

Servo, Stepper, Or closed Loop?
 rwgast_logicdesign
Posts: 1,464
rwgast_logicdesign
Posts: 1,464
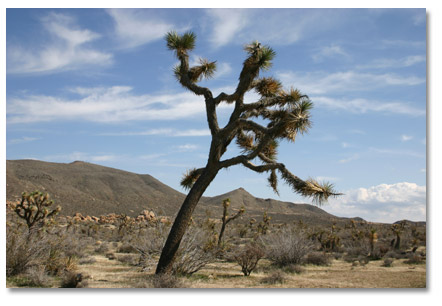
So if I were to do an outdoors bot in this kind of terrain
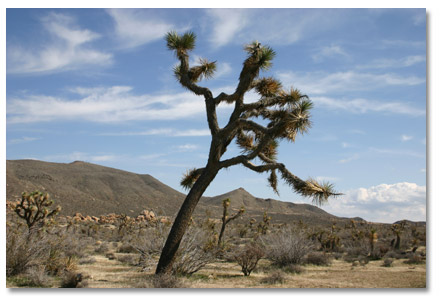
What would be my best option for motors? A closed loop system is cool becuase you can use things like crazy drill motors etc if you need more power, although looking at what smaller motors can do I think big honkin 10 amp motors my be over kill! Ive also noticed there are geared servos out there, but Im not sure how fast these would go, and as far as steppers im completely clueless of there price to power range, looking at robot shop the biggest stepper is like 4vs, also to get a smooth drive you would have to implement micro stepping right? Basically im just trying to figure out the most cost effective option for a motor system where the posistion is controlled or and detectable. Gearing servos seems like the easiest choice but like I said im not sure of its power and speed. Im looking at the bot being somewhere in the 10lb range give or take 5lbs. My idea is just to use 4 ryobi drill motors with there gear box and batterys but like I said that may be over kill as the motors can draw up to 10 amps at 10v there pretty strong, ive also thought about these there very cost effective http://www.goldmine-elec-products.com/prodinfo.asp?number=G18980 and they have a backshaft!!
So for accuracy and power what is the best choice for a rover, I could look at specs till im blue in the face but as far as practical experience its mostly all with DC motors and a little servo stuff.
What would be my best option for motors? A closed loop system is cool becuase you can use things like crazy drill motors etc if you need more power, although looking at what smaller motors can do I think big honkin 10 amp motors my be over kill! Ive also noticed there are geared servos out there, but Im not sure how fast these would go, and as far as steppers im completely clueless of there price to power range, looking at robot shop the biggest stepper is like 4vs, also to get a smooth drive you would have to implement micro stepping right? Basically im just trying to figure out the most cost effective option for a motor system where the posistion is controlled or and detectable. Gearing servos seems like the easiest choice but like I said im not sure of its power and speed. Im looking at the bot being somewhere in the 10lb range give or take 5lbs. My idea is just to use 4 ryobi drill motors with there gear box and batterys but like I said that may be over kill as the motors can draw up to 10 amps at 10v there pretty strong, ive also thought about these there very cost effective http://www.goldmine-elec-products.com/prodinfo.asp?number=G18980 and they have a backshaft!!
So for accuracy and power what is the best choice for a rover, I could look at specs till im blue in the face but as far as practical experience its mostly all with DC motors and a little servo stuff.
442 x 306 - 40K
Comments
I think servos are too small for a 10lb robot unless you are okay with it moving really slow. Steppers are not very efficient so I would not use them. Drill driver motors can work well providing you size the wheel appropriately. Some have the added benefit of a built in clutch.
But otherwise, for any robot of decent size you need to go with a DC motor, either brushed or brushless.
Here is an example where i drew insperation from..
http://letsmakerobots.com/files/field_primary_image/Stair_Climber_3.jpg
And here is my idea
If someone could tell me what that sort of wheel set up is called id appreciate it