

Two Wheelin'

A late night recollection of an old Popular Mechanics article about a huge two wheeled machine designed to work in logging operations (Never built to my knowledge) led me to wondering about the possibility of building a functional two wheel robot. I looked at a couple of configurations and finalized on Wilson:
Attachment not found.Attachment not found.
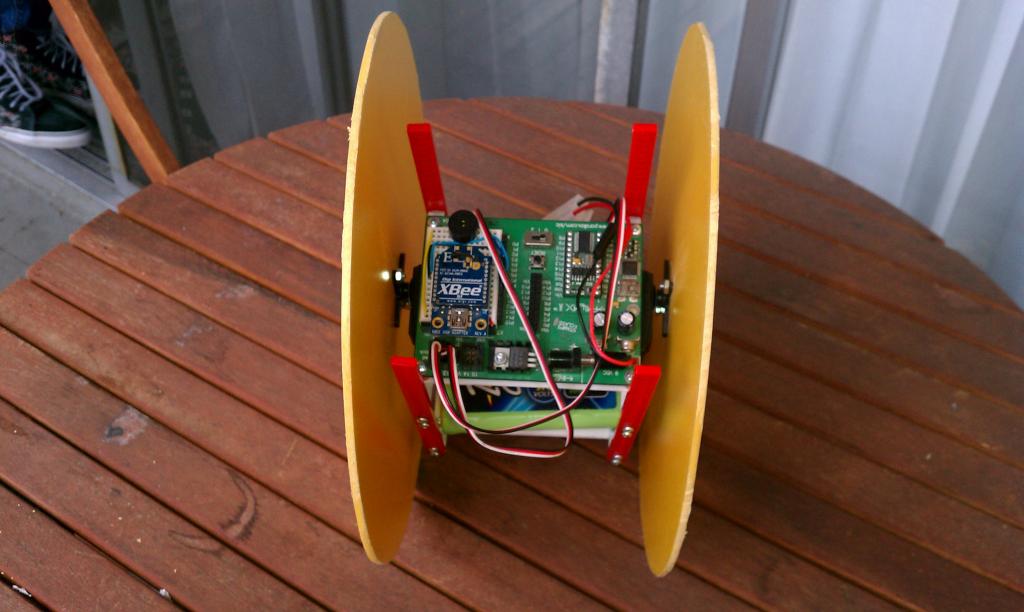
Differential steering of course. 10 inch wheels made from 1/8" expanded PVC driven by Parallax CR servos. Communication via series 1 Xbees. Controlled with a Homework board with Xbee and a Memsic 2125 accelerometer using the software for the Tilt Controlled SumoBot. The low mounted battery provides a counter balance so the torque of the servos turns the wheels rather than spin the center assembly. The large wheels make Wilson a lot faster than the BoeBot (almost 4 times faster) so steering is kinda tricky. (I can fix this in the code but haven't gotten to it yet.)
My roommate shot this video of me playing with Wilson right after getting him running:
http://www.flickr.com/photos/81065424@N00/9120981221/
As Wilson trundles about the house, his center assembly swings back and forth a "lot". I "think" I can add a ServoPal to take some load off the Stamp and an AppMod Breadboard with an accelerometer to the the 'Bot side to try to reduce some of the oscillation. 'Sounds' like a plan anyway! :-)
There! That's my weekend time-wasting project.
Amanda
PS And yes erco... I'm gonna attempt a figure eight when I get a bit more practice.
Edit: Playing with the little beastie later last evening, I found that if he encounters something he can't roll over or through, the servos provide enough torque to rotate the center cage over and over. Probably not an ideal condition, but kinda funny to watch! Try =that= with your BoeBot!
Edit 2: Finding that slow and easy works the best, otherwise he's just too fast to control with any accuracy. Also, with the large wheels, it takes much less tilt with the hand control to get yourself into trouble. Lastly, I've had to re-caibrate the right servo twice... it keeps starting to drift a bit making navigation more difficult.
Attachment not found.Attachment not found.
Differential steering of course. 10 inch wheels made from 1/8" expanded PVC driven by Parallax CR servos. Communication via series 1 Xbees. Controlled with a Homework board with Xbee and a Memsic 2125 accelerometer using the software for the Tilt Controlled SumoBot. The low mounted battery provides a counter balance so the torque of the servos turns the wheels rather than spin the center assembly. The large wheels make Wilson a lot faster than the BoeBot (almost 4 times faster) so steering is kinda tricky. (I can fix this in the code but haven't gotten to it yet.)
My roommate shot this video of me playing with Wilson right after getting him running:
http://www.flickr.com/photos/81065424@N00/9120981221/
As Wilson trundles about the house, his center assembly swings back and forth a "lot". I "think" I can add a ServoPal to take some load off the Stamp and an AppMod Breadboard with an accelerometer to the the 'Bot side to try to reduce some of the oscillation. 'Sounds' like a plan anyway! :-)
There! That's my weekend time-wasting project.
Amanda
PS And yes erco... I'm gonna attempt a figure eight when I get a bit more practice.
Edit: Playing with the little beastie later last evening, I found that if he encounters something he can't roll over or through, the servos provide enough torque to rotate the center cage over and over. Probably not an ideal condition, but kinda funny to watch! Try =that= with your BoeBot!
Edit 2: Finding that slow and easy works the best, otherwise he's just too fast to control with any accuracy. Also, with the large wheels, it takes much less tilt with the hand control to get yourself into trouble. Lastly, I've had to re-caibrate the right servo twice... it keeps starting to drift a bit making navigation more difficult.

1024 x 612 - 58K
1024 x 612 - 68K
Comments
We bought a cat toy for my 2 year old grandson... a ball that spools around the house and has a tail. It can't hold a candle to Wilson. How about an impact sensor that causes random turns?
The cats will go wild and my grandson will love it... $29.95.
Rich
Casters are for suckers!.
-Tommy
Time for a crazy 8!
888888888888888888888888888888888888888888888888 !
Of course, you might only need one wheel.
Monowheel gerbiling is OK, anything else is strictly verboten!
I wonder if I can slap two giant wheels on a Boebot and video a figure 8 before Amanda does. The race is ON!
Lol! Been working that all morning. Not that any of my attempts have been film worthy so far... 'ceptn for comedic value. ;-) Have to get the tripod out of the basement to hold my camera. Hard enough steering using both hands on the controller... not =even= gonna try with a camera in one hand!!!!
Not too much else going on... assembling a new entertainment center then off to Chili's for a plate of Fajitas... and a Margarita!!! (I've -never- had a Margarita served in a beer stein before. Wow!) :-)
@
??? IIRC the Figure 8 challenge is all autonomous (pre-programmed), to show tracking accuracy and "return to origin". Otherwise, every T, D & Harry would be doing it with an R/C dune buggy! It's probably easier & more consistent than driving manually, too. Which leaves you 2 free hands to video!
My experience so far is that a pre-programmed route is ==way== easier! However, I built Wilson to be, first, radio controlled then I'll look at some sort of autonomous applications.
I've come close to a figure 8 in r/c mode... well if the description of the "8" could be really stretched. The top half of my "8" was kind of a warped oval (Which I was sorta proud of!), the bottom half could only be described as a rather bent heptakaidecagon. Following that Wilson made a lurch into one of the dinner plates and tipped over.
Yeah... I'll get to an autonomous eight, but first I gotta get a decent one with the remote control.
Amanda
Great idea Rick, but I'm rather worried about being busted for an RUI (Robotics Under the Influence). ;-)
Amanda
-MattG
Ted/Tread
Wilson/Wheelin
and some of Amanda's other descriptive robotic alliteration.
Alliterati?
In order to meet erco's "demands"
With that, here's Wilson 2-wheelin' an 8!
http://www.youtube.com/watch?v=JGC8-tyKZOQ&feature=youtu.be
Amanda
Wilson does a great 8! Having not done any, I am greatly impressed by all of you in the Great-8 club!
-Tommy
I think the original source of inspiration would be Michigan Logging Wheels.
Great project.
Here's the full description: http://theoldrobots.com/Robocycle.html