

Any known possible interference?
 CircuitBurner
Posts: 21
CircuitBurner
Posts: 21
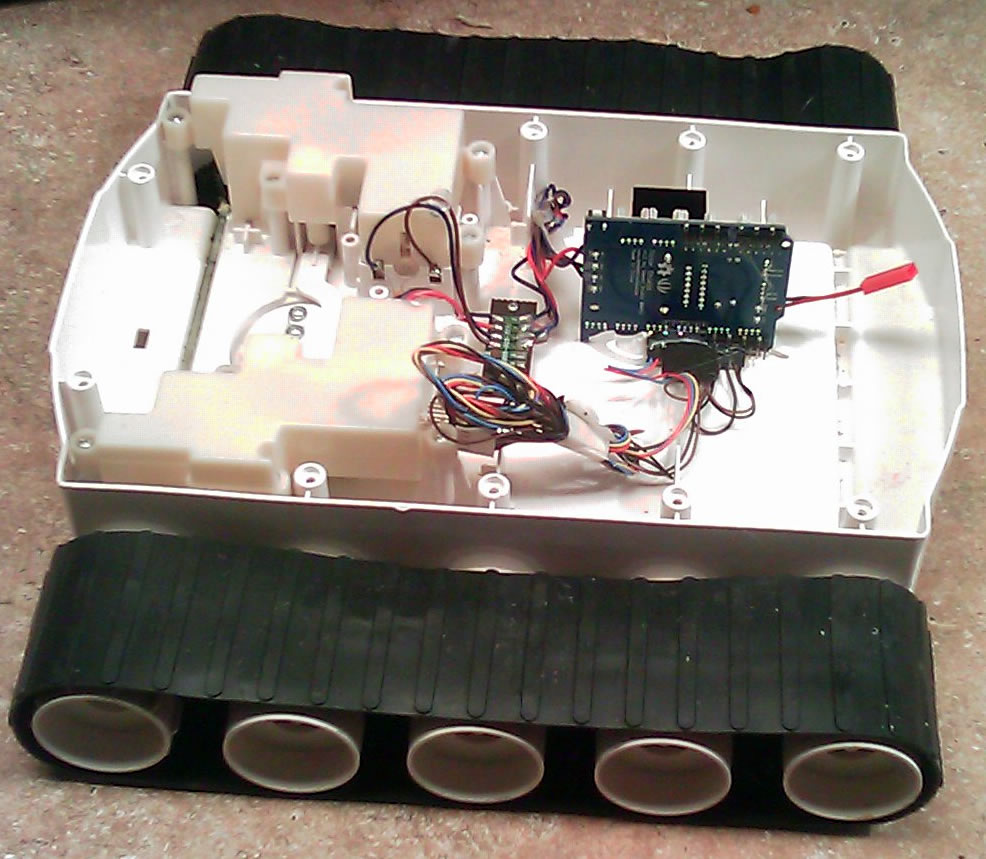
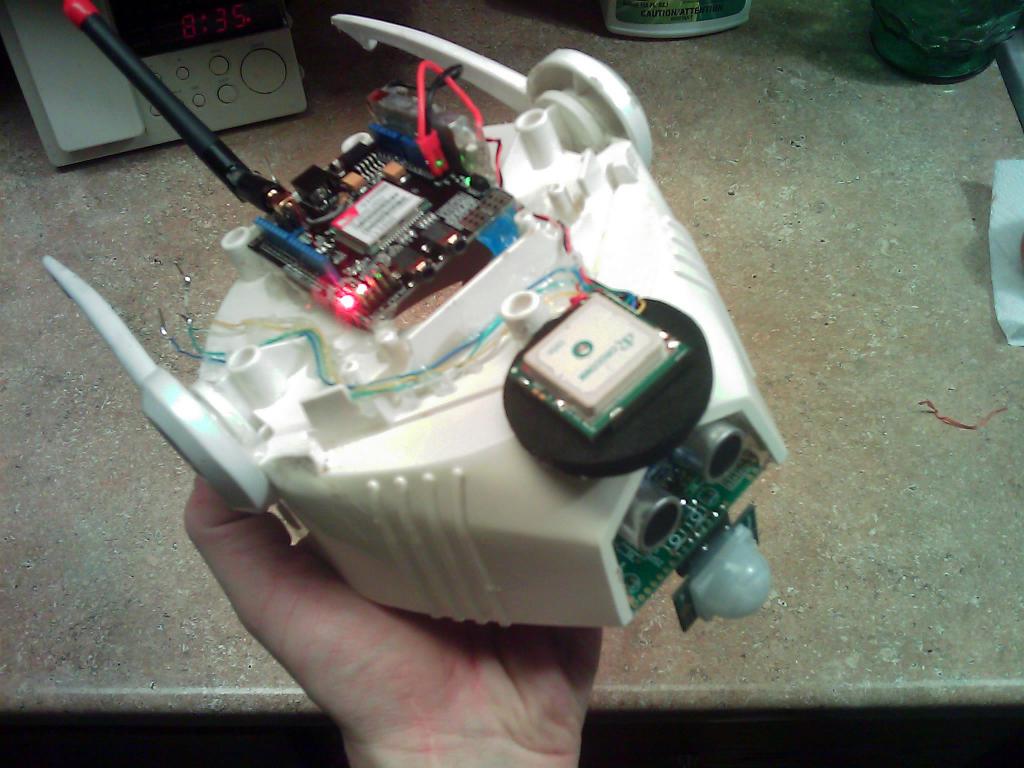
For my current integration project, (robotic automation conversion of a 1980's