

Propeller Quick start and sabertooth 2x25 motor driver with MSRS Goodbye Parallax
 jdolecki
Posts: 726
jdolecki
Posts: 726
Does any body have this combination?
I just fried my Quick start board so now I'm all out of Parallax boards
Well not really I still have a Propeller starter board. But im not going to fry that.
Some body has to know why the usb power is making it to the motor power and over current my Com port?
Anybody know about the 2x25?
I filtered the pwm lines according to the Dimensional Engineering sheet with a 10k resistor and .1uf cap
Now I have to build my robot with Arduino boards cause that's all I have left.
Also what happen to the Gadget Gangster propeller board were can i send mine to get repaired.
What about the quick start board does Parallax repair them?
So good bye
I just fried my Quick start board so now I'm all out of Parallax boards
Well not really I still have a Propeller starter board. But im not going to fry that.
Some body has to know why the usb power is making it to the motor power and over current my Com port?
Anybody know about the 2x25?
I filtered the pwm lines according to the Dimensional Engineering sheet with a 10k resistor and .1uf cap
Now I have to build my robot with Arduino boards cause that's all I have left.
Also what happen to the Gadget Gangster propeller board were can i send mine to get repaired.
What about the quick start board does Parallax repair them?
So good bye
1024 x 765 - 99K
Comments
What pins are you using to output the signal to the Sabertooth? If they're shared with something else you could possibly do some damage.
Having said THAT....
1. You may be confusing energy stored in the Sabertooth's capacitors as coming from the USB port.
2. There might be a solder bridge on one of the boards that is creating an unusual situation.
3. You may have had a reverse polarity on one of the boards that is confounding us all. Even a momentary reverse polarity hook up is enough to cause permanent damage. Are you trying to ignore such an event and hoping for the best?
Certainly, a damaged Propeller Board might do a lot of odd things. But it seems that you never found the reason for the damage. Without that reason, we are all guessing what to do to help you.
Consider the following.
A. We want to help, but have no real way of doing so.
B. Parallax Customer Service is the place to resolve your damaged QuickStart board. But I strongly suspect that Parallax would want to examine the damaged board in order to identify whether it is indeed a manufacturing defect or a user problem.
Talk to Parallax Customer Service as they might just swap the board with a new one for the sake of goodwill. But if you do burn up a second board via the same setup, I suspect they will begin to talk about it being a user problem.
Does the Sabertooth 2x25 function normal when used independently?
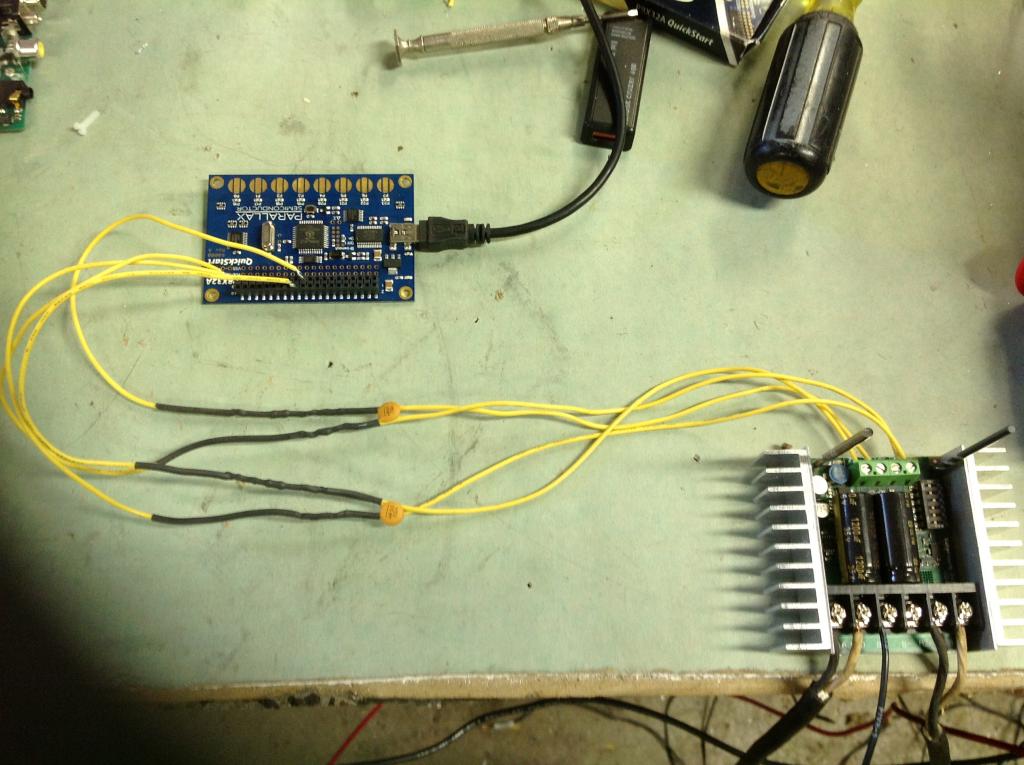
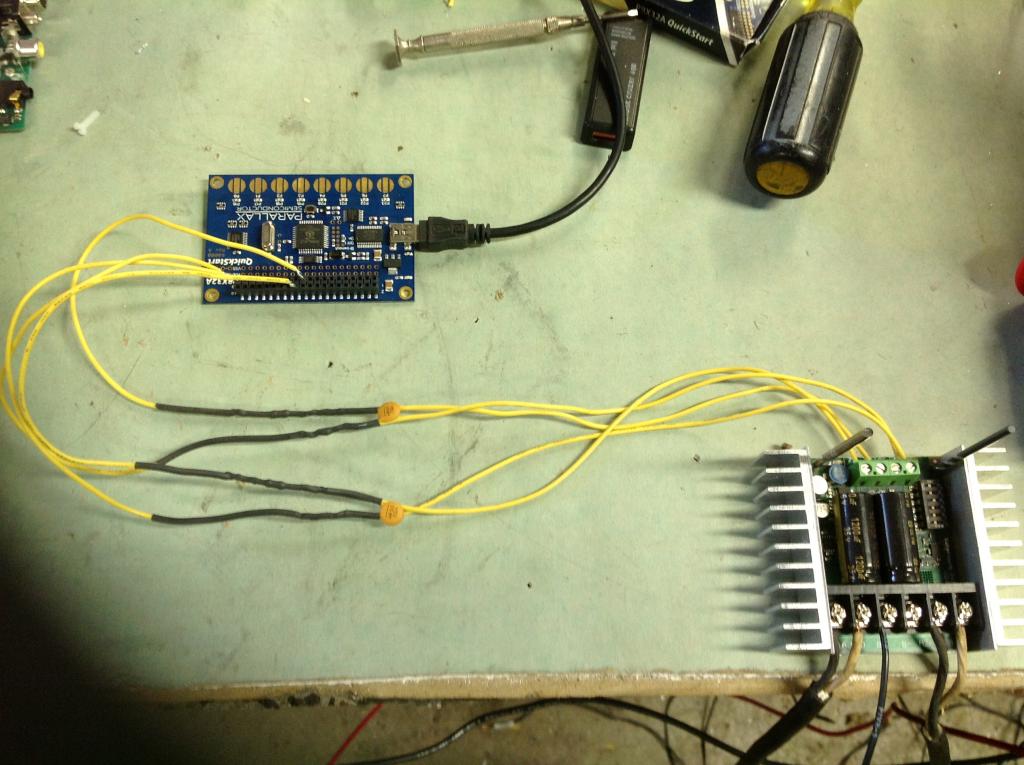
3 wires from the Quick-start to the 2x25
Ground on the Quick-start to 0V on the 2x25 cause that's what the hook up says in the 2x25 directions for PWM.
"The 0V connection is the signal ground for the Sabertooth. In order to receive input signals
correctly, it must be connected to the ground of the device sending the signals."
PWM for the 2 motors pins 20 and 23 go to S1 and S2.
I doesn't get much simpler than that.
Same hookup on 2 different boards.
I have no way of checking the damage to my boards.
It's a brand new board from Dimensional Engineering. It works using RC transmitter and receiver.
If some one at Parallax want to test It I will send them my 2x25 board and they can try it?
I would like to be running before the Expo in June so I can bring it there.
You can come here or I can meet you.
I will buy pizza and Pop for your effort.
If someone would draw up a isolation circuit for the signal lines between the Propeller and the motor driver i will try again
with a new Quick-start board for R shack
I
The 10K resistor effectively provides an isolation circuit between the Propeller and the Sabertooth signal lines.
The whole thing runs off of ( 2) 17Ah 12 v batteries in series (24v ) The CPU power supply and 2x25 are the only 2 things directly connected to the batteries.
Everything else is on the back side (Load side) of the Power supply
Quick-start is powered from the USB port. The kinect get its power from a hard drive plug.(12dc)
Even the monitor is 12dc.
The 2x25 is fused directly to the battery in parallel with the CPU power supply.
There is no 120Ac or any thing external connected to the system.
The Eddie Firmware outputs the motor PWM on pin 20 and 23 of the Propeller which is spot 21 and 24 on the quick start connector.
The quick start also has 2 leds on pin 20 and 23 so I can see the PWM signal when I command forward
I know you guys think I crazy. but it runs those 2 350 watt wheelchair motors through my usb port until it overloads.
thanks
I
I know that issues like this can be frustrating but don't give up! There has got to be an answer here and we may be dealing with multiple problems.
On the motor controller are you saying that it just has the motors connected and no battery? If you connect a radio to drive it does it also move? If the theory about feeding power in through the PWM lines is valid then it should act similar.
From the picture that you posted it appears that there are four wires between the Quickstart and the Sabertooth controller. Is that fourth wire just another ground wire? The caps may be recommended to standard R/C gear but probably aren't needed when connecting to the Propeller board.
We have no idea on how the Sabertooth controller is internally wired so we only have to guess about that. Even so I can't see how it could power the motors through the PWM signal line. with a resistor in-line with the PWN lines there just isn't enough current available to move a motor. An LED perhaps but a motor no. Most of those types of controllers have heavy filtering and caps on the motor line so my best guess is that they are still charged and acting like a small battery to move the motor until drained.
Are you sure your Quickstart boards are dead? I just recently became aware of an issue with those boards where you can only connect to them once. In order to see them again you have to disconnect the USB and re-connect it. There is a fix by adding a resistor to the board. Checkout this thread:
http://forums.parallax.com/showthread.php?140078-Weird-problem-uploading-to-QuickStart
At least you can see if the Quickstarts are really dead. If that and your Gadget Ganster board are truely dead then it is probably either the Prop or FTDI chips and those aren't too bad to replace.
The Quickstart and Gadaget Gangster boards are using 3.3V I/O and it may be that that Sabertooth controller doesn't handle that well. Not all devices that handle R/C inputs are created equal and handle the inputs the same. What may be a valid signal for one servo or controller may end up being in a grey area and somewhat undefined causing erratic behavior. I would add some sort of buffer between the Prop and Sabertooth. One that has worked well for me is just using a simple 74HC14 chip. I power the chip itself at 5V then use a 1K (to 2.7K) resistor between the Propeller pin and the input to an inverter. Then connect the output to the inverter to the input of the next and that output of that to the sabertooth. Do the same thing for the other signal line and then connect the inputs of the two remaining inverters to gound (CMOS inputs can't be left floating) The 74HC14 acts as a buffer between the two devices and also brings the outputs so the have a 5V swing which is better for many controllers.
I prefer using this method or one of the larger 74HC buffers to interface instead of the 3.3V to 5V translator chips (used on boards like the servo controller) since those translator chips can have their own issues and have caused me issues on my own projects.
I've used some opto-isolator chips like the 4N26 with the propeller mainly for relays and also on inputs (to tell if a charger is detected) but haven't tried them for an R'C style PWM signal. I suppose it would be worth trying if all else fails.
Robert
Sure, it is just a guess, but worth considering. Pulling a Propeller I/O to below zero can damage the port.
I know you have been over this many times and you have a goal and deadline. But we have all gotten stuck in similar situations only to discover something obvious was overlooked. If you need to swap boards with Parallax, you need to talk to Parallax Customer Service - not the forum as nobody here has authority to make arrangements and promises.
I am not clear if you have tried to reprogram the Propeller Quick-Start and failed. If it will take a program, a blinking LED check of I/O should verify it is working properly. If you can't locate a serial port, this suggestion is useless.
I am not sure that optoisolators are the best form of isolation as they may affect the PWM timing though the 50hz cycle is quite slow. But using a 74LS07 to buffer between the two boards should effectively isolate the Propeller and that chip should be the one to get fried in anything is really wrong. The added time delay is between 15 and 30 nanoseconds, but pulse width and timing should be spot on.
If you don't want to deal with open collector chips, use the 74LS04 and run each signal through two inverters to have it come out normal (and at 5 volts if you want).
on the quick start board i get "Com port overload" from the pc.
I sent an e-mail to tech support 2 weeks ago no response
I called and the kid I talked to seemed more confused than i am after I explained what happened.
And nobody from parallax has chimed in on any of my post except to say they are watching be build my robot I guess they are waiting for
me to give up and buy an Eddie board.
If it looks like the Propeller boards are dead then it would be worth calling Parallax again. In the event the person you are talking to can't help then ask them to escalate the issue to someone else there. I've always found that they are ready and willing to help.
