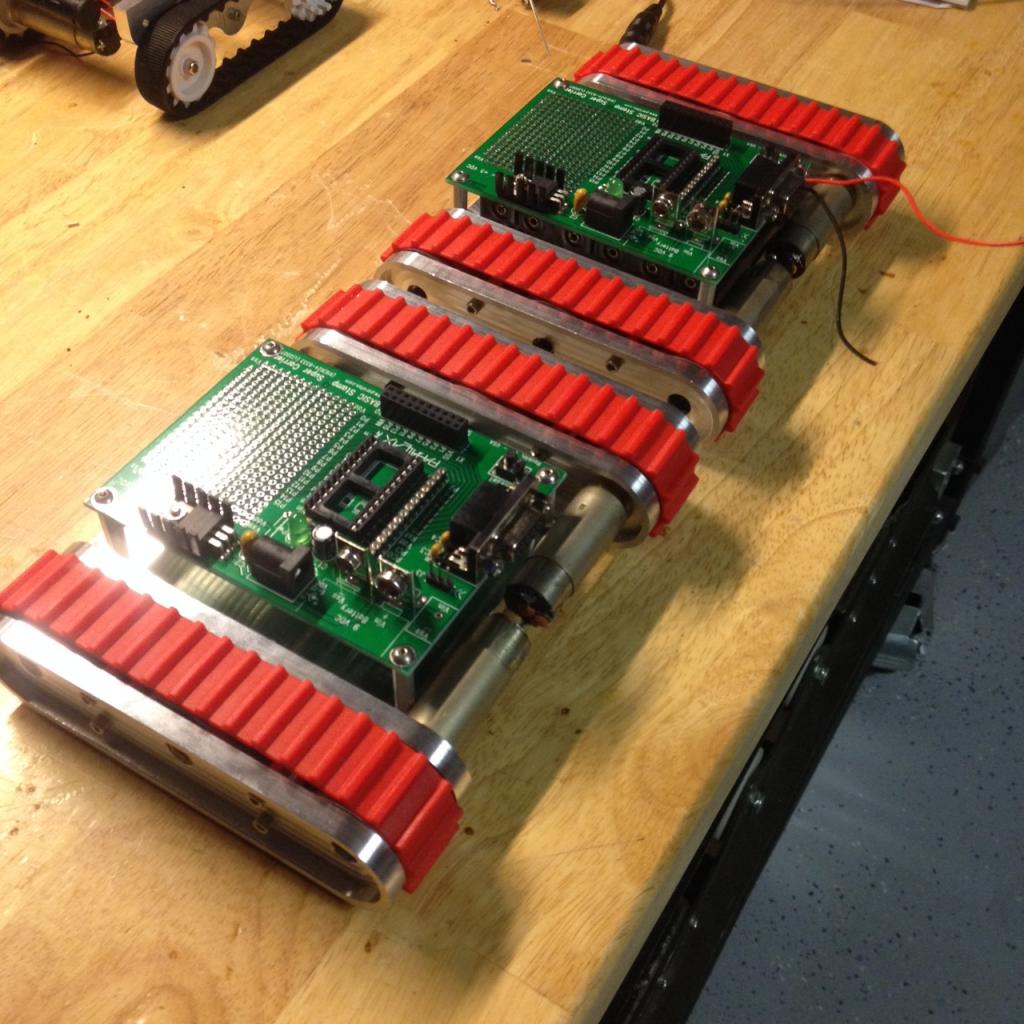
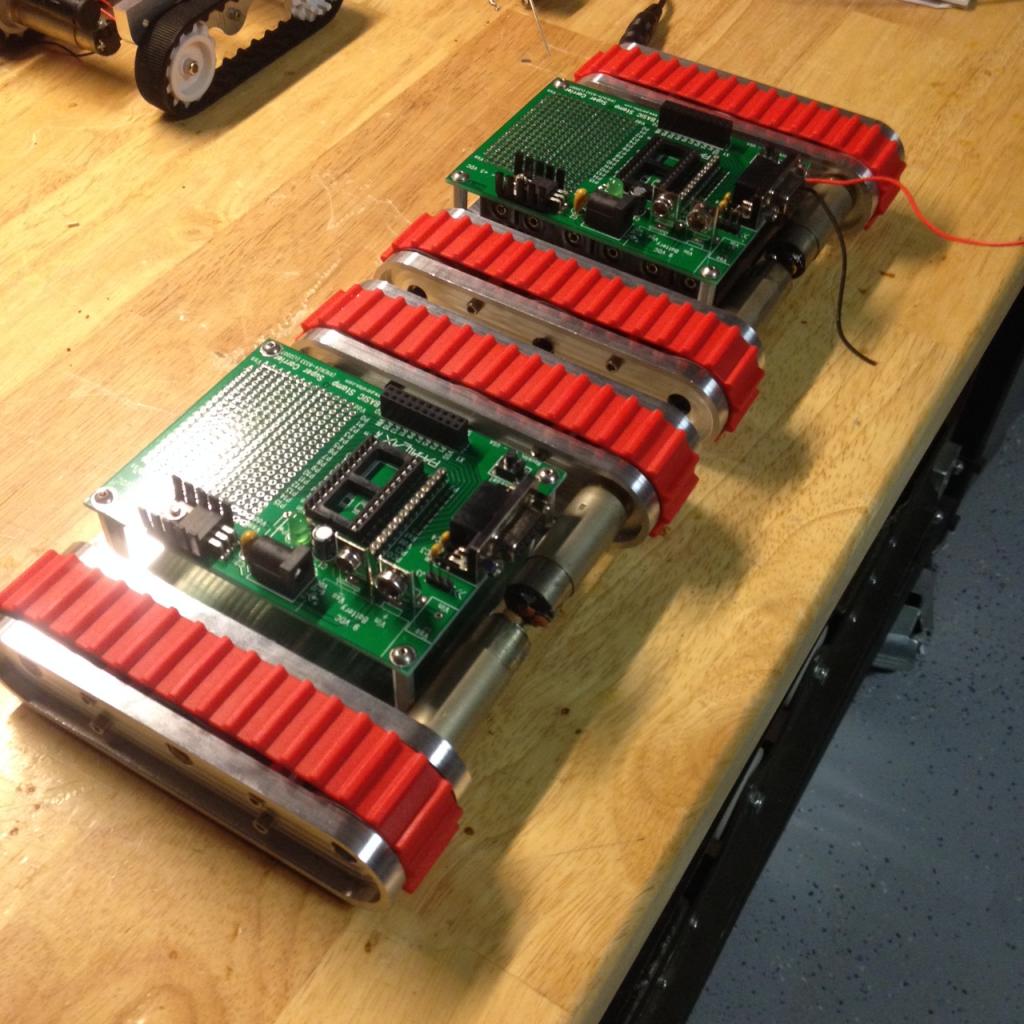
Here's a picture or two of one of the twins almost complete. I've added the Xbee and ultra sonic sensor as well as the servopal. The two motor controllers were added, programmed and are working well. The bot sends distance data as well as an audible tone back to my controller telling me when I get close to an object. The last addition will be a tiny camera and transmitter I purchased to "drive" the bot around from FPV.
I machined and added the bumper yesterday.
I've gotta do something with that darn off/on switch!
http://www.youtube.com/watch?v=OQn5SD7UQgw
Your work is really nice. It shows that you take pride in your work. I would like to develop a tracked rover someday myself. Regarding your new camera, could you provide details and comments on what you have obtained? I am looking for one for my rover-in-progress and yours may be of interest. Thank you.
Here's a picture of the unit I purchased from ebay. I'm sure the range will be very short as the whole thing cost only about $24 from a China seller. I've plugged it in and while the IR leds don't seem to do anything, the camera itself transmits nicely. Freq is 900-1200 MHz on my unit but I've seen the same unit at 2.4 Ghz for around the same price. I've got much more powerful video transmitters but they are quite a bit bigger and draw more current. The pictured unit works great off of a 9v battery. Given my 6 double A battery power source, the camera should work fine.