vintage toy robot) Ive purchased a number of Parallax sensor sub-systems for its sensory / navigation pod. (what used to be its static empty plastic head)
Inside this converted and modified shell that was the head, Ive utilized the roughly 12 cubic inches of space as well as possible.
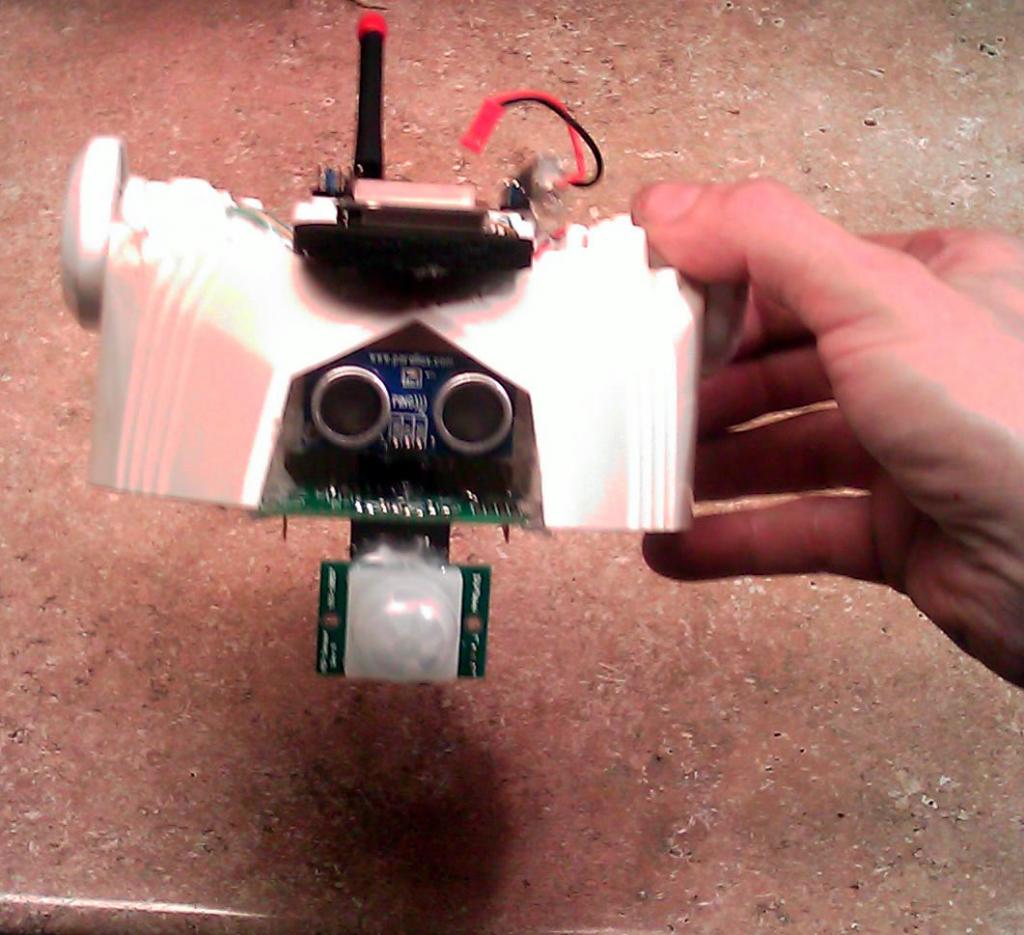
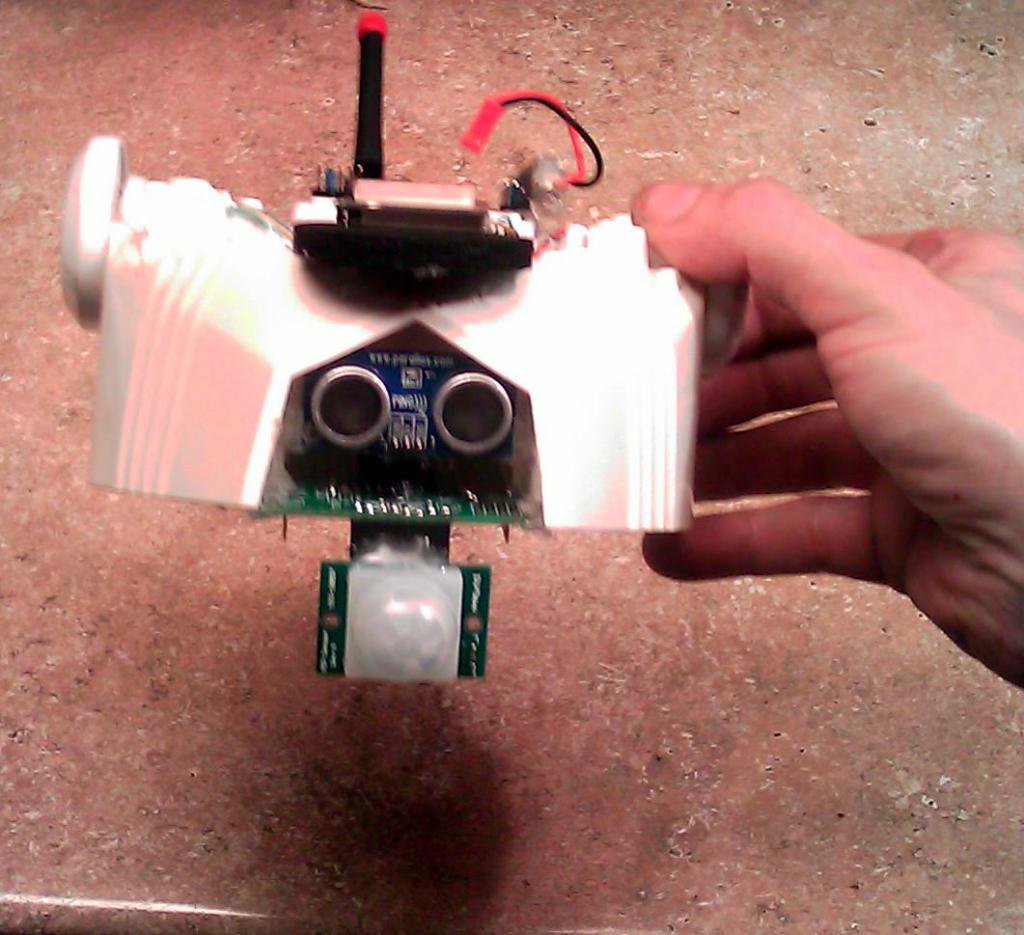
What my question concerns are any possible effects from close proximity of separate sensor subsystems without shielding between them.
