

Scurrier
 GeorgeCollins
Posts: 132
GeorgeCollins
Posts: 132
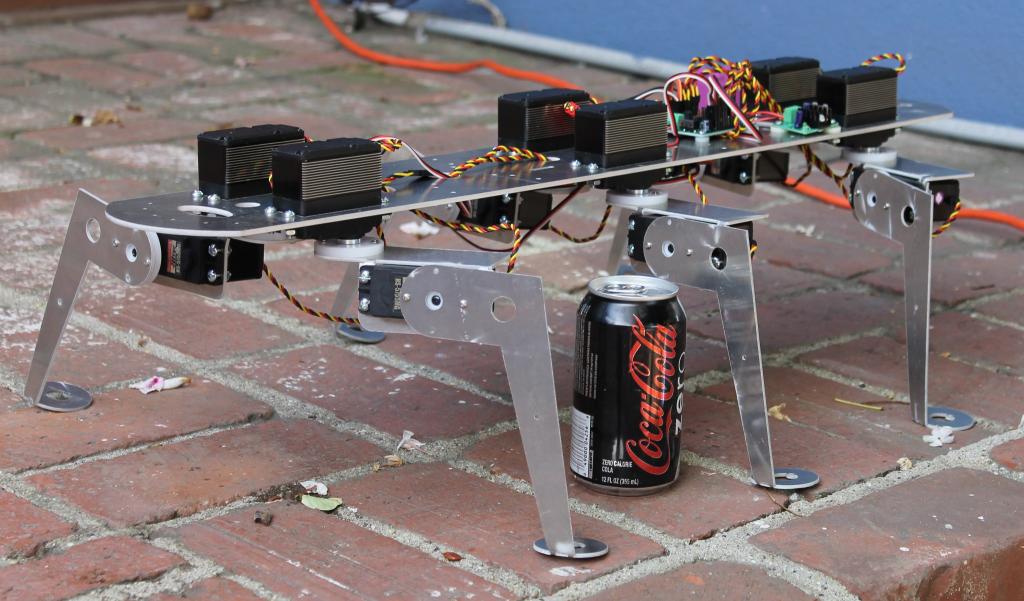
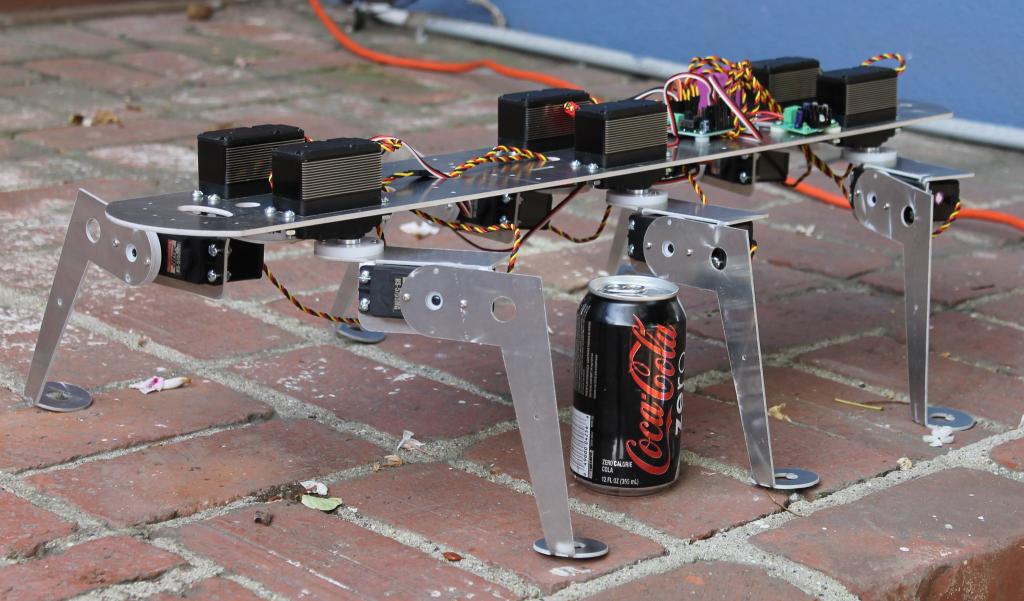
Here is a Scurrier, a robot hexapod I entered in the Open Walker Challenge at Robogames. Scurrier is a very straight-forward hexapod. The only unusual features are that it is a bit big and light. I also made it long and thin (as opposed to round) so that it would go fast in a straight line. The frame is aluminum sheet cut by Big Blue Saw. The robot uses a propeller USB servo controller that is reprogrammed.
I have made a few walking robots now, all of them using propeller chips. I love how easy it is to control standard servos with a prop while having other cogs free for sensors. Currently this robot doesn't really use the power of the chip since I was keeping it simple to race. But now that I have this robot I plan to put sensors on it and use it's good ground clearance to try some outdoor or cross-country projects.
Scurrier walking:
http://youtu.be/121DuXM5tYE
Robogames Walker Challenge 2012:
http://youtu.be/lrH94NOg13M
I have made a few walking robots now, all of them using propeller chips. I love how easy it is to control standard servos with a prop while having other cogs free for sensors. Currently this robot doesn't really use the power of the chip since I was keeping it simple to race. But now that I have this robot I plan to put sensors on it and use it's good ground clearance to try some outdoor or cross-country projects.
Scurrier walking:
http://youtu.be/121DuXM5tYE
Robogames Walker Challenge 2012:
http://youtu.be/lrH94NOg13M
1024 x 601 - 97K
Comments
I would probably prefer to add hinges ( a pinion ? I don't know the words for it, see below) so that legs go up