

H48C 3axis Accelerometer calibration issues
 squarebot
Posts: 1
squarebot
Posts: 1
Howdy,
I am using an h48c 3 axis accelerometer on my mobile robot, and sending the values through xbee to labview, then integrating them to calculate position. I finally got it working, but here is the issue. When the robot is at a standstill, the accelerations measured are between, roughly, .04 and .05 g's, even after taking the first 100 values, averaging them, and substracting them in an attempt to calibrate. This means it thinks it's velocity is around 125ft per second, when the robot hasn't moved.
Has anyone encountered this problem? What have you done? I am not asking for the world, just a reasonable value. I will be using wheel encoders and baysian sensor fusion to refine the position estimate, but this is WAY off. Is this is a signal processing issue (hardware, software?) ?
I am using an h48c 3 axis accelerometer on my mobile robot, and sending the values through xbee to labview, then integrating them to calculate position. I finally got it working, but here is the issue. When the robot is at a standstill, the accelerations measured are between, roughly, .04 and .05 g's, even after taking the first 100 values, averaging them, and substracting them in an attempt to calibrate. This means it thinks it's velocity is around 125ft per second, when the robot hasn't moved.
Has anyone encountered this problem? What have you done? I am not asking for the world, just a reasonable value. I will be using wheel encoders and baysian sensor fusion to refine the position estimate, but this is WAY off. Is this is a signal processing issue (hardware, software?) ?
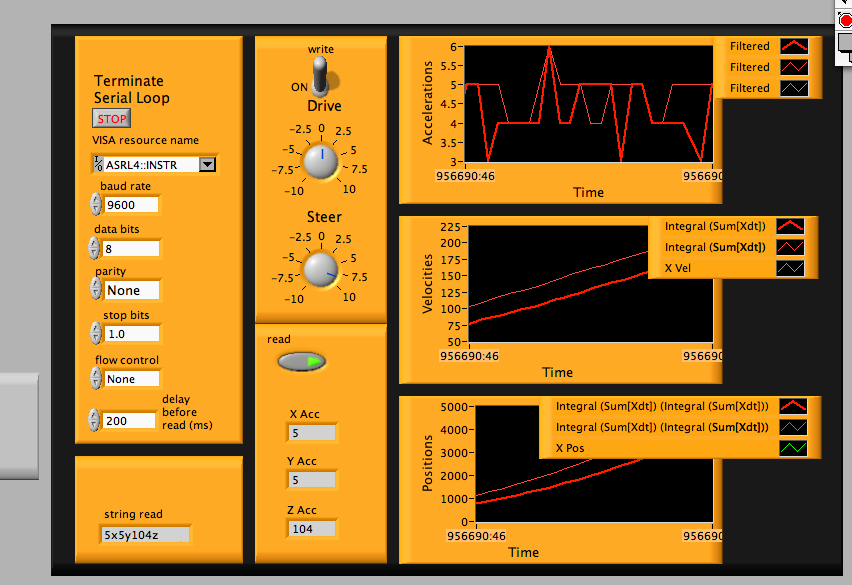
852 x 585 - 79K
spin
11K
Comments
My guess is the sensor isn't mounted completely level with the ground. Either the mount within the robot isn't level or the floor of the room isn't level. I'd think this would be expected. sorry, I see you already subtracted these values.
I thought a general practice was to calibrate the accelerometer when the acclerometer is at rest in order to adjust for the acceleration do to gravity?
How is the sensor mounted? Are there any vibrations that could be affecting the sensor?