Cheap Stepper Based Robot - Spin Object
 Prophead100
Posts: 192
Prophead100
Posts: 192
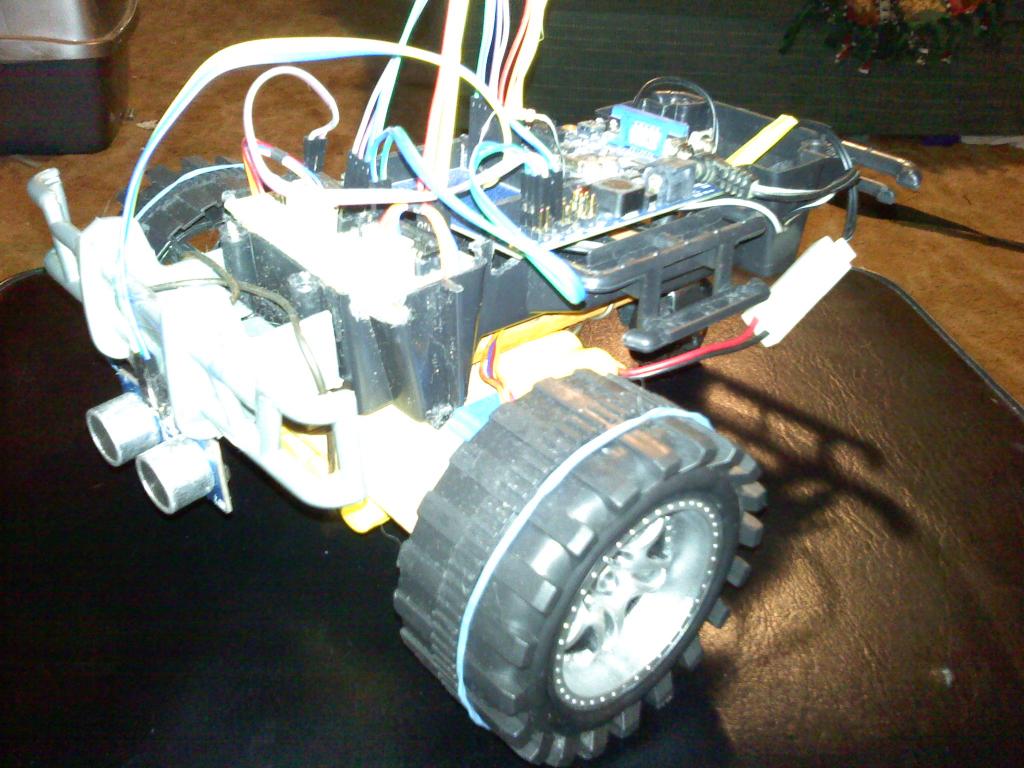
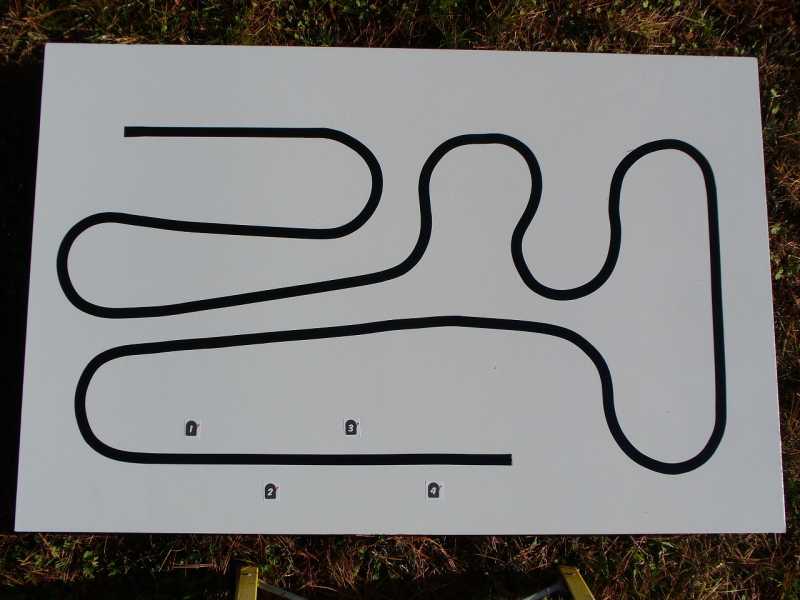
I completed a fairly basic robot using cheap stepper motors for line following, wandering collision avoidance and sequenced maneuvers. It launches separate cogs to control each motor and then synchronizes them for proportional steering using simple commands. You can change the stepper sequence on the fly from wave to full to half steps for difference needs of efficiency, precision and power. The line following algorithm uses a rule-set structure with case statements to react to various sensor situations. A ping sensor helps with collision avoidance, IR sensors allow line following and a SoundPal allows sounds to match.
If your interested in learning about robots with the propeller, you might want to try this as your learning and planning to scale up to faster and more powerful motors with more costly higher quality components, I posted the demo code and object on the OBEX at http://obex.parallax.com/object/576 (earlier versions were in other threads)
If your interested in learning about robots with the propeller, you might want to try this as your learning and planning to scale up to faster and more powerful motors with more costly higher quality components, I posted the demo code and object on the OBEX at http://obex.parallax.com/object/576 (earlier versions were in other threads)