

Eddie - Connections IR / US / Encoders/Motors problem
 goupil35000
Posts: 10
goupil35000
Posts: 10
Hello,
I have 2 eddie platforms and I'm impatient to test them. But I have some questions before switching on.
1/ Connections IR / US / Encoders
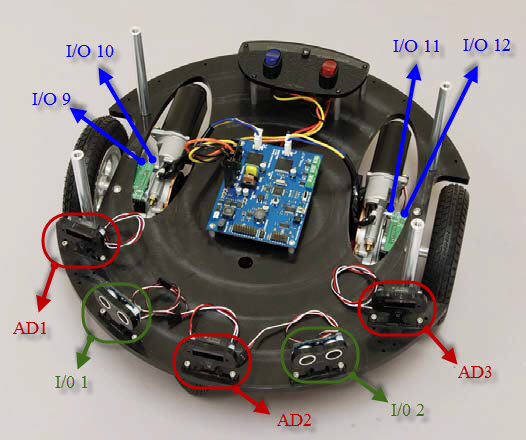
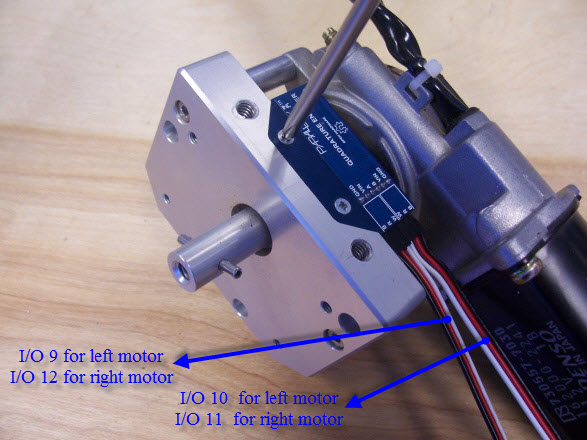
When reading "28990-28992-Eddie-Robot-Platform-v1.3.pdf" (top of page 13), I think the good connections are these (see pictures).
I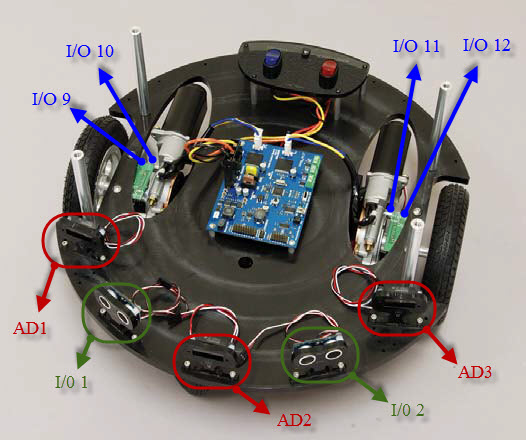
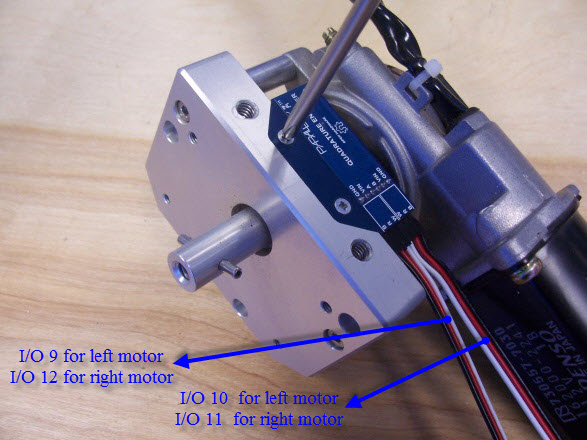 (photo from 27971-Motor-Mount-Wheel-Kit-Guide-v2.0.pdf)
(photo from 27971-Motor-Mount-Wheel-Kit-Guide-v2.0.pdf)
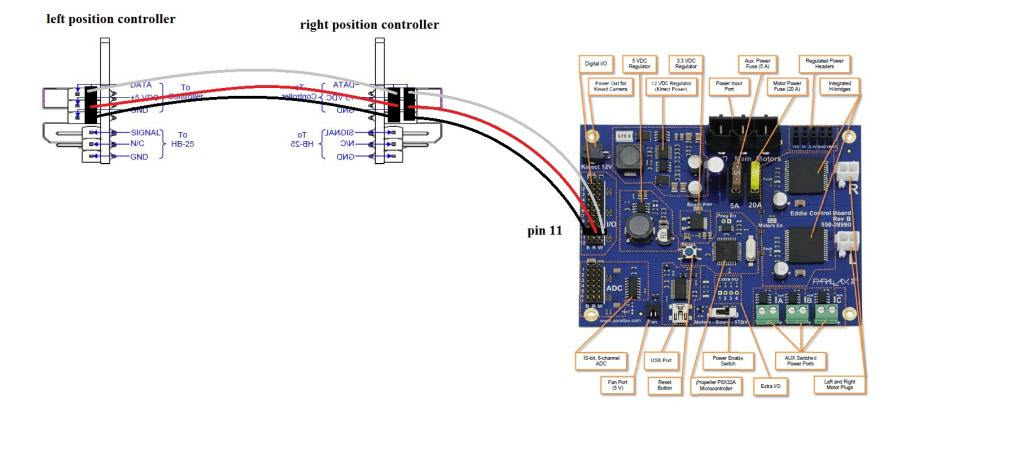
But when I read this forum, I saw Jessica Uelmen agrees this connection below is right (in thread "Problem of Eddie Robot Platform and Reading Encoder Data"Started by John ,Lin, 09-12-2013 07:26 AM,).
