

OSEPP Gyroscope on Propeller I2C Bus
 waymond91
Posts: 15
waymond91
Posts: 15
Hey All!!
I am working at connecting some OSEPP brand sensors to propeller i2c bus. I have had success with the compass using one of the objects on obex (which confuses me because the i2c addresses don't correspond). I am fairly new to I2C, but I am always looking to understand the next layer.
The gyroscope uses the MPU3050 chip. Here is the register map for the chipset:
http://invensense.com/mems/gyro/documents/RM-MPU-3000A.pdf
Osepp also released an arduino code for the <wire> library. I know this works, I had it working on the arduino and later on the beaglebone. I would have put it in code tags, but I can't get the spacing write with a copy paste. Here is the link
http://osepp.com/learning-centre/start-here/gyroscope-sensor-module/
So I think I have something workable here. I have tried a bunch of different I2C objects without any success ( I also do enjoy poking around and trying to code as much as I can myself where possible). With a little help of existing libraries and a couple tutorials, I wrote this:
Here you can see what values I get when I print the received bytes from the data registers, and the calculated x-value:::
These are not usable values. They have no relevance to the motion of the sensor.
Any idea what I am doing wrong here all?? If I can get this working for gyroscope, I should be able to get it working for the accelerometer and compass as well. I will post what I work out here.
Also, has anyone been able to find some good I2C tutorials?? I have been dredging my way through, and bits and pieces are coming together. If I can get a better grasp I think it would be worth while to post a tutorial on instructables...
Anyway, let me know what you think!!
Thanks all!!
I am working at connecting some OSEPP brand sensors to propeller i2c bus. I have had success with the compass using one of the objects on obex (which confuses me because the i2c addresses don't correspond). I am fairly new to I2C, but I am always looking to understand the next layer.
The gyroscope uses the MPU3050 chip. Here is the register map for the chipset:
http://invensense.com/mems/gyro/documents/RM-MPU-3000A.pdf
Osepp also released an arduino code for the <wire> library. I know this works, I had it working on the arduino and later on the beaglebone. I would have put it in code tags, but I can't get the spacing write with a copy paste. Here is the link
http://osepp.com/learning-centre/start-here/gyroscope-sensor-module/
So I think I have something workable here. I have tried a bunch of different I2C objects without any success ( I also do enjoy poking around and trying to code as much as I can myself where possible). With a little help of existing libraries and a couple tutorials, I wrote this:
OBJ
pst : "Parallax Serial Terminal"
CON
_clkmode = xtal1 + pll16x
_clkfreq = 80_000_000
SDA = 29 ' SDA of gyro to pin P1
SCL = 28 ' SCL of gyro to pin P0
GYRO_ON = $68
GYRO_OFF = $69
VAR
long stack[8],x
PUB Main | count
waitcnt(clkfreq/100_000 + cnt) ' Power up delay
pst.start(115200)
repeat
if (stack [0] ==0 & stack [1] == 0)
x := stack[0] | stack [1]
x := x-1
x := ~x
x := x
pst.dec(x)
'waitcnt(clkfreq + cnt)
pst.newline
repeat count from $1D to $1E
SetPointer(GYRO_OFF,count)
write(GYRO_OFF)
stack[count- $1D] := read(false) ' Gather raw data from compass
'pst.dec(stack[count - $1D])
'pst.str(string(" "))
PUB SetPointer(Device,Register)
start
write(Device)
write(Register)
stop
pub write(value)
value := ((!value) >< 8)
repeat 8
dira[SDA] := value
dira[SCL] := false
dira[SCL] := true
value >>= 1
dira[SDA] := false
dira[SCL] := false
result := !(ina[SDA])
dira[SCL] := true
dira[SDA] := true
pub read(aknowledge)
dira[SDA] := false
repeat 8
result <<= 1
dira[SCL] := false
result |= ina[SDA]
dira[SCL] := true
dira[SDA] := aknowledge
dira[SCL] := false
dira[SCL] := true
dira[SDA] := true
pub start
outa[SDA] := false
outa[SCL] := false
dira[SDA] := true
dira[SCL] := true
pub stop
dira[SCL] := false
dira[SDA] := false
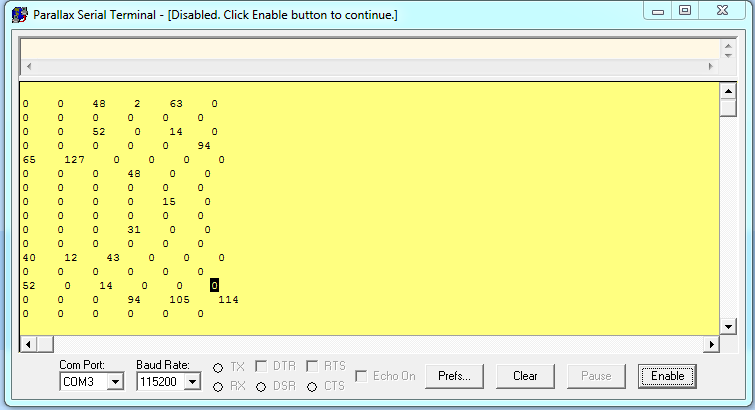
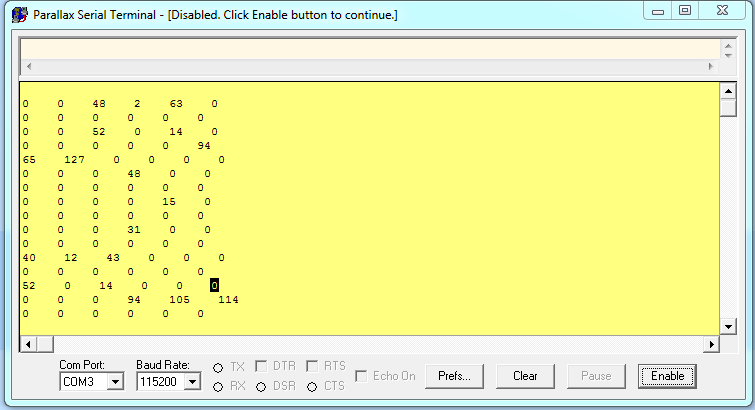
Here you can see what values I get when I print the received bytes from the data registers, and the calculated x-value:::
These are not usable values. They have no relevance to the motion of the sensor.
Any idea what I am doing wrong here all?? If I can get this working for gyroscope, I should be able to get it working for the accelerometer and compass as well. I will post what I work out here.
Also, has anyone been able to find some good I2C tutorials?? I have been dredging my way through, and bits and pieces are coming together. If I can get a better grasp I think it would be worth while to post a tutorial on instructables...
Anyway, let me know what you think!!
Thanks all!!

755 x 415 - 29K
755 x 410 - 25K
Comments
start
write device I2C address w/ write bit
write register address
start
write device I2C address w/ read bit
read byte (with NACK)
stop
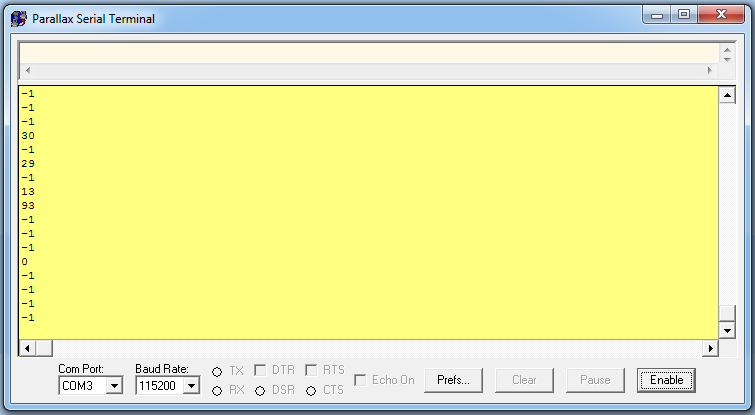
only now I get 255 for every received byte...
I am wondering if I am using the read/write bit correctly. I am using the same device address regardless of read/write operation. I tried adding "1" to the address before performing the final read, but that did not help, same result.
Also, I am confused about how the acknowledge bit works as well. The documentation for the chip says that NACK is defined by leaving SDA HIGH after the 9th cycle (ie, after the read is performed). Is it the duty of the microncontroller to acknowledge that the byte was read correctly? Am I doing this in my code?
