

Tcm8230md
 tholberton
Posts: 41
tholberton
Posts: 41
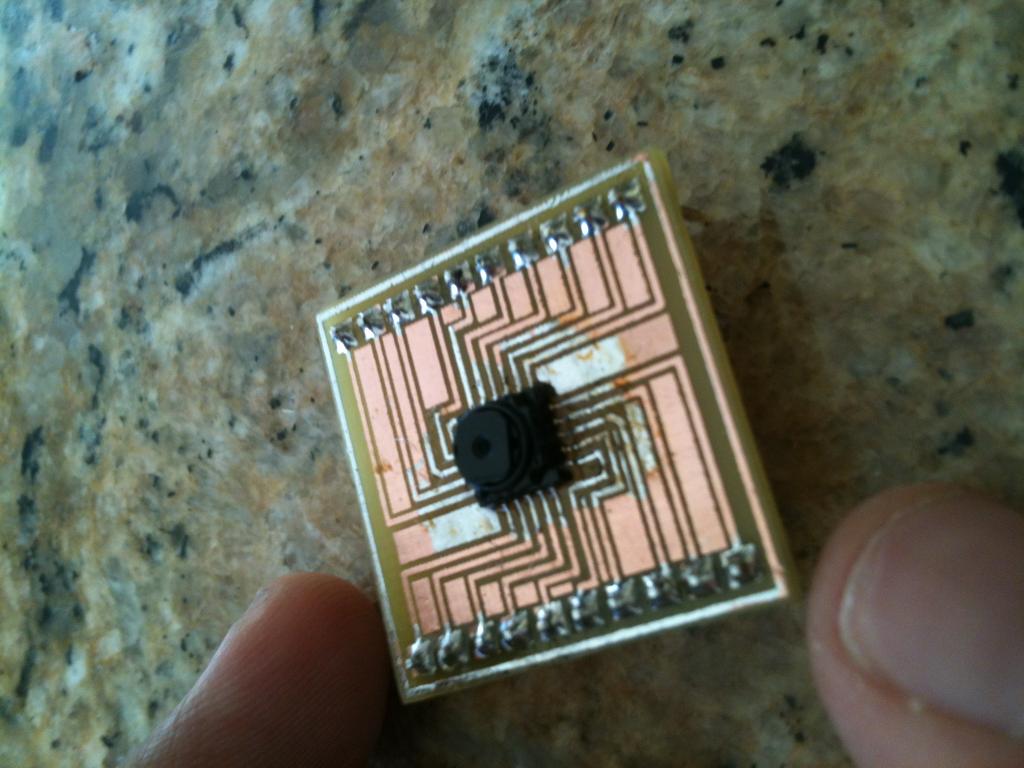
Just made a little breakout board to start prototyping the TCM8230MD with the propeller!
Tomorrow I'm going etch the circuit for the three regulators it needs and then Tuesday or
Wednesday I should receive the level translator for the I2C interface. I'm pretty excited, haha
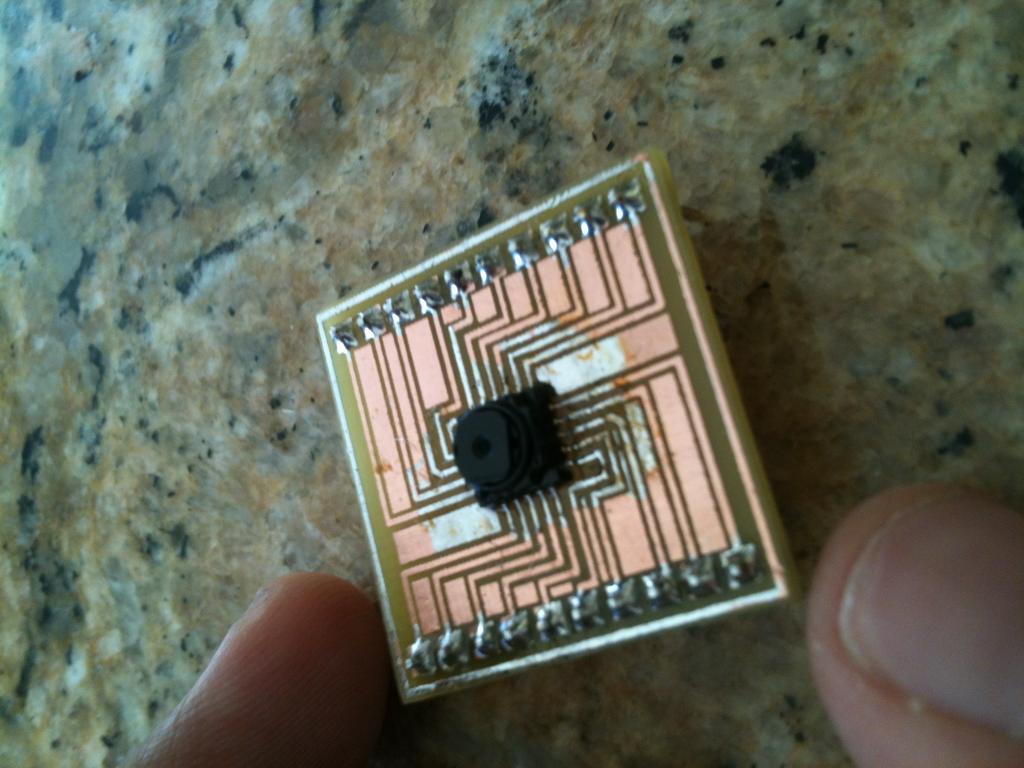
1024 x 768 - 88K
Comments
I've had one of these cameras for several years. I haven't gotten as far as making a breakout board for it myself.
What are the three voltages you need? On the datasheet I see a need for two voltages, 2.8V and 1.5V.
I wonder if you could get by without an I2C level translator. If you pulled the I2C lines to 2.8V, the Prop would still be able to read it. Since I2C only pulls the line low, the Prop's 3.3V should never be on any of the data lines (assuming no programming errors).
Do you have a plan for writing software to use with this camera? The datasheet seems a bit intimidating to me. Is there code from a different uC you want to adapt to use with the Prop?
I've started making PCBs myself (though a fab house). You remind me of my desire to use this camera with the Prop; I think I'll try to have a PCB made for the camera.
Thanks for posting the picture. I hope you keep us updated on your progress.
I'm taking advantage of the holiday weekend to finish a large shed in which to store the vast quantities of junk I've already made.
Well - my lovely wife has gone shopping for some new movies to add to our collection. In the meantime (with Nazz softly playing in the background), I'm multiplexing between a burn-in test on a product (the big silver box) and tinkering with a tank tread upgrade to my Boe-BOT.
***Edit - oops! Sorry...didn't mean to instigate a thread hijack.
I was sentenced to 3 days hard labor and don't even recall upsetting the warden!!
Back to topic. Looks like a fun project. It's always interesting to see the Propeller stretched in any dimension!
Btw, welcome to the forums!
Looks cool! Looking forward to the result.
As for the code, I'm going to have one cog drive the I2C and other cogs process the data. Hopefully
that will give more of a window to process the data.
soooo... to drive the line high I write? and to drive it low I then write
Let's assume your I2C bus are on pins P8 and P9. If you defined the pins in a CON section like this:
Then early in your PASM code you'd create a mask for these pins. I'll just write code for creating a mask for the clock pin; you'd make a mask for the data pin the same way.
mov clockMask, #1 shl clockMask, #I2C_CLOCKWith an I2C bus, you'd want both lines pulled high, so you'd connect one end of a 10K resistor to the 2.8V source and the other to P8. A second resistor would be connected to 2.8V and P9. These resistors are now pulling the two lines high. As long as the lines aren't connected to ground they will be in a "high" state so the Propeller pins never need to be driven high. As long as P8 and P9 are inputs, these two lines will stay high (unless some other device like the camera pulls the line low).
So to communicate on the bus, the Prop sets P8 and P9 low and only changes between being an output and an input to send its logic signals to the camera.
The pins are in a low state when the Prop is started up so there doesn't need to be any code written to make the pins low. The pins also start as input pins so by doing nothing the lines are high.
To drive the pins low, the pins are changed from inputs to outputs (again, I'll just show how to code for the clock line).
When you want the line high again:
Whenever the line is being driven low by the Prop, no other devices on the line can communicate so the Prop needs to "release" the I2C lines (with the andn dira statment) before listening to the line. I think this type of setup is called "open drain".
You also don't haPpen to knOw how to find pin one do you?