The small 144:1 Faulhaber motors offer surprising torque. The versions I selected are 9 vdc units and work great with my motor controllers.
I bought a set along with some 4 pole wheel chair motors. Not sure if I'll ever get around to building anything with them though. I bought the tracks from the longer wheelbase Honda snowblower, they are huge!
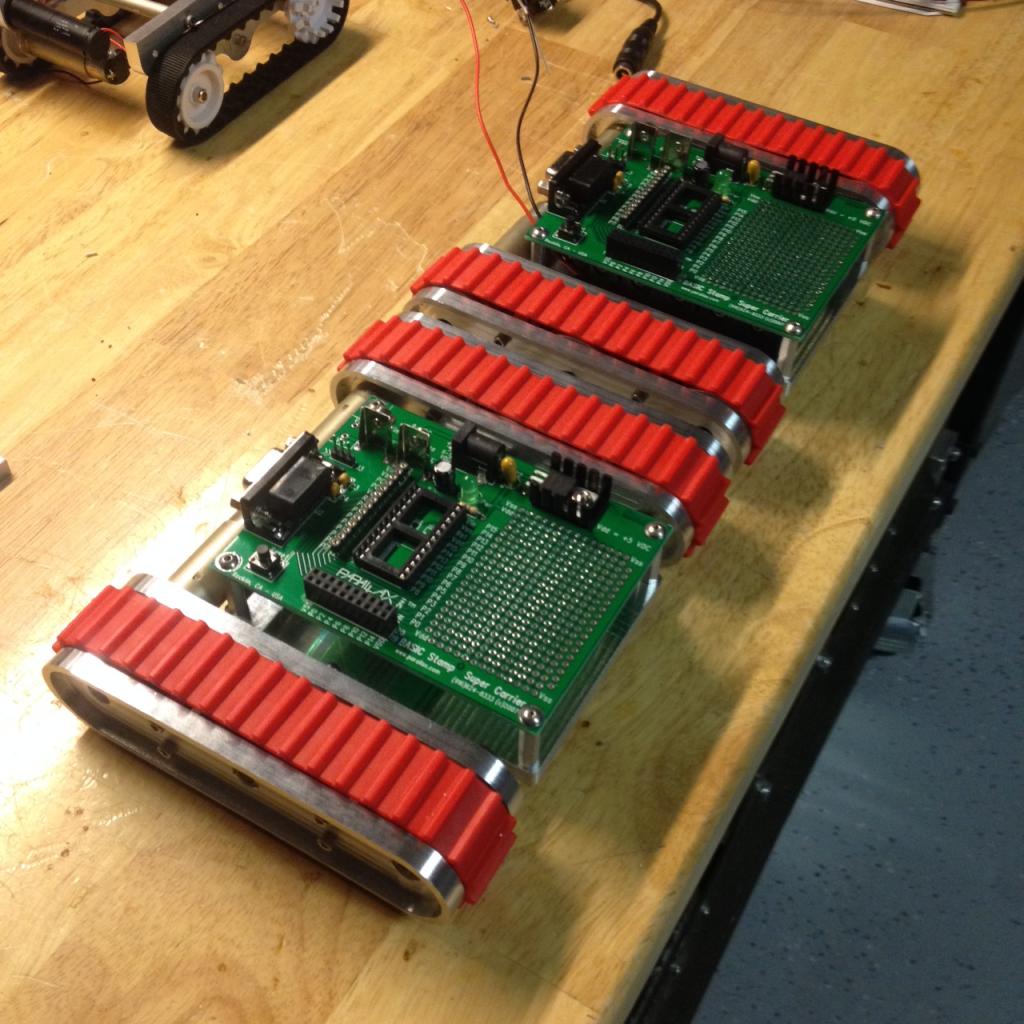
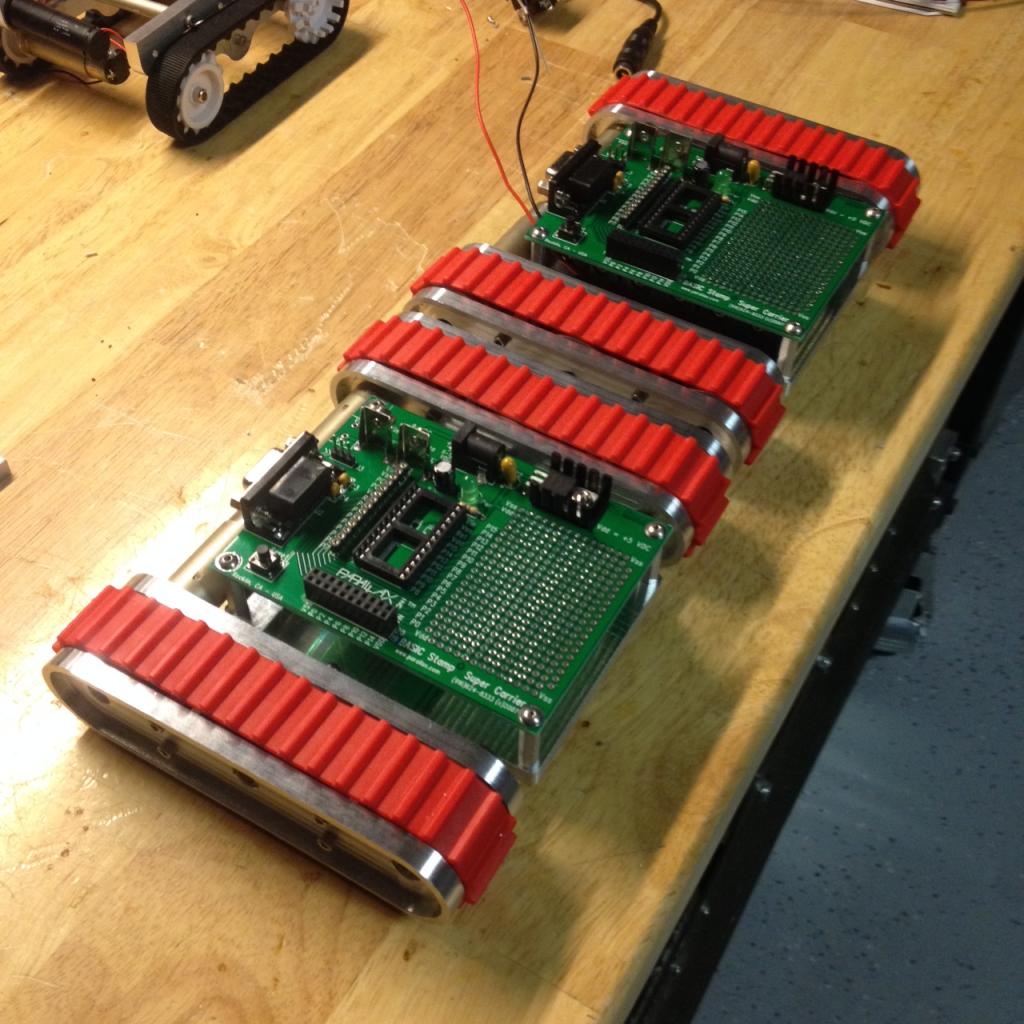
There was an arrival to the group today. I can't call them twins anymore. lol
I changed the first bot to a ratio of 262:1 which offers tons of torque but the speed leaves something to be desired. The bot chassis I finished today (the middle one) uses the 141:1 which seems to work much better. I think I'll go back and change the finished bot back to that ratio. The last bot in the picture uses the cheap 60 RPM motors from ebay. At $6 a piece I had to give them a try. I'll post performance on those later.
BTW, we builders have a tradition of doing demo videos of our various bots doing a simple figure 8. Feel free to jump in. I can't recall if we've had a treaded bot yet. http://forums.parallax.com/showthread.php/138125-Erco-s-Figure-Eight-Challenge
Here's a recent set of tracks I made using a Delrin like material: