

Two servos simultaneous rotation robot arm
 hellobazov
Posts: 5
hellobazov
Posts: 5
Hello!! I build a robot arm, and I have two servos which are connected to one link, in order to increase the moment of the arm. I know that BS2 can send pulses to different servos with the difference of couple ms, but not simultaneously, on the other hand I have my two servos connected to one rigid body, so I have to turn them without any difference.
If the arm with some weight should keep some angle, then technically at each moment only one servo will hold this angle (and all the weight of the arm), and I won nothing, or there is a solution with BS2?
Thank you!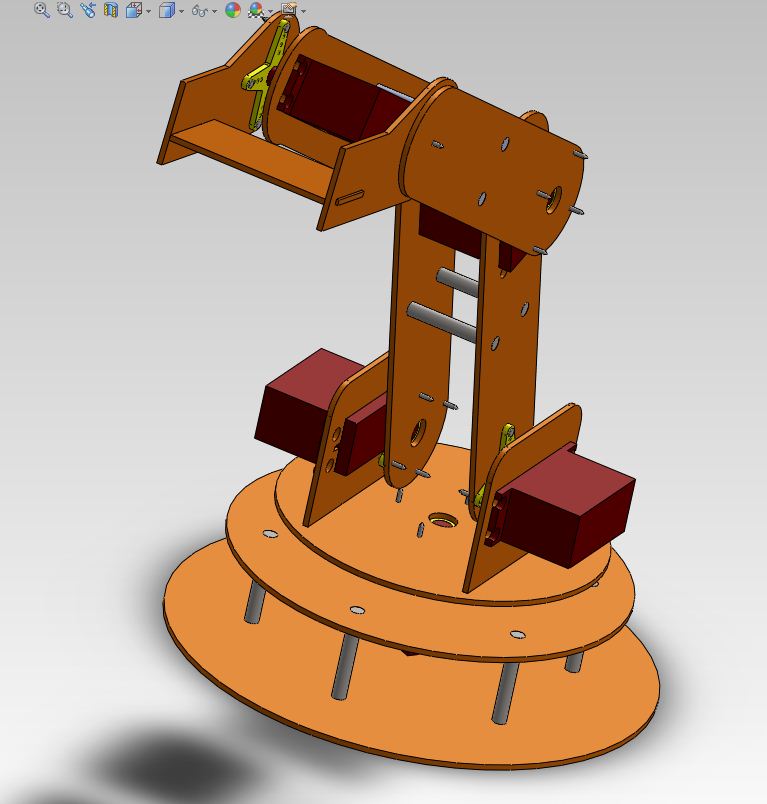
If the arm with some weight should keep some angle, then technically at each moment only one servo will hold this angle (and all the weight of the arm), and I won nothing, or there is a solution with BS2?
Thank you!
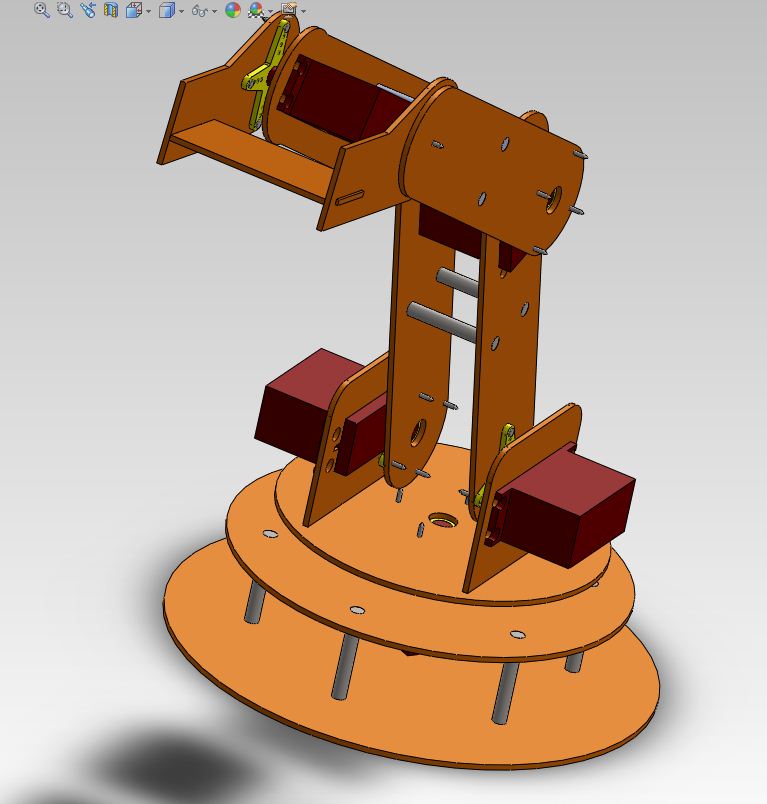
767 x 804 - 63K
Comments
In other words, if the motion of these two servos is supposed to be exactly the same in direction and degree, you might be able to take the single output from the BasicStamp and share it with the two.
Will that work for you? This would be simultaneous and I doubt that you would stress the output pin of the BS.
Edit: And yes, you can connect both servos to one Stamp I/O pin.