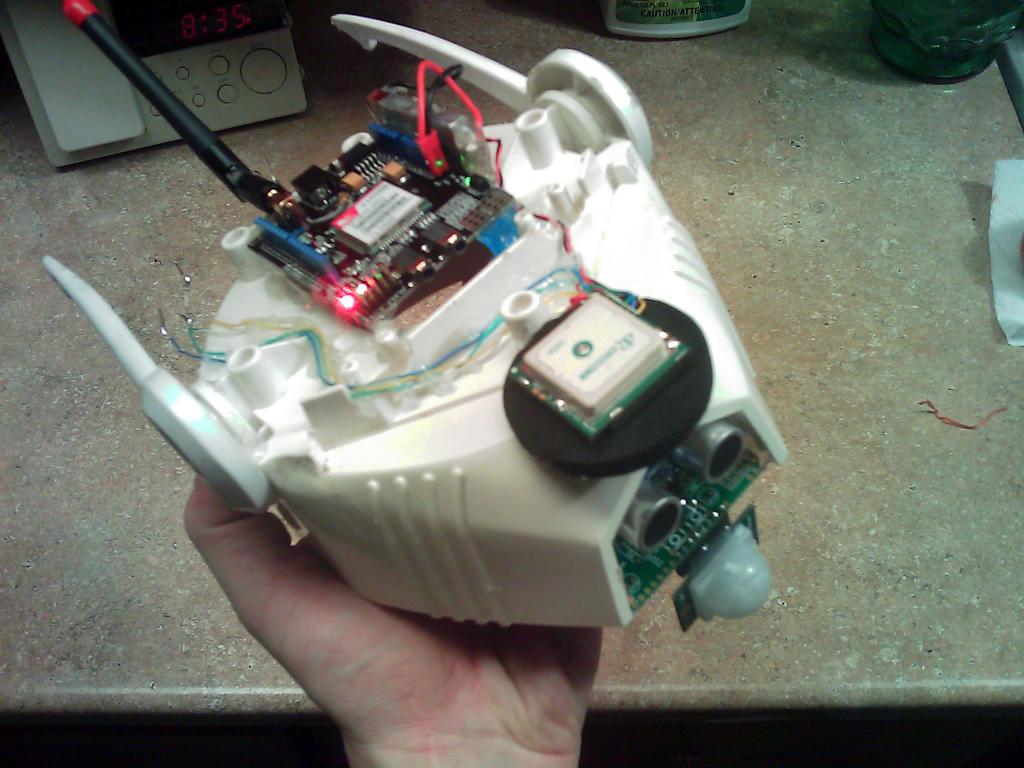
The inventory so far has a Parallax L3G4200D 3-axis gyroscope module, A parallax ping range finder unit, a parallax PMB-648 GPS module, a parallax 2-axis accelerometer chip, a parallax PIR sensor, and rounding out this inventory, is a Seeed-Studios GPRS tranceiver unit and whip antenna mounted in the upper region of its cranium shell. (as its redundant 2nd tier communication and command navigation back-up system---"why wont you come home, Robot??!!")
With the vast collective experience here, since this inventory of subsystems are mostly all from Parallax, does anyone reading this know of any apparently expected problems possible when using these devices closely mounted together with no shields?
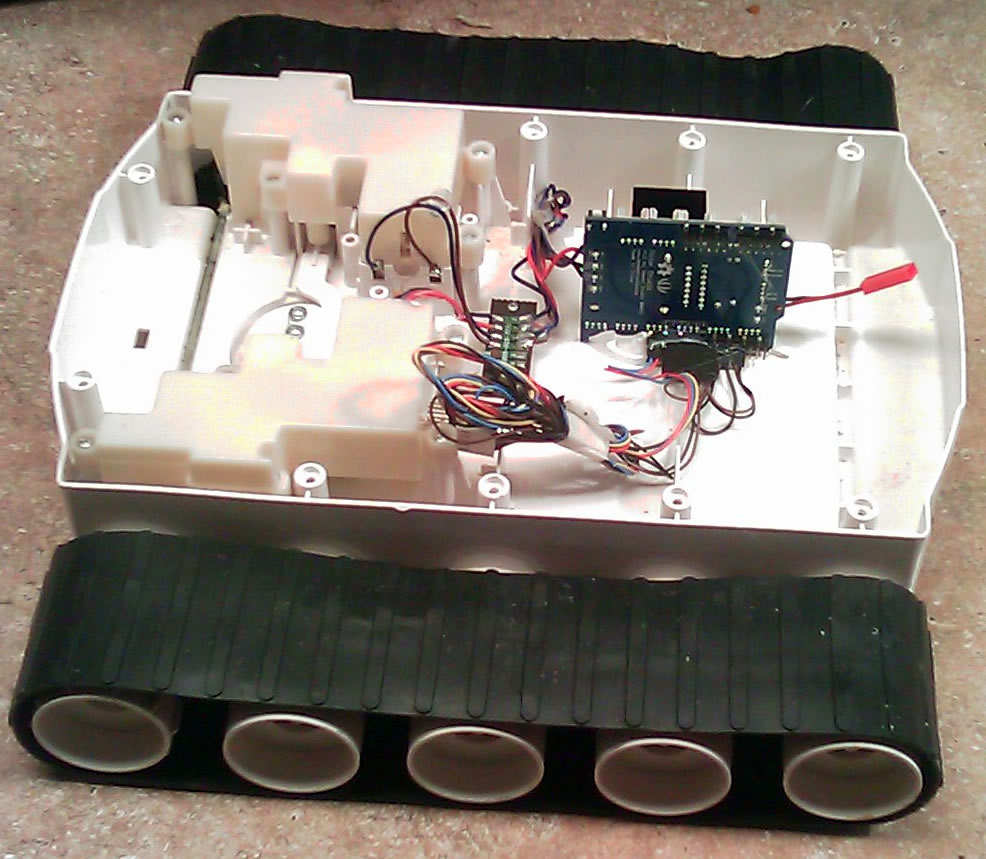
The power supply lines to each module are separate twisted pairs, and isolated/filtered to sensors that could be sensitive to supply line ripples...
Also, any communication lines carrying signals to the host micro-controller (Arduino mega 2560) or peripheral locations on either end of robot are also twisted pairs.
With this factored in, anything come to mind based on any of your experiences with these devices that I should consider?
Maybe I should mention the presence of a decent 8-ohm audio output speaker, and a microphone element connected to the Aux GPRS transceiver module, to allow full duplex conversations between robot operator and anyone the robot is engaging with. The GPRS max wattage output is under 1/2 of a watt.(0.45 watts) and as mentioned before, is the highest mounted device (top interior of cranial shell) on the robot.
thanks in advance if anyone knows potential problems from interaction between these things!
Inside this converted and modified shell that was the head, Ive utilized the roughly 12 cubic inches of space as well as possible.
What my question concerns are any possible effects from close proximity of separate sensor subsystems without shielding between them.