As far as the turn around time I suspect Parallax was overwhelmed with the recent Parallax Propeller Expo and also the Maker Faire and still recovering and catching up from those.
Sounds like you have a short on your board, disconnect everything external to the board and if you get the same results it's the board. Maybe if you post a high resolution pic of the front and back someone here might be able to help you.
If your PC is saying the board is drawing too much current stop plugging it into your PC. Get out a multimeter and check for a short between the ground and +5v on the usb side with nothing plugged into it, or on.
Robert
http://www.dimensionengineering.com/datasheets/Sabertooth2x25.pdf
With the 10K resistors inline with the Propeller I/O pins I can't see how they would be damaged. However, if they weren't inline when first connecting the controller then I suppose it would be possible to damage those or the prop depending upon how the controller is wired and what mode it is in.
Robert
1 - off (down)
2 - on (up)
3 - on (up)
4 - off (down)
5 - on (up) / ?? This could go either way. Experiment!
6 - on (up) / I would NOT use the Microcontroller mode since this eliminates the failsafe if your program hangs or crashes
That 10K resistor and cap are for Analog/PWM mode which is probably not what you'll want to use for this controller. Doesn't seem to apply for R/C mode.
If you use this controller I would also put a large relay on the power for it so you can use a Propeller pin to turn on/off the drive. Also if this is a large robot put a safety drive cutoff switch on the outside of the robot so you can manually kill the drive power if it tries to run you down. (speaking from experience here) That way you can use the Propeller to power up the drive system when you want to use it and power it down to conserve power.
Since the controller mentions automatically calibrating the R/C inputs it may be better to have the drive object start up and send out valid pulses before bringing up the Sabertooth controller. (May or may not be an issue)
I found issues between the Product page for the Sabertooth controller and their datasheet that they need to be called out on to clarify. It mentions on the Product page that the 5V can supply 1A yet in the data sheet they say to only use 100mA or when used a 12V battery (which is usually over 12.6V) that it should only supply 10mA which isn't much at all. They need to clarify that spec and make them consistent on the product page and datasheet.
That controller has a lot of nice options but most of those only apply if you are using a Radio control. For your robot you really need just the basics have have it act like a pair of separate H-Bridges in R/C mode to act like a large continuous rotation servo.
Now, if you want to control it like a pair of H-Bridges that each have a separate direction and on/off control (PWM for speed) then it doesn't appear to support that mode and you'll either want a different set of H-Bridges or use a different control object that uses R/C style control.
Robert
Will try all this, this weekend
Can you clarify what you mean by "CPU power supply" and how all of this is connected? Is the CPU supply responsible for the USB power? I've not met a "CPU power supply" before that runs on 24V, this rings lots of alarm bells for me.
http://www.mini-box.com/M4-ATX?sc=8&category=101
Is normally use in car computer systems
it will work between 6-30 v dc
I really think you should unplug everything from the board, check for a short between ground and +5 on the USB connector with the power switch in the on and also the off position. To me it sounds like it has to be a short, there's no way that a Prop is going to pull 500mA idle.
Also check your regulators, they're easy to replace.
After having many looks at the image in your first post I have a question.
Do you have the -ve/0V for the motor supply connected to the 0V terminal on the motor side connector? I can see the motor wiring and the +ve wire for the motor supply but it is not clear whether there is an 0V connection.
Cheers
At this point, keep pushing Parallax's Customer Service. I am NOT sure that is the same as Tech Support. You originally inquired about a repair for the board and Parallax often prefers to just swap at very reasonable terms for the sake of goodwill.
My own feelings are that the Sabertooth board is a bit of a 'black box' and since it doesn't provide a schematic, it could have put a higher voltage back into the Parallax board.
As best as I can recall, Parallax usually uses the +5 from the USB port ONLY to power the USB chip - everything else on their boards usually depends on an external supply. This is a conservative approach that is very much intended to avoid overloading and damaging USB ports.
Have you tested all your computer USB ports with other external USB device to affirm they are recognized and working. It would really be a shame if you have some how damaged a computer's USB port? And I am not very comfortable with making suggestions on how to test as anything you plug in might get fried if the USB port has more than 5VDC and 500ma output on any of its lines. Awkward as it is, you may have had a coincidental USB port failure.
Parallax needs the damaged board to determine if it is the source of your woes.
Parallax has at least three Propeller boards that can use USB power without an external supply.
Besides the QuickStart which John is using, the C3 and PropBOE also can be powered by USB.
The Prop Protoboards and most of the other Propeller boards I can think of, do require an external supply.
I would sure help if DE would publish a schematic for their Sabertooth 2x25.