

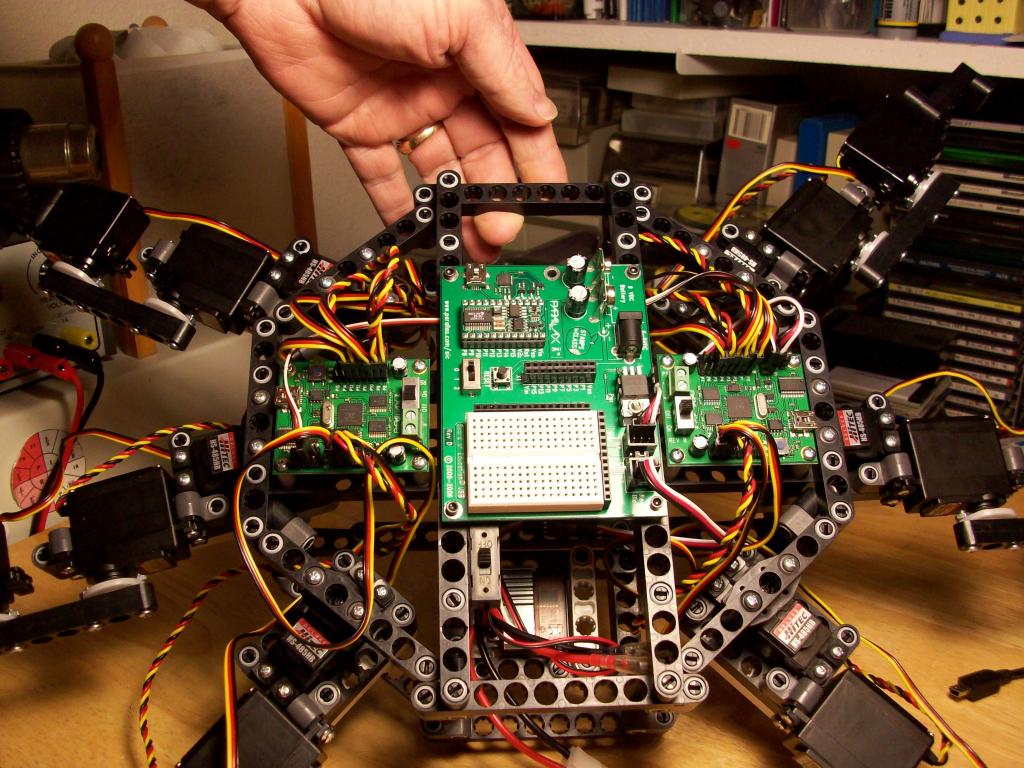
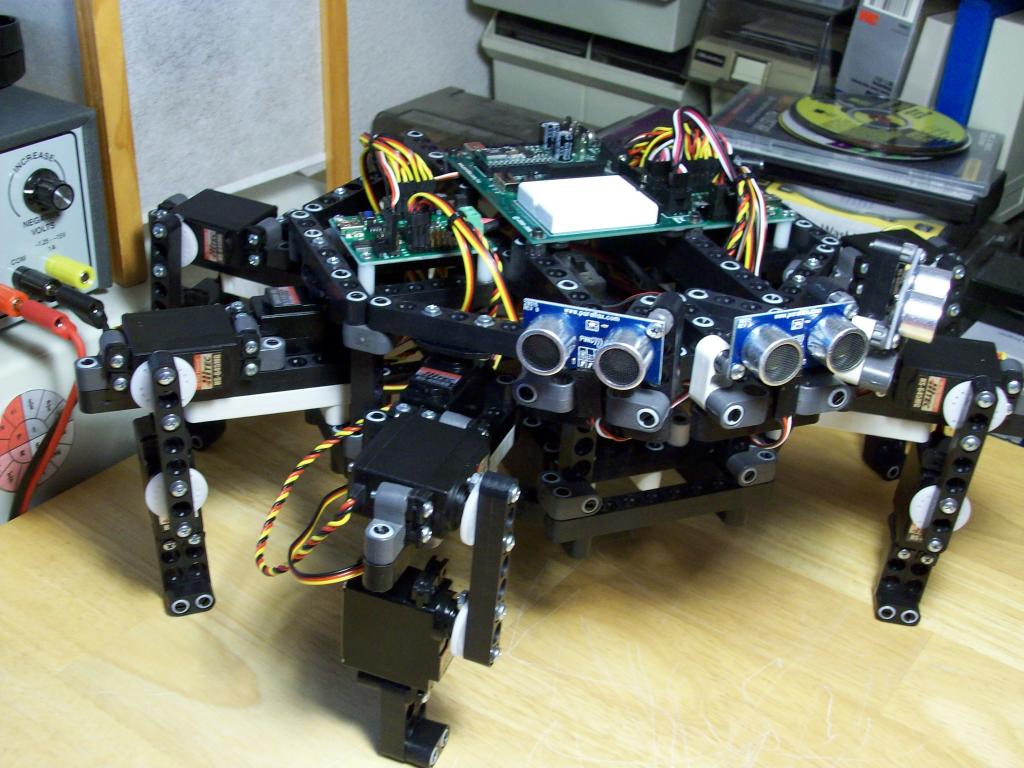
6 legged 3DOF Spiderbot
 Carol Hazlett
Posts: 312
Carol Hazlett
Posts: 312
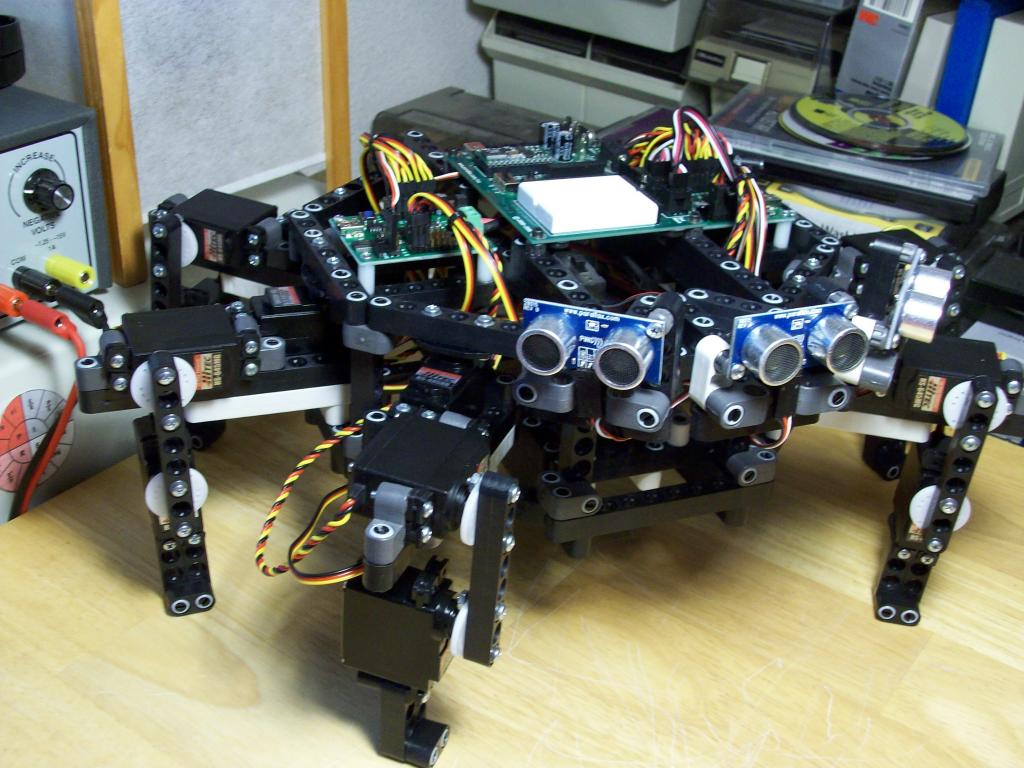
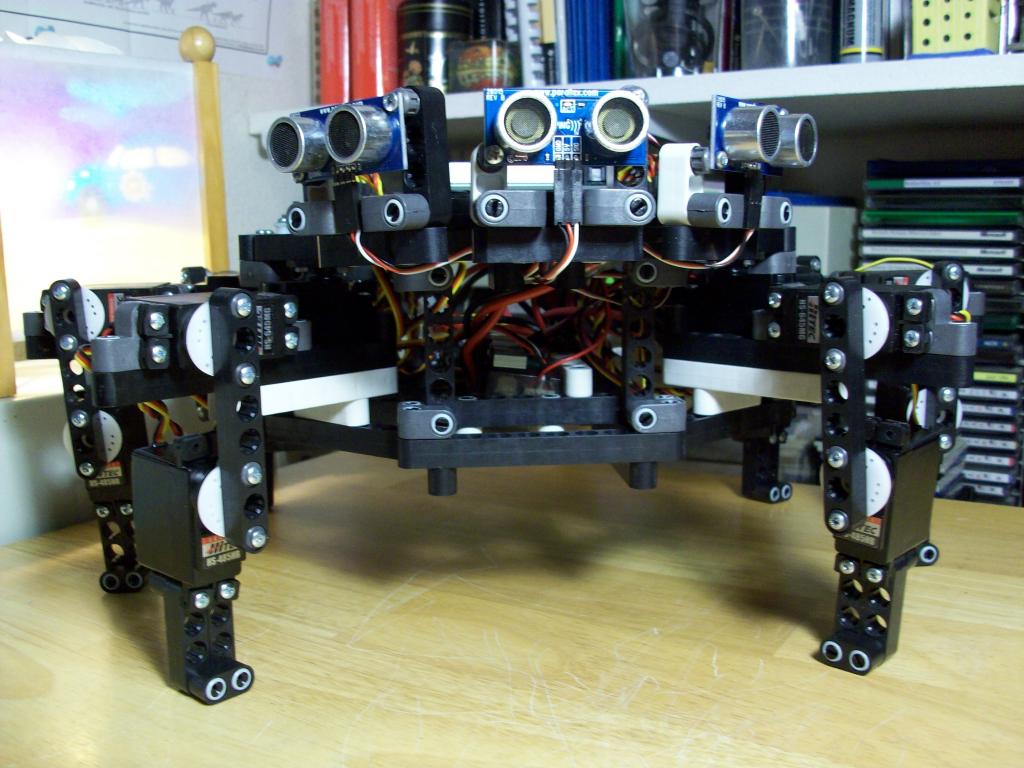
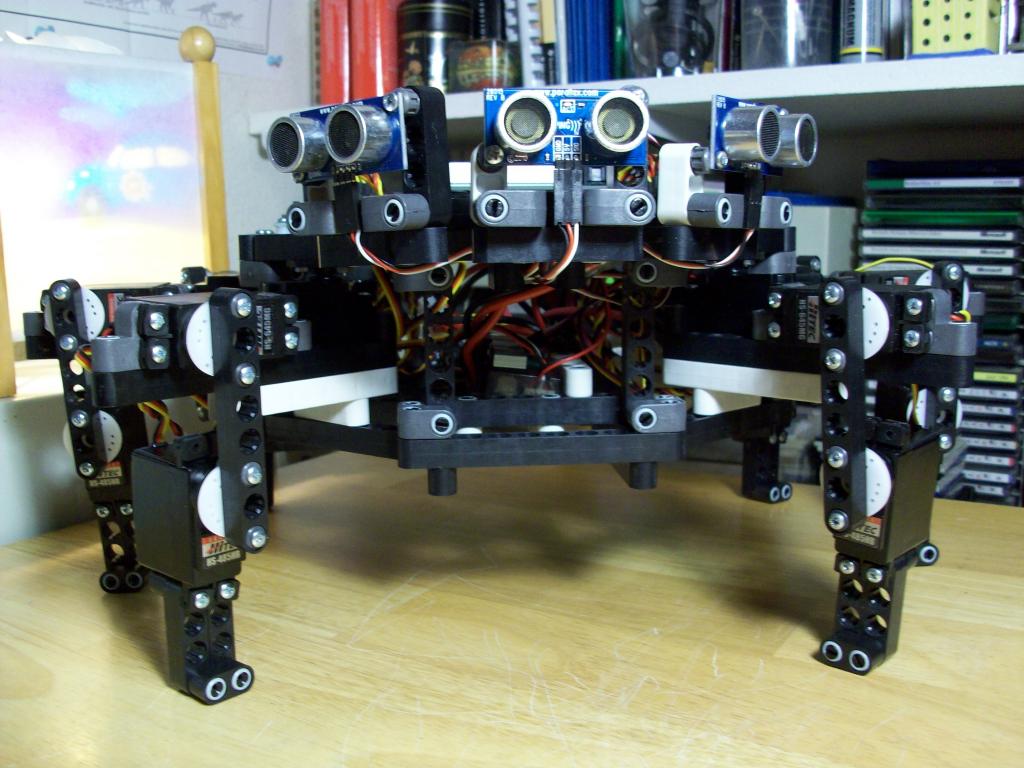
This has been an overwhelming project for me. I've learned a lot by even attempting it and still have a ways to go! The body is built using the Minds-i building system (mymindsicom) with a BOE for brains and two Prop Servo Controllers for the legs and Pings. I have it doing some simple movements but haven't been able to program a decent looking gait yet. It is really a prototype yet as I am thinking of switching to a Propeller board for the brains. There is an incompatibility in voltage between the Prop Servo Controllers and the Propeller BOE I have to address first. That and I am still new to Spin. Here is some code I have written for the spider, and all suggestions and advice will be gladly welcomed.
