

PropTank the Propeller powered tank.

A year ago I purchased a USB proto board on sale. Ifter working on it off and on for a year I finally have something to show.
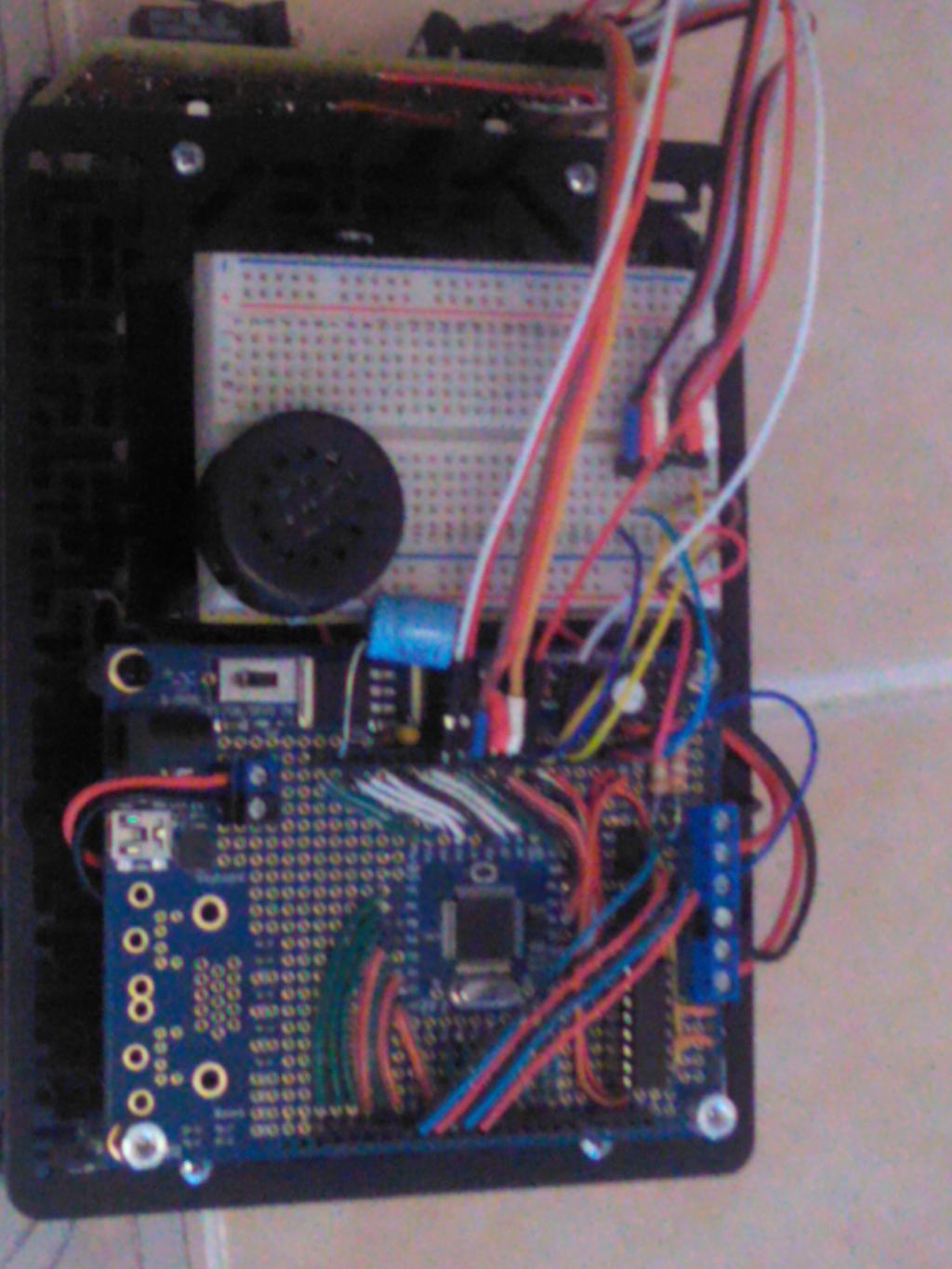
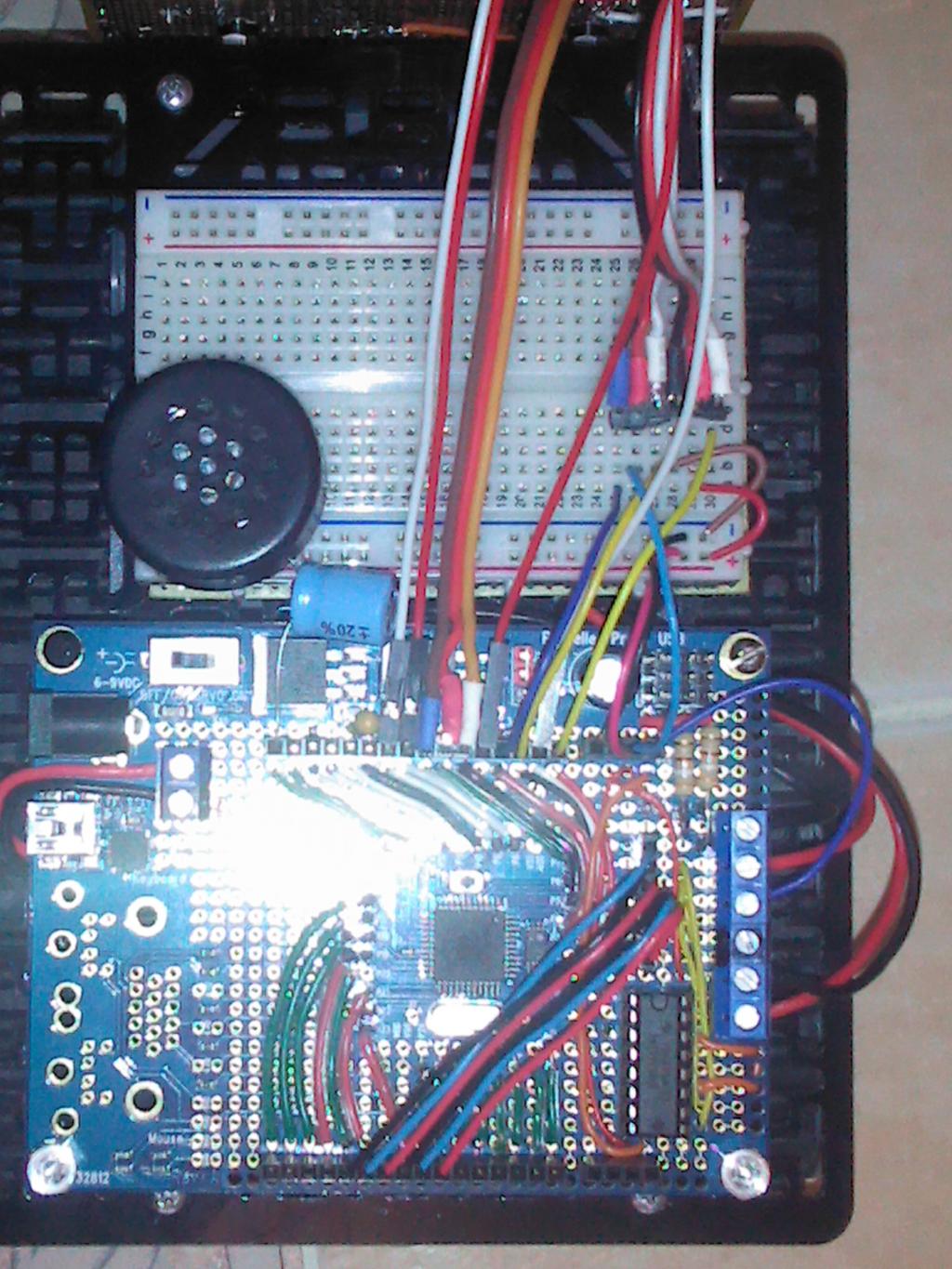
My first step was a to solder headers to match the Propeller platform, some 3.9 kOhm resistors to create 5 volt tolerant servo headers, an SN754410NE, and some screw terminals. This created a fairly capable robot control board for about $25. Here's what it looks like:
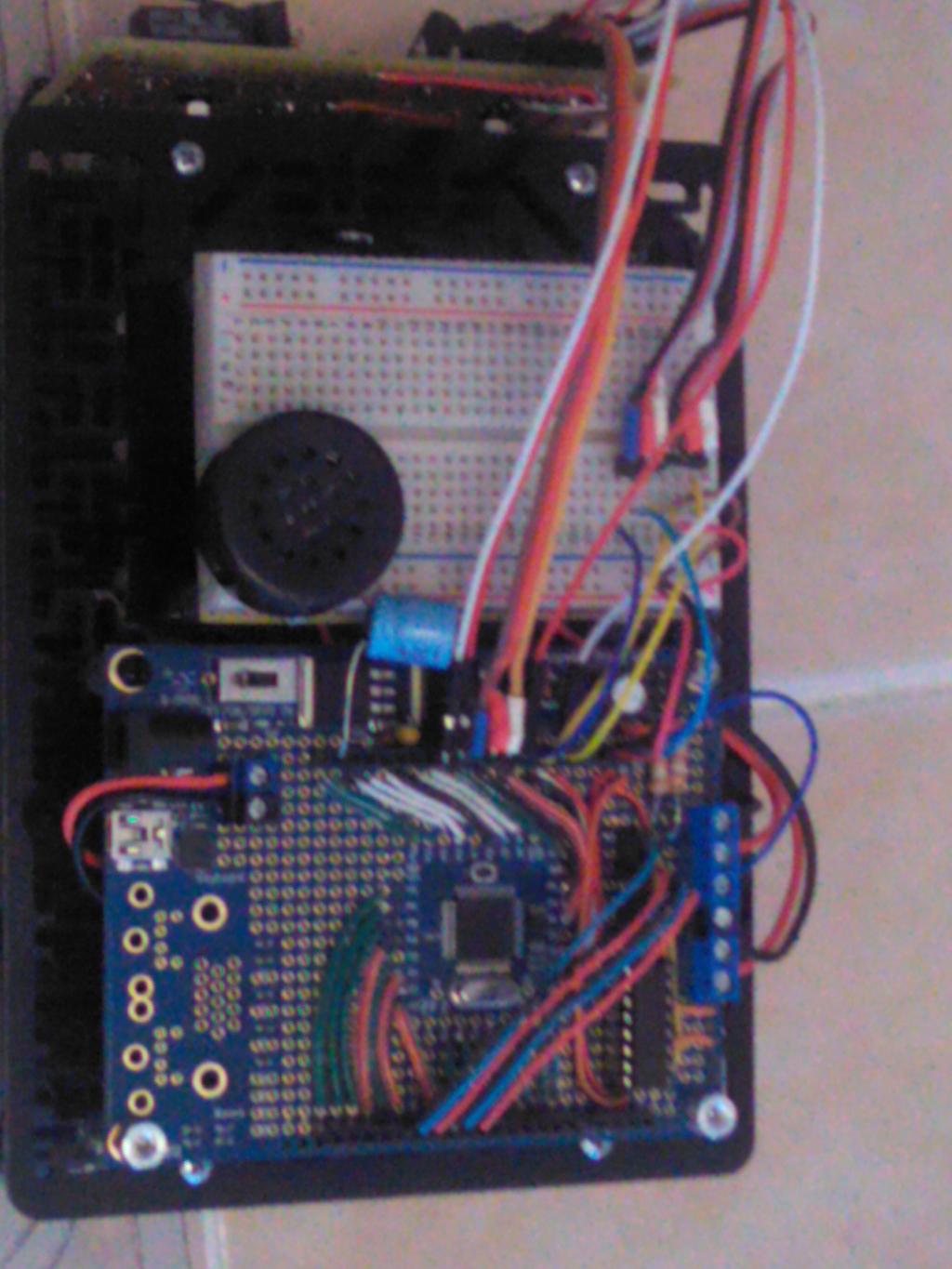
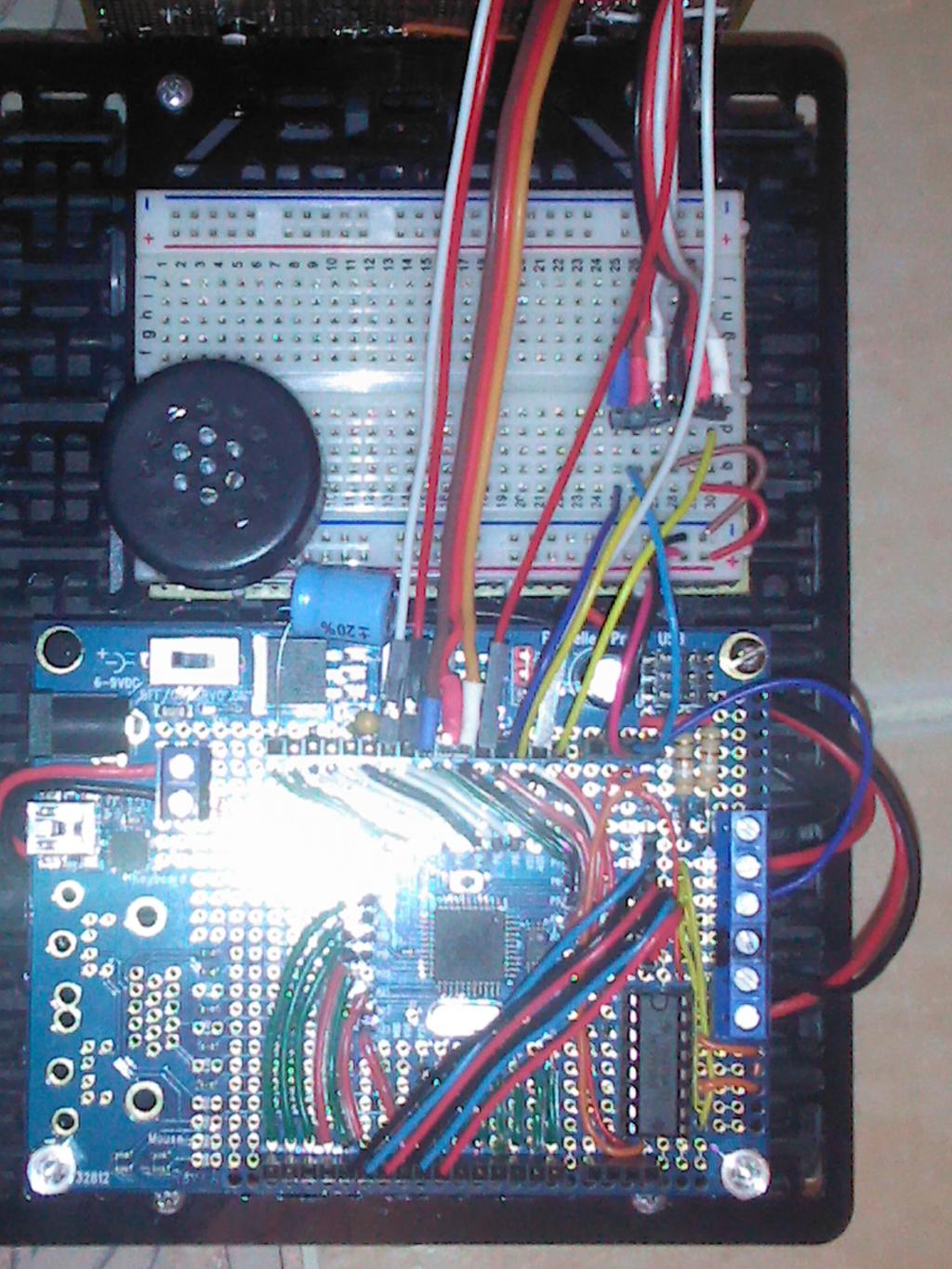
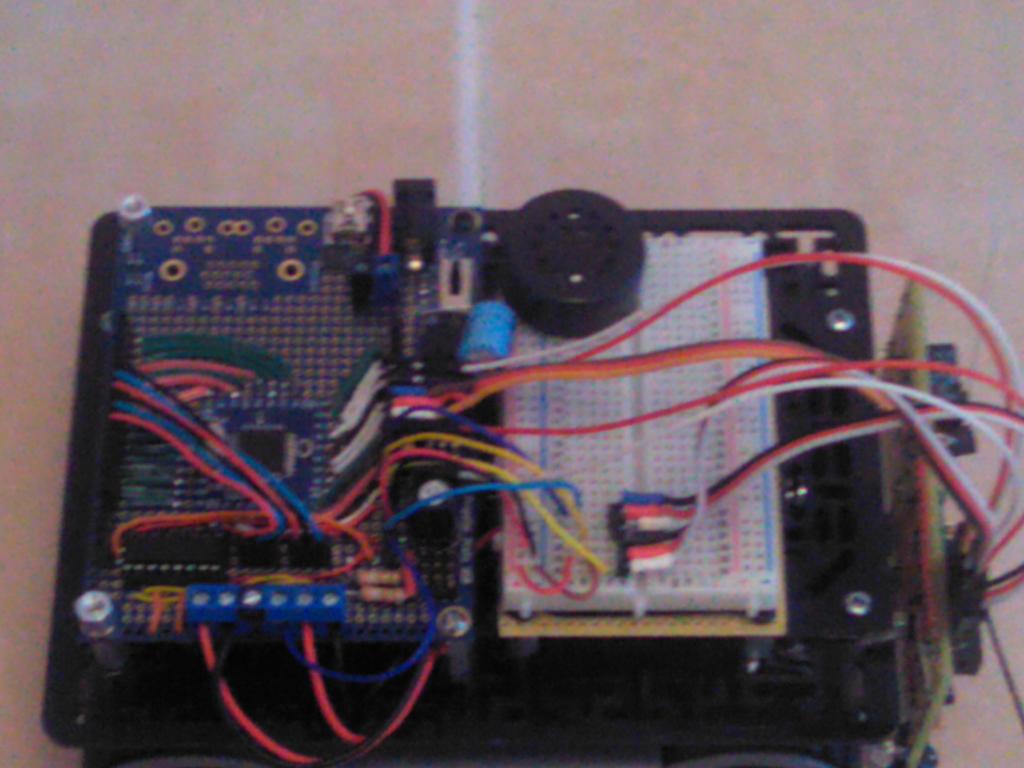
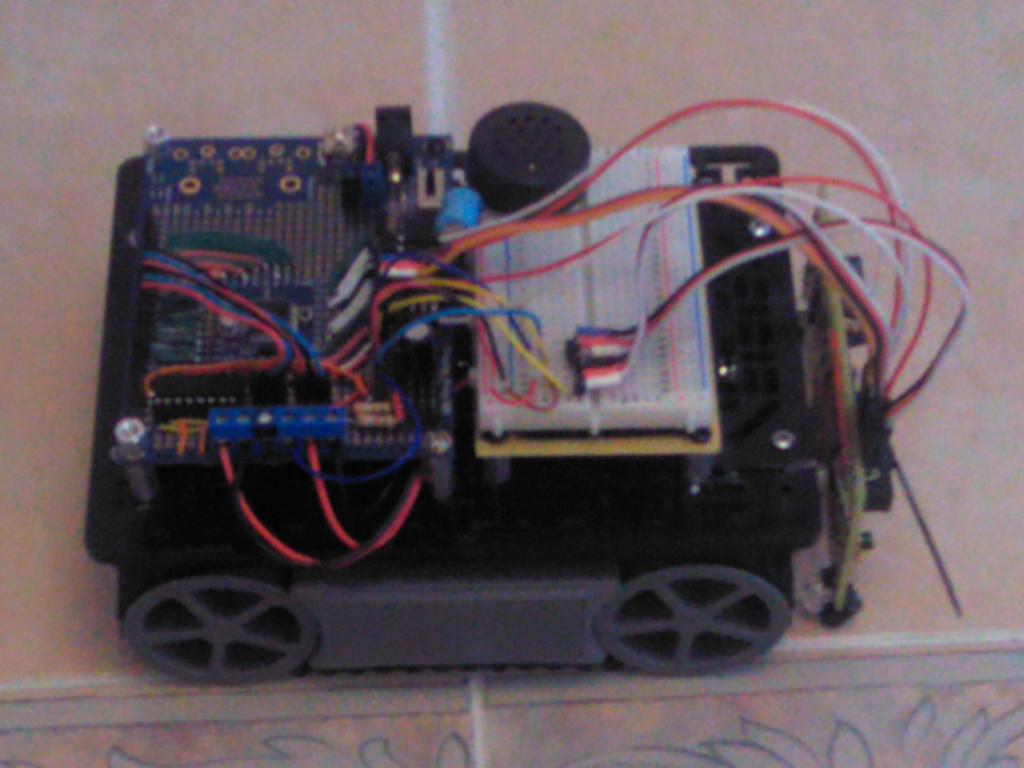
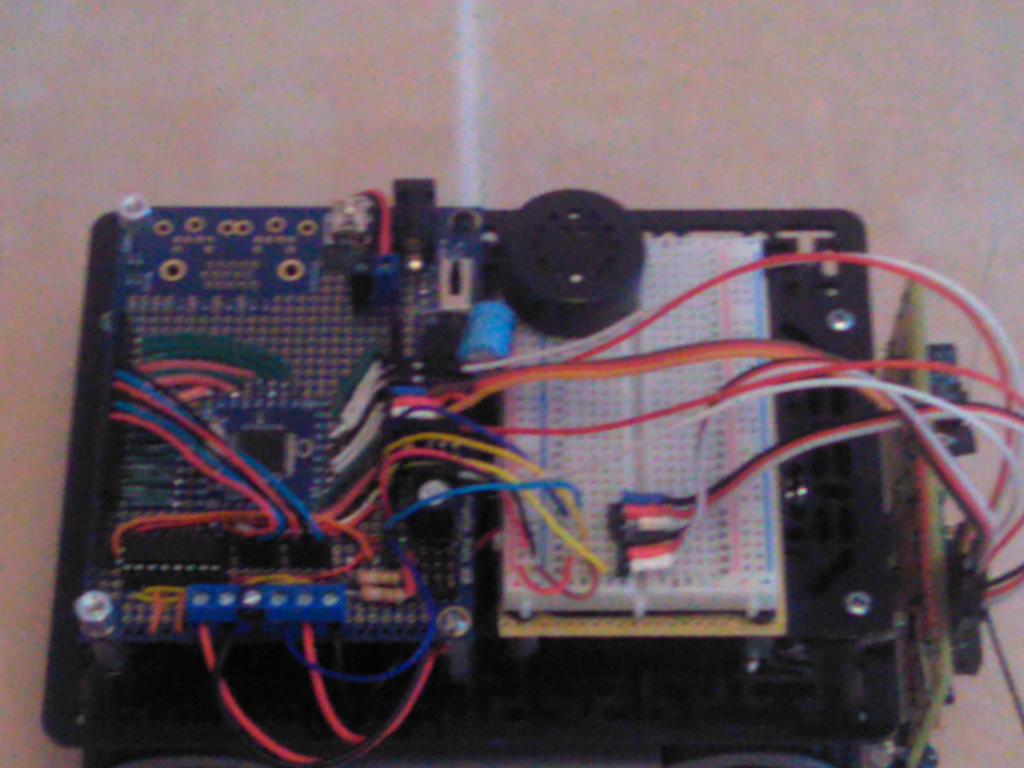
Most of my favorite robots use servos for locomotion, so I want this robot to use DC motors to branch out. An eBay purchase later gave me a vehicle where I mounted the board and a breadboard as you see above more below.
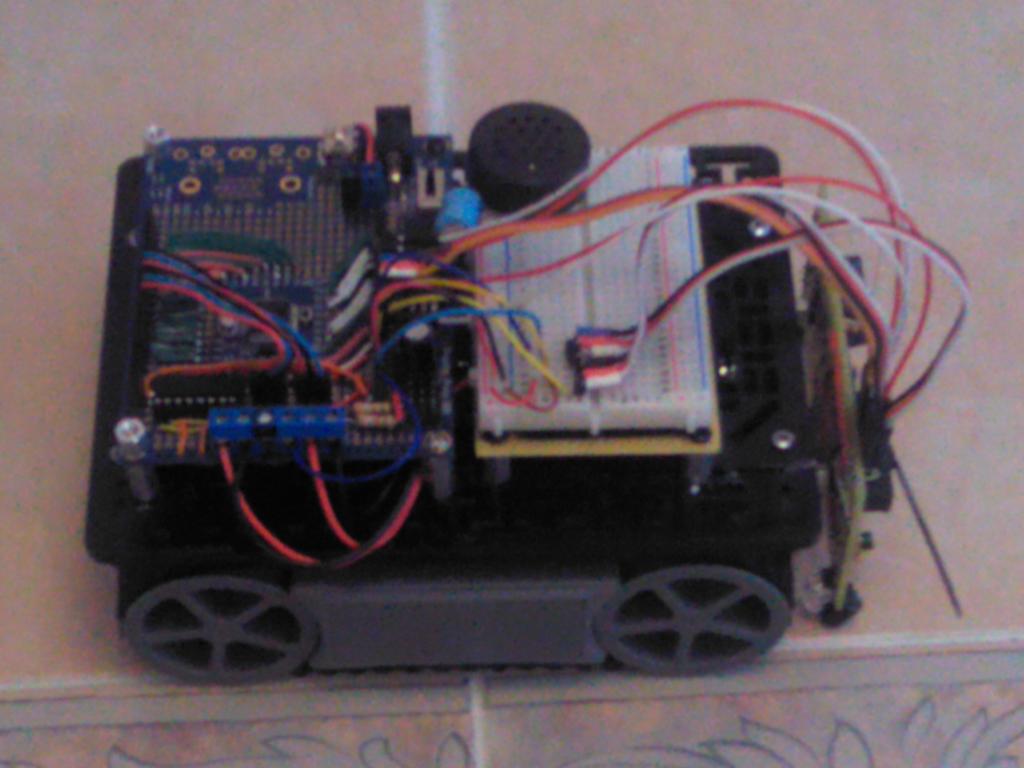
I added a sensor plate to the front and I'm working on some programs now.
My first step was a to solder headers to match the Propeller platform, some 3.9 kOhm resistors to create 5 volt tolerant servo headers, an SN754410NE, and some screw terminals. This created a fairly capable robot control board for about $25. Here's what it looks like:
Most of my favorite robots use servos for locomotion, so I want this robot to use DC motors to branch out. An eBay purchase later gave me a vehicle where I mounted the board and a breadboard as you see above more below.
I added a sensor plate to the front and I'm working on some programs now.
1024 x 1365 - 129K
1024 x 768 - 67K
1024 x 1365 - 207K
1024 x 768 - 74K
Comments
Here's a video of the tank rolling around a table while avoiding edges and trying to push stuff off the table:
Here's a video showing how it sees a can and steers towards it.
Here's a source code archive:
PropTankNavigate - Archive [Date 2012.12.27 Time 22.58].zip
BTW I say a pox on acrylic again. The edge sensors had a few glitches and more than once the tank went over the edge. Three out of four times I caught it, but the fourth time it hit the ground and sustained damage to the acrylic top. I also smashed a cheap Chinese ultrasound sensor. After this video I'm laying off tables for a while.
So what kind of logic have you come up with to not get stuck in the corners?
With "LightShowBot" "ChairLegDetection" system, depending on what part of the spring switch was bumped, would
change direction randomly, and at the same time would only allow three turns in the same direction.
On the other hand, I was not dealing with a cliff as an edge of the world situation... I guess I could add rear cliff sensing.
Anyways, cool Tank Bot, thanks for sharing.
-Tommy
Tommy, right now I have a fixed action pattern which is why it can get stuck. I think you're right that a few coin tosses thrown into the code would solve this problem.
Erco, a video like that would be a riot and might go viral. But my wife would not be happy about dishes and food all over the floor.