

Robot Steeringy

New 'bot will feature a legitimate steering system with a wheel (in the midst of fabricating a polycarbonate, Formula 1 style wheel). My question is, which steering system is easier to fabricate:
A pitman arm kind of thing

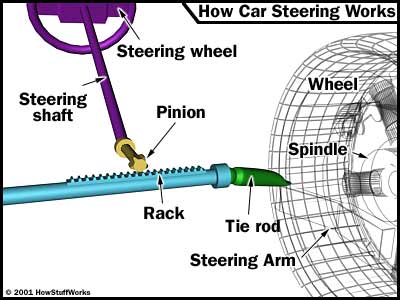
Or a full Rack & Pinion (without the hydraulic power steering aid - robots only 110 pounds :P )
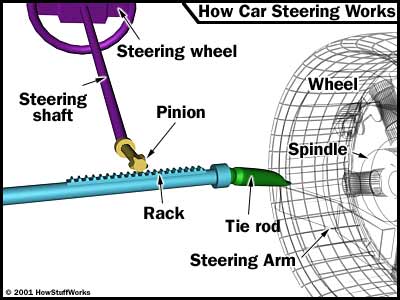
The steering shaft needs to be 3/4", round tube metal (for quick-release hub, wires, etc). And i have no way of easily getting it welded :P keep that in mind
A pitman arm kind of thing
Or a full Rack & Pinion (without the hydraulic power steering aid - robots only 110 pounds :P )
The steering shaft needs to be 3/4", round tube metal (for quick-release hub, wires, etc). And i have no way of easily getting it welded :P keep that in mind

700 x 525 - 36K
400 x 300 - 24K
Comments
I am not sure if a 90 degree bracket is ideal but it is a good place to start. The size of the bracket needs to be determined, and will depend on the wheel steering arm size.
That would depend on several things such as the wheel base of the robot, the orientation of the steering mechanism, the minimum turning radius you want, the wheel assemblies you are going to use, etc. Even knowing all that, there would still be some experimentation required on your part. You should post a diagram of the robot chassis with dimensions along with any parts you intend to use in it's construction.
A dxf is ok, but almost everyone has a pdf reader so I would suggest that format.
For figuring out the optimal steering geometry I would suggest using a plywood disk instead of the angle bracket and wood for the steering arms. Once you have determined the dimensions required you can make the metal parts. Another option to consider is the use of a bicycle sprocket instead of an angle bracket.