Here is the latest:
OBJ pst : "Parallax Serial Terminal" CON _clkmode = xtal1 + pll16x _clkfreq = 80_000_000 SDA = 29 ' SDA of gyro to pin P1 SCL = 28 ' SCL of gyro to pin P0 GYRO_ON = $68 GYRO_OFF = $69 VAR long stack[8],x PUB Main | count waitcnt(clkfreq/100_000 + cnt) ' Power up delay pst.start(115200) repeat if (stack [0] ==0 & stack [1] == 0) x := stack[0] | stack [1] x := x-1 x := ~x x := x 'pst.dec(x) 'waitcnt(clkfreq + cnt) pst.newline repeat count from $1D to $22 SetPointer(GYRO_OFF,count) write(GYRO_OFF -1) 'I also tried subtracting 1 from the first write to this address. No satisfaction stack[count- $1D] := read(false) pst.dec(stack[count - $1D]) pst.str(string(" ")) PUB SetPointer(Device,Register) start write(Device) write(Register) start pub write(value) value := ((!value) >< 8) repeat 8 dira[SDA] := value dira[SCL] := false dira[SCL] := true value >>= 1 dira[SDA] := false dira[SCL] := false result := !(ina[SDA]) dira[SCL] := true dira[SDA] := true pub read(aknowledge) dira[SDA] := false repeat 8 result <<= 1 dira[SCL] := false result |= ina[SDA] dira[SCL] := true dira[SDA] := aknowledge dira[SCL] := false dira[SCL] := true dira[SDA] := true pub start outa[SDA] := false outa[SCL] := false dira[SDA] := true dira[SCL] := true pub stop dira[SCL] := false dira[SDA] := falseAny suggestions??
I am also looking at the Basic_I2C_Driver, I do not understand how the I2C frequency is set in this code. Is it default to 100Khz?
CON ACK = 0 ' I2C Acknowledge NAK = 1 ' I2C No Acknowledge Xmit = 0 ' I2C Direction Transmit Var byte SCL, SDA PUB Initialize(_SCL,_SDA) ' An I2C device may be left in an SCL := _SCL SDA := _SDA ' invalid state and may need to be outa[SCL] := 1 ' reinitialized. Drive SCL high. dira[SCL] := 1 dira[SDA] := 0 ' Set SDA as input repeat 9 outa[SCL] := 0 ' Put out up to 9 clock pulses outa[SCL] := 1 if ina[SDA] ' Repeat if SDA not driven high quit ' by the EEPROM PUB Start outa[SCL]~~ ' Initially drive SCL HIGH dira[SCL]~~ outa[SDA]~~ ' Initially drive SDA HIGH dira[SDA]~~ outa[SDA]~ ' Now drive SDA LOW outa[SCL]~ ' Leave SCL LOW PUB Stop outa[SCL]~~ ' Drive SCL HIGH outa[SDA]~~ ' then SDA HIGH dira[SCL]~ ' Now let them float dira[SDA]~ ' If pullups present, they'll stay HIGH PUB Write(data) : ackbit '' Write i2c data. Data byte is output MSB first, SDA data line is valid '' only while the SCL line is HIGH. Data is always 8 bits (+ ACK/NAK). '' SDA is assumed LOW and SCL and SDA are both left in the LOW state. ackbit := 0 data <<= 24 repeat 8 ' Output data to SDA outa[SDA] := (data <-= 1) & 1 outa[SCL]~~ ' Toggle SCL from LOW to HIGH to LOW outa[SCL]~ dira[SDA]~ ' Set SDA to input for ACK/NAK outa[SCL]~~ ackbit := ina[SDA] ' Sample SDA when SCL is HIGH outa[SCL]~ outa[SDA]~ ' Leave SDA driven LOW dira[SDA]~~ PUB Read(ackbit): data '' Read in i2c data, Data byte is output MSB first, SDA data line is '' valid only while the SCL line is HIGH. SCL and SDA left in LOW state. data := 0 dira[SDA]~ ' Make SDA an input repeat 8 ' Receive data from SDA outa[SCL]~~ ' Sample SDA when SCL is HIGH data := (data << 1) | ina[SDA] outa[SCL]~ outa[SDA] := ackbit ' Output ACK/NAK to SDA dira[SDA]~~ outa[SCL]~~ ' Toggle SCL from LOW to HIGH to LOW outa[SCL]~ outa[SDA]~ ' Leave SDA driven LOW PUB WriteWait(devSel, addrReg) : ackbit '' Wait for a previous write to complete. Device select code is devSel. Device '' starting address is addrReg. The device will not respond if it is busy. '' The device select code is modified using the upper 3 bits of the 18 bit addrReg. '' This returns zero if no error occurred or one if the device didn't respond. devSel |= addrReg >> 15 & 10 Start ackbit := Write( devSel | Xmit) Stop return ackbitLet me know what you think!
You are also missing the stop condition.
The ACK bit comes from however read the last byte. If you're sending data to a slave, then the ACK comes from the slave. If it's sending data to the Propeller (master), then the ack bit comes from the master.
In the second code post that you have, the speed is implied by the execution time of the code. There is no explicit clock speed setting. This works, since I2C is a synchronous protocol, so the precise clock speed doesn't matter as long as it's below a maximum.
I'd recommend that you use an already created driver to interface to the sensors.