The inventory so far has a Parallax L3G4200D 3-axis gyroscope module, A parallax ping range finder unit, a parallax PMB-648 GPS module, a parallax 2-axis accelerometer chip, a parallax PIR sensor, and rounding out this inventory, is a Seeed-Studios GPRS tranceiver unit and whip antenna mounted in the upper region of its cranium shell. (as its redundant 2nd tier communication and command navigation back-up system---"why wont you come home, Robot??!!")
With the vast collective experience here, since this inventory of subsystems are mostly all from Parallax, does anyone reading this know of any apparently expected problems possible when using these devices closely mounted together with no shields?
The power supply lines to each module are separate twisted pairs, and isolated/filtered to sensors that could be sensitive to supply line ripples...
Also, any communication lines carrying signals to the host micro-controller (Arduino mega 2560) or peripheral locations on either end of robot are also twisted pairs.
With this factored in, anything come to mind based on any of your experiences with these devices that I should consider?
Maybe I should mention the presence of a decent 8-ohm audio output speaker, and a microphone element connected to the Aux GPRS transceiver module, to allow full duplex conversations between robot operator and anyone the robot is engaging with. The GPRS max wattage output is under 1/2 of a watt.(0.45 watts) and as mentioned before, is the highest mounted device (top interior of cranial shell) on the robot.
thanks in advance if anyone knows potential problems from interaction between these things!
Comments
In some cases, if you code the senors to operate in a round robin fashion, there is very little to be concerned with. But of course, the Propeller allows for simultaneous operation when you need the speed.
It really is impossible for every possible application and combination of items to be anticipated. But success rates seem reasonably high, and shielding seems very rare as a solution.
Now if you were building a radio transmitter, I'd be much more concerned with the lack of a good answer.