What are the good connections to begin -- I understand that there are 2 encoders, one with 90° offset -- ? If I look at the first picture on the right motor, it seems that there is only one connector -- and in my kit I have only 2 connectors of 3 pins for this (+2 others 3 pins connector for US).
2/ Motors
When reading this forum, it seems that at least one guy had problem with motors. When motors are switched off, can I turn them by hand or are they blocked ?
Thanks for reading until here ... and to give me good answers . Hope this will help others who begin with this robot ...
. Hope this will help others who begin with this robot ...
PS: my encoders are the blue ones.
I have 2 eddie platforms and I'm impatient to test them. But I have some questions before switching on.
1/ Connections IR / US / Encoders
When reading "28990-28992-Eddie-Robot-Platform-v1.3.pdf" (top of page 13), I think the good connections are these (see pictures).
I
But when I read this forum, I saw Jessica Uelmen agrees this connection below is right (in thread "Problem of Eddie Robot Platform and Reading Encoder Data"Started by John ,Lin, 09-12-2013 07:26 AM,).
What are the good connections to begin -- I understand that there are 2 encoders, one with 90° offset -- ? If I look at the first picture on the right motor, it seems that there is only one connector -- and in my kit I have only 2 connectors of 3 pins for this (+2 others 3 pins connector for US).
2/ Motors
When reading this forum, it seems that at least one guy had problem with motors. When motors are switched off, can I turn them by hand or are they blocked ?
Thanks for reading until here ... and to give me good answers
PS: my encoders are the blue ones.
526 x 440 - 63K
587 x 440 - 70K
1024 x 467 - 70K
Comments
Thanks.
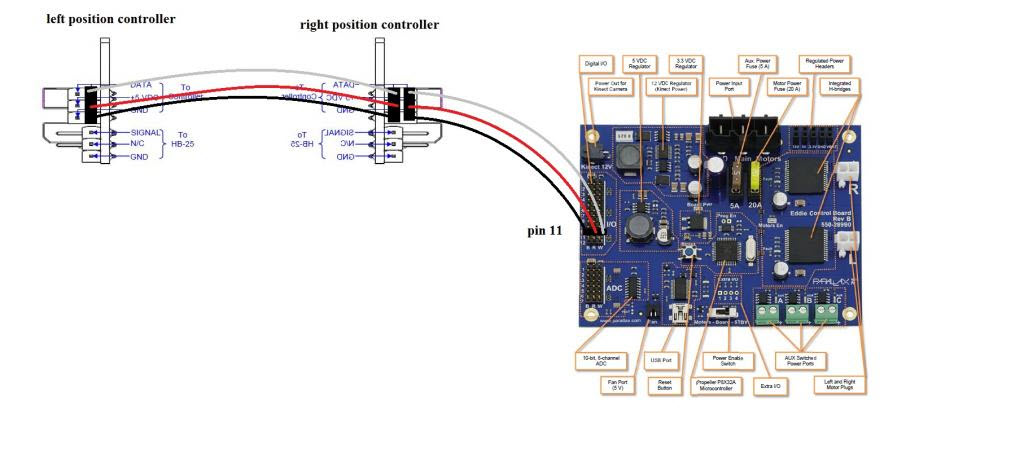
Later on there was a new quadrature encoder board that had higher resolution encoders and provided the raw quadrature output. It looks like these are the ones you probably have. Those are connected differently. There should be something in the Parallax docs for Eddie that shows how the new versions connect. Also, since the Eddie board supports a couple different encoder options there are two different versions of the firmware and you'll need to load the one that matches your encoder configuration. I believe the latest version supports the hi-res encoders like the ones you have. You could also look at the source code for that to determine what IO pins to connect the encoders to. The newer encoders would connect directly to the Eddie board.
Robert
this took me a while to figure out... rookie mistake ...
Anyway, the proper way to hook it up, is as show in the following photo:
Hope this clears up some thing for other people as well..
Have fun,
jack