

Tires in front tread is back? 4wd..
 rwgast_logicdesign
Posts: 1,464
rwgast_logicdesign
Posts: 1,464
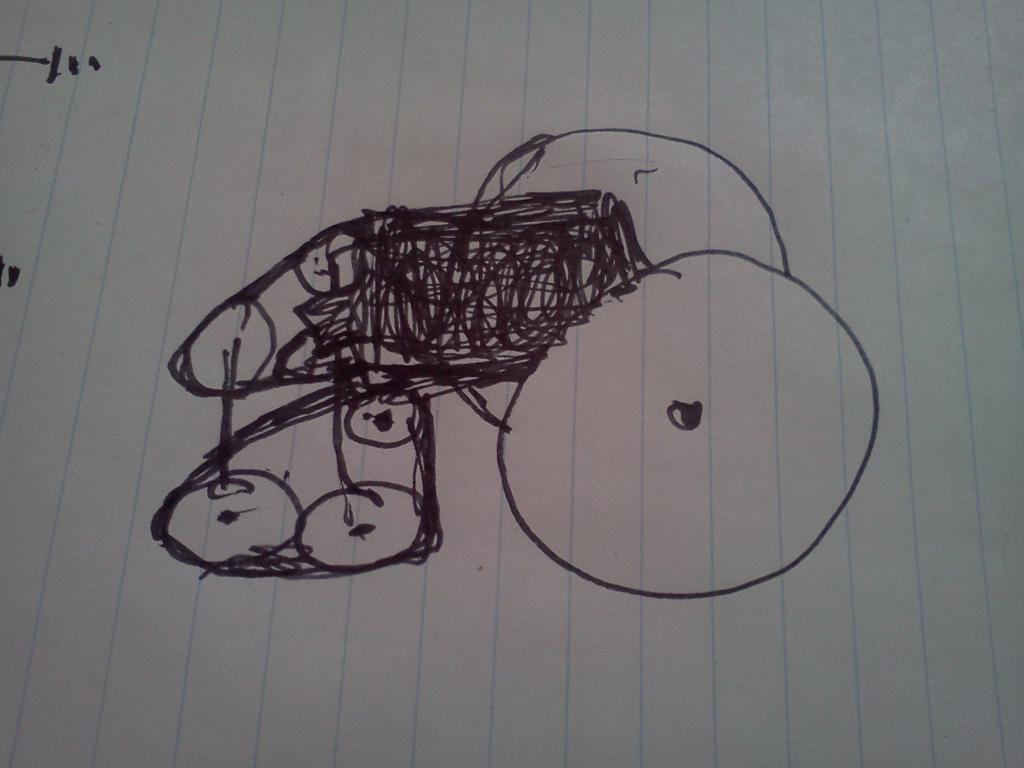
So I got to thinking about ways to replace my caster wheel and I have all the parts around to add some tracks in a triangle for back wheels.. heres a very bad drawing showing my idea
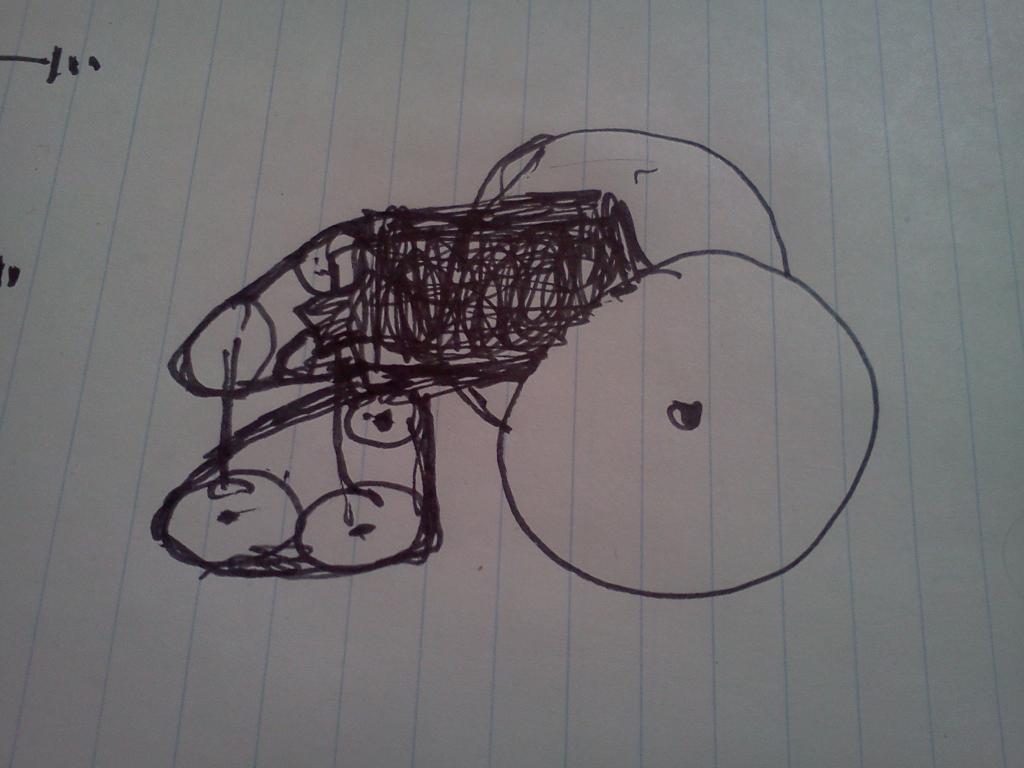
Now my idea is to use fast 12v ungeared motors in the pullys at the top of the tread, the two front wheels are obviously those micromo 141:1 motors. Im thinking those tracks in the back will help add traction and if I use the motors I plan to I can get the bot pretty speedy. What im unsure about is if I have the front gear motors running which are obviously alot slower what is going to happen?? Even if I matched the gear motors on the back tracks the wheel sizeing and speed is going to be totally different. I had also thought about only running one set of motors at time front or back, but that obvioulsy wont work when turning, not only that but letting the gear motors free run is going to add a ton of resistance to the ungeared motors reducing the speed..
Now my idea is to use fast 12v ungeared motors in the pullys at the top of the tread, the two front wheels are obviously those micromo 141:1 motors. Im thinking those tracks in the back will help add traction and if I use the motors I plan to I can get the bot pretty speedy. What im unsure about is if I have the front gear motors running which are obviously alot slower what is going to happen?? Even if I matched the gear motors on the back tracks the wheel sizeing and speed is going to be totally different. I had also thought about only running one set of motors at time front or back, but that obvioulsy wont work when turning, not only that but letting the gear motors free run is going to add a ton of resistance to the ungeared motors reducing the speed..
1024 x 768 - 59K
Comments
If you want to use four motors on your robot you'll need some way of matching the speeds of all the wheels/treads.
The circumfence of the wheels and pulleys are proportional to the diameter so you need the back pulley to turn at 5.25 times the rpm of the front wheels.
This is very possible if you're monitoring the speed of each motor.
For example my mecanum wheeled robot monitors the speed of each of the four motors and adjusts the PWM duty to bring the speed up or down to the target speed for each particular wheel.
Unless your rear motor can run at 5.25 times the speed of the front motor then you'll have to slow the front motors down in order to allow the back motors to keep up.
If you're going to make them fixed, and your front motors are sufficiently powerful enough, you could run a pulley back to the tracks with a 5.25:1 reduction.