

Spin: A 4-meter 400kg Robotic Sailboat with Six Propeller Chips
 ParallaxInsider
Posts: 5
ParallaxInsider
Posts: 5
"SPIN is just like any other hobby robot except for being 14' long and 18' tall, weighs 800 pounds, has 13 degrees of freedom, and gets gallons of seawater poured into it." -Christopher Miller
This project was submitted to Parallax by Christopher Miller.
Sailing photos courtesy of Lin Pardey.
Spin is a modified 2.4mR class single-person keel boat. They're commonly used by Paralympic sailors. I bought mine last year when it was retired from a disabled sailing programme in Auckland with the goal of transforming it into a robotic sailing test vehicle for navigation instrumentation and yacht performance optimisation software. Being a bona-fide geek I've traditionally named my boats after programming languages: Seaplusplus (the 52' yacht I sailed to NZ on), my power boat Java, and now Spin! The name Spin works really well on many different levels for this project. Spin also stands for Science Project for Instrumentation & Navigation. I can also say to people "Go ahead, take her for a Spin." or "This crazy project makes my head Spin!"
This project has been interesting to develop largely because of the functionality and well-thought design of both the Propeller and its Spin high-level language. My professional background has been mostly object-oriented C++ development for Windows since '97. The Propeller is really the first microcontroller I've encountered that made me go wow - I could really make good use of that! (I worked on the Macintosh OS at Apple from '87 to '93, did server development at AOL from '94-'97 then sailed across the Pacific in '98 and settled down in New Zealand.)
Here is what Spin has and does:








This project was submitted to Parallax by Christopher Miller.
Sailing photos courtesy of Lin Pardey.
Spin is a modified 2.4mR class single-person keel boat. They're commonly used by Paralympic sailors. I bought mine last year when it was retired from a disabled sailing programme in Auckland with the goal of transforming it into a robotic sailing test vehicle for navigation instrumentation and yacht performance optimisation software. Being a bona-fide geek I've traditionally named my boats after programming languages: Seaplusplus (the 52' yacht I sailed to NZ on), my power boat Java, and now Spin! The name Spin works really well on many different levels for this project. Spin also stands for Science Project for Instrumentation & Navigation. I can also say to people "Go ahead, take her for a Spin." or "This crazy project makes my head Spin!"
This project has been interesting to develop largely because of the functionality and well-thought design of both the Propeller and its Spin high-level language. My professional background has been mostly object-oriented C++ development for Windows since '97. The Propeller is really the first microcontroller I've encountered that made me go wow - I could really make good use of that! (I worked on the Macintosh OS at Apple from '87 to '93, did server development at AOL from '94-'97 then sailed across the Pacific in '98 and settled down in New Zealand.)
Here is what Spin has and does:
- Six onboard Propeller microcontrollers perform sail control, system monitoring, & navigation
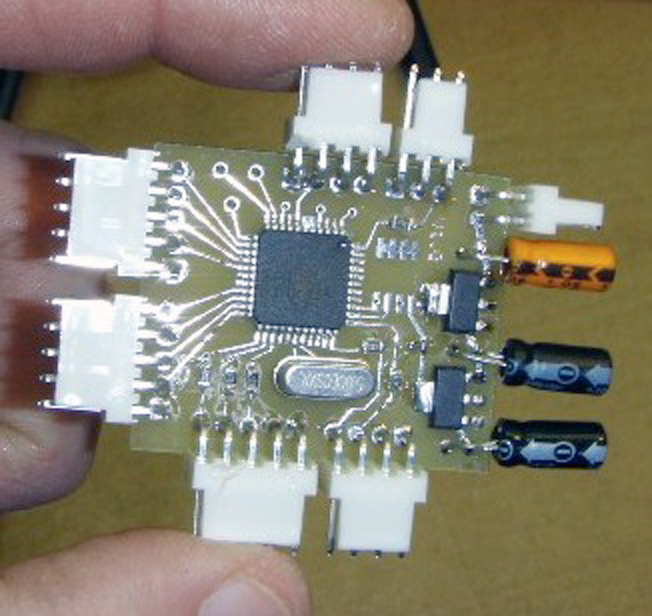
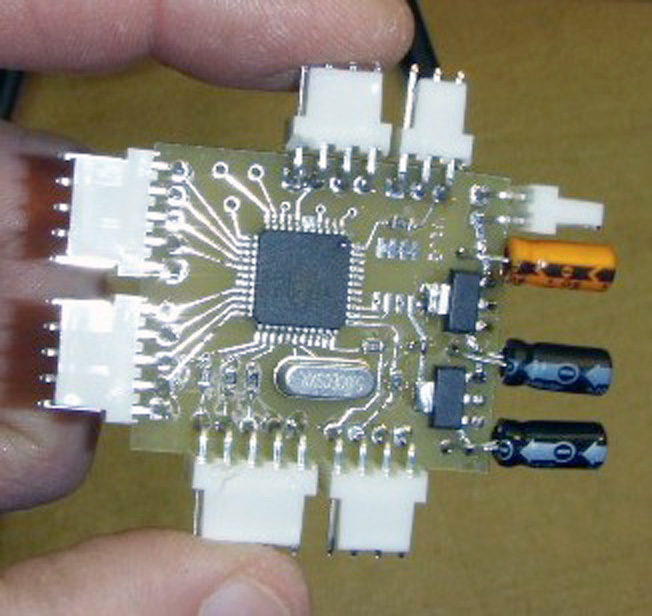
- Each Propeller resides on a custom Spin Controller PCB I designed
- Each Spin Controller supervises up to 4 motors / actuators, has sixteen 12 bit A/D channels
- Sail control lines (sheets) and rudder are controlled using 7 gear motors and 3 linear actuators (so far)
- Each motor has a dedicated motor controller receiving packetised serial commands from a Spin Controller
- Each winch's position, velocity, current, and motor temperature is measured at 30 Hz.
- Motor end limits, home position, and max current stored in EEPROM
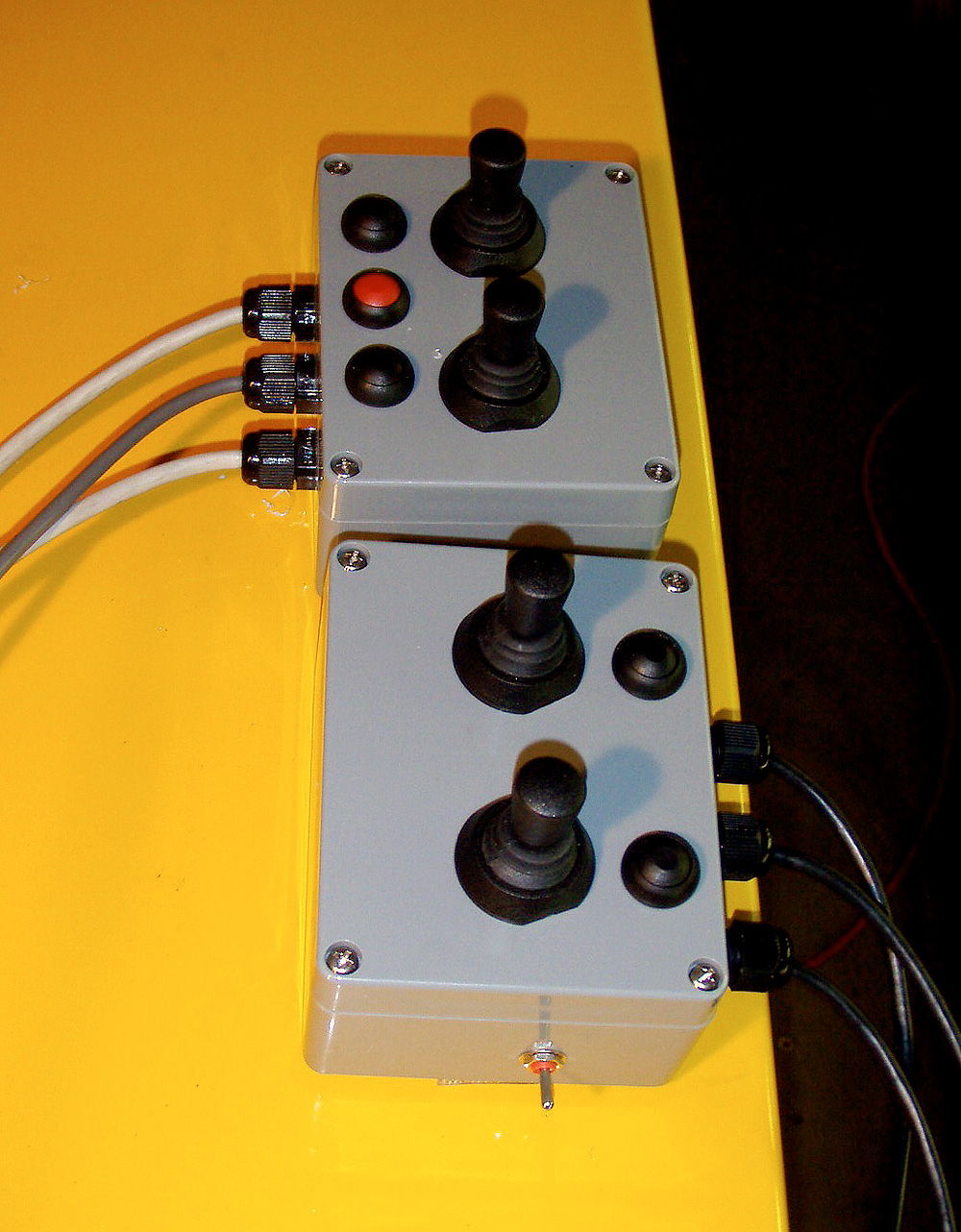
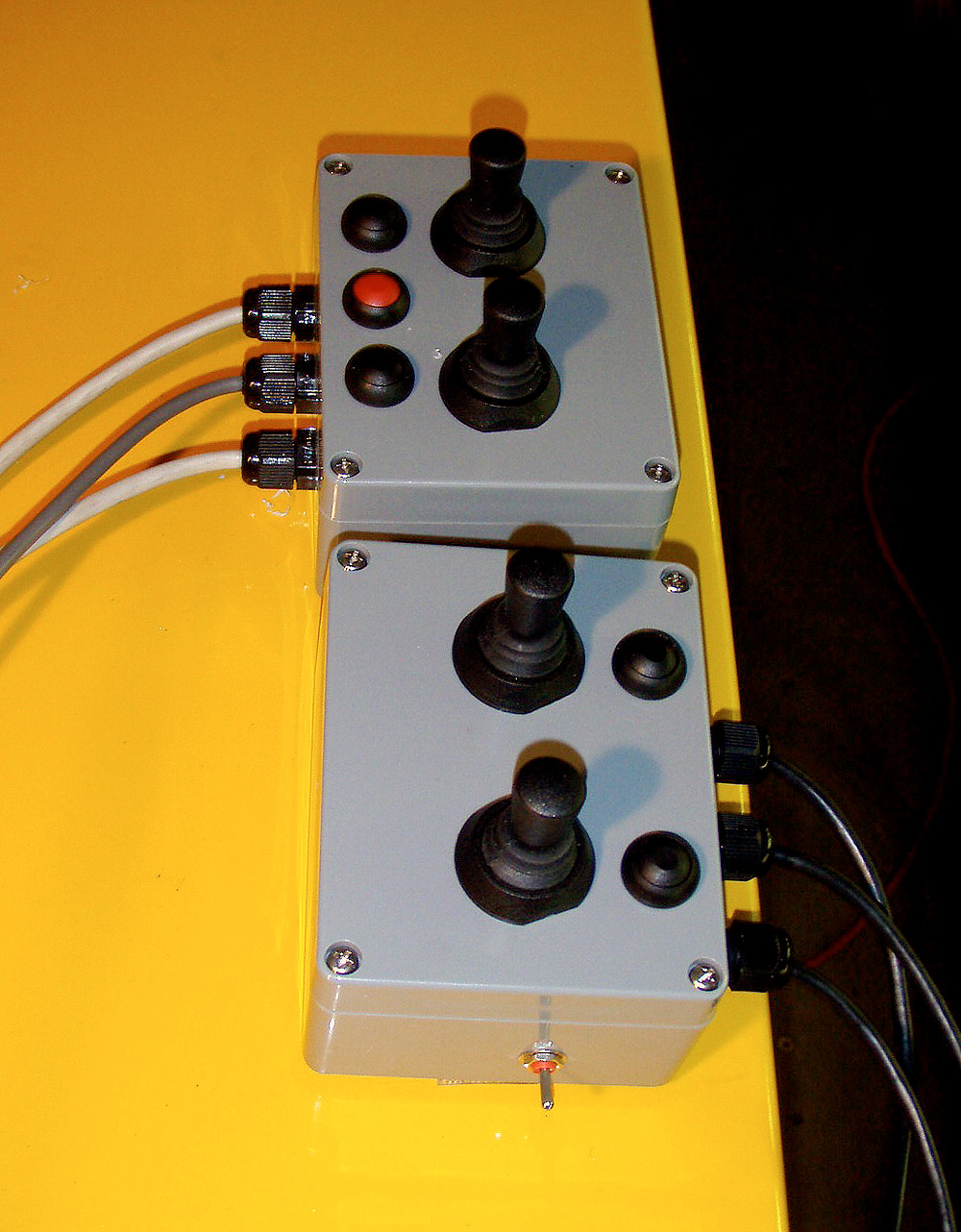
- Spin Controllers simultaneously accept manual joystick, R/C PWM, and telemetry commands
- Auxiliary propulsion is provided by a 600W trolling motor which also generates power while sailing
- Navigation system includes AHRS (heading, heel, pitch), GPS, 4 boat speed sensors, and 3 anemometers
- Communication system includes 900 MHz long range telemetry and 2.4 GHz wi-fi.
- Spin also has onboard cameras which measure sail shape in near-realtime (aka Sailvision)
- Spin is carried on a motorised trolley with dual 24V, 60A gear motors. Trolley can pull 300 kgs horizontally for going up gangways from floating pontoons.

1024 x 768 - 260K
652 x 616 - 112K

1024 x 632 - 79K

1024 x 1002 - 486K

724 x 1114 - 361K

796 x 652 - 181K

1000 x 665 - 279K

750 x 1000 - 340K
1000 x 1282 - 362K

619 x 1054 - 378K
Comments
I also find the board design interesting. I know that the marine environment is very harsh on electronics. How is that taken into account? I don't see a solder mask, which seems like it would dramatically lower the protection from board contamination and voltage leaks between traces.
I find robotic sailboats fascinating. There is something about using a computer to control one of mankind's most useful machines that is appealing.
Seaplusplus
thank you for that
tears in my eyes ...
Mike
Please explain more about the Sail Vision for looking at sail shape?
Very Cool!