I haven't annotated this code yet. This was a little demo of the spider twisting his shoulders and moving his body up and down. You can see videos of this project as it progressed at facebook.com/Robothon or facebook.com/CarolLynnHazlett.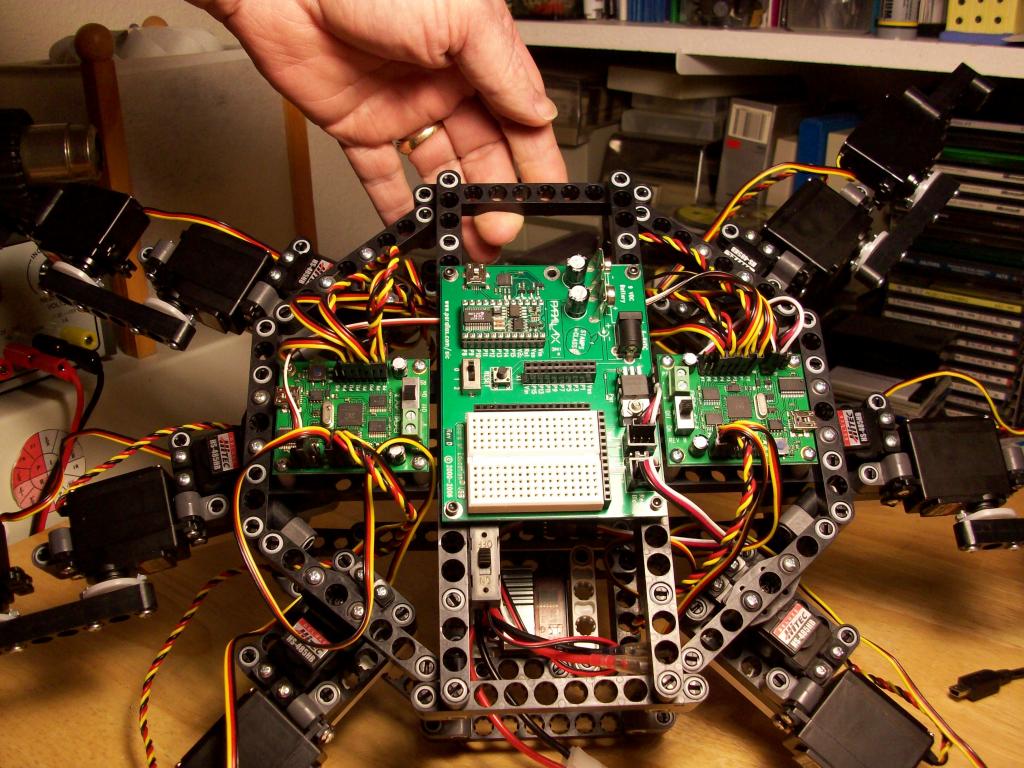
' {$STAMP BS2}
' {$PBASIC 2.5}
ch VAR Byte
pw VAR Word
ra VAR Byte
twist VAR Byte
Sdat1 CON 14
Sdat2 CON 15
Baud CON 396
FRHip CON 10
FRKnee CON 11
FRFoot CON 5
MRHip CON 8
MRKnee CON 9
MRFoot CON 4
RRHip CON 6
RRKnee CON 7
RRFoot CON 3
FLHip CON 4
FLKnee CON 5
FLFoot CON 2
MLHip CON 2
MLKnee CON 3
MLFoot CON 1
RLHip CON 0
RLKnee CON 1
RLFoot CON 0
Main:
twist = 1
GOSUB Stance
GOSUB High_Stance
FOR twist = 1 TO 3
GOSUB Twist_Left
GOSUB Twist_Right
NEXT
GOSUB Stance
FOR twist = 1 TO 3
GOSUB Twist_Left
GOSUB Twist_Right
next
GOSUB Stance
END
Stance:
'--------------Front left leg--------------------------------------------
ra = 11
pw = 780
SEROUT Sdat1, Baud+$8000,["!SC", FLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1000
SEROUT Sdat1, Baud+$8000,["!SC", FLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 550
SEROUT Sdat2, Baud+$8000,["!SC", FLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'--------------Middle left leg-------------------------------------------
ra = 11
pw = 720
SEROUT Sdat1, Baud+$8000,["!SC", MLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1000
SEROUT Sdat1, Baud+$8000,["!SC", MLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 550
SEROUT Sdat2, Baud+$8000,["!SC", MLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'--------------Rear left leg---------------------------------------------
ra = 11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", RLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1000
SEROUT Sdat1, Baud+$8000,["!SC", RLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 600
SEROUT Sdat2, Baud+$8000,["!SC", RLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'---------------Front right leg------------------------------------------
ra = 11
pw = 720
SEROUT Sdat1, Baud+$8000,["!SC", FRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 500
SEROUT Sdat1, Baud+$8000,["!SC", FRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 850
SEROUT Sdat2, Baud+$8000,["!SC", FRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'----------------Middle right leg---------------------------------------
ra =11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", MRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 500
SEROUT Sdat1, Baud+$8000,["!SC", MRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 930
SEROUT Sdat2, Baud+$8000,["!SC", MRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'----------------Rear right leg------------------------------------------
ra = 11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 500
SEROUT Sdat1, Baud+$8000,["!SC", RRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 930
SEROUT Sdat2, Baud+$8000,["!SC", RRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
RETURN
Twist_Right:
ra = 10
pw = 900
SEROUT Sdat1, Baud+$8000,["!SC", FLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 850
SEROUT Sdat1, Baud+$8000,["!SC", MLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 850
SEROUT Sdat1, Baud+$8000,["!SC", RLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat1, Baud+$8000,["!SC", FRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 850
SEROUT Sdat1, Baud+$8000,["!SC", MRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 850
SEROUT Sdat1, Baud+$8000,["!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
RETURN
Twist_Left:
ra = 10
pw = 650
SEROUT Sdat1, Baud+$8000,["!SC", FLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 600
SEROUT Sdat1, Baud+$8000,["!SC", MLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 600
SEROUT Sdat1, Baud+$8000,["!SC", RLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 550
SEROUT Sdat1, Baud+$8000,["!SC", FRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 600
SEROUT Sdat1, Baud+$8000,["!SC", MRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 600
SEROUT Sdat1, Baud+$8000,["!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
RETURN
Lower_Body:
'--------------Front left leg--------------------------------------------
ra = 11
pw = 780
SEROUT Sdat1, Baud+$8000,["!SC", FLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 700
SEROUT Sdat1, Baud+$8000,["!SC", FLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 300
SEROUT Sdat2, Baud+$8000,["!SC", FLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'--------------Middle left leg-------------------------------------------
ra = 11
pw = 720
SEROUT Sdat1, Baud+$8000,["!SC", MLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 700
SEROUT Sdat1, Baud+$8000,["!SC", MLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 300
SEROUT Sdat2, Baud+$8000,["!SC", MLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'--------------Rear left leg---------------------------------------------
ra = 11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", RLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 700
SEROUT Sdat1, Baud+$8000,["!SC", RLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 300
SEROUT Sdat2, Baud+$8000,["!SC", RLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'---------------Front right leg------------------------------------------
ra = 11
pw = 700
SEROUT Sdat1, Baud+$8000,["!SC", FRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat1, Baud+$8000,["!SC", FRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1200
SEROUT Sdat2, Baud+$8000,["!SC", FRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'----------------Middle right leg---------------------------------------
ra =11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", MRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat1, Baud+$8000,["!SC", MRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1200
SEROUT Sdat2, Baud+$8000,["!SC", MRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'----------------Rear right leg------------------------------------------
ra = 11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 800
SEROUT Sdat1, Baud+$8000,["!SC", RRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1200
SEROUT Sdat2, Baud+$8000,["!SC", RRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
RETURN
High_Stance:
'--------------Front left leg--------------------------------------------
ra = 11
pw = 780
SEROUT Sdat1, Baud+$8000,["!SC", FLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1200
SEROUT Sdat1, Baud+$8000,["!SC", FLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 750
SEROUT Sdat2, Baud+$8000,["!SC", FLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'--------------Middle left leg-------------------------------------------
ra = 11
pw = 720
SEROUT Sdat1, Baud+$8000,["!SC", MLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1200
SEROUT Sdat1, Baud+$8000,["!SC", MLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 750
SEROUT Sdat2, Baud+$8000,["!SC", MLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'--------------Rear left leg---------------------------------------------
ra = 11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", RLHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 1170
SEROUT Sdat1, Baud+$8000,["!SC", RLKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 750
SEROUT Sdat2, Baud+$8000,["!SC", RLFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'---------------Front right leg------------------------------------------
ra = 11
pw = 720
SEROUT Sdat1, Baud+$8000,["!SC", FRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 300
SEROUT Sdat1, Baud+$8000,["!SC", FRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 650
SEROUT Sdat2, Baud+$8000,["!SC", FRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'----------------Middle right leg---------------------------------------
ra =11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", MRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 300
SEROUT Sdat1, Baud+$8000,["!SC", MRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 750
SEROUT Sdat2, Baud+$8000,["!SC", MRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
'----------------Rear right leg------------------------------------------
ra = 11
pw = 750
SEROUT Sdat1, Baud+$8000,["!SC", RRHip, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 320
SEROUT Sdat1, Baud+$8000,["!SC", RRKnee, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
pw = 730
SEROUT Sdat2, Baud+$8000,["!SC", RRFoot, ra, pw.LOWBYTE, pw.HIGHBYTE, CR]
PAUSE 500
RETURN
I haven't annotated this code yet. This was a little demo of the spider twisting his shoulders and moving his body up and down. You can see videos of this project as it progressed at facebook.com/Robothon or facebook.com/CarolLynnHazlett.
Comments
Will she she know when her feet are on the ground? For example, "stance" on an uneven surface?
Have you worked out the algorithm for controlling the gait yet?
I'm working on my second hexapod right now. The programming is kind of mind boggling. While I'm trying to come up with code on my own for the fun of it, there is code available to control a hexapod with a Propeller.
Even with your servo control boards, I think a hexapod is a bit much for a BS2 to try to control.
What incompatibility is this? Most 5V devices see the 3.3V output from a Propeller as logic high and the Propeller can receive 5V logic if a series resistor of 4.7K or more is used. I know the Scribbler 2's level shifters interfere with its ability to interface with a Ping, but I don't know if the PSC would have a problem communicating with a Ping or not.
I'd think you could probably use one of your PSC boards as the main brain for your bot so you wouldn't even need to purchase another Propeller board to upgrade the brains of your hexapod. If you do want to use a third Propeller board there are several options. The PropBOE has lots of cool features that would likely come in handy with your robot. The main downside to the PropBOE is that many of the IO pins are used by the devices on the board so only 20 of the 32 IO pins are available to use to directly control servos. This wouldn't be a problem in your case since you have the PSC boards.
I'm using a Propeller Proto board on my current hexapod, but I used a QuickStart board to control my popsicle stick hexapod.
Whichever Propeller board you use, I doubt it would have a problem interfacing with your PSC boards.
IIRC, you were planning on using the software that comes with the PSCs to program the positions of each servo as it walks. I'd think trying to assign a position to each servo as the robot walks would be exceedingly tedious. I think an equation that expresses the way you want the servos to move would be a lot easier (though far from easy).
Ideally, you don't want the feet of the hexapod to slide on the ground as it walks. It should move its legs together in unison while keeping the feet from sliding on the ground. This generally requires inverse kinematics.
Have you seen what Paul K's hexapods can do? I think they're amazing. Paul has posted his code for controlling hexapods so you wouldn't need to come up the the equations yourself.
I just watched a few of your hexapod videos. I think the center positions of your servos are different than the way Paul and myself have ours centered. I think Paul's code would still work with your robot, but it might need to be modified a little.
Your robot looks cool just standing there; I think it's going to be a lot of fun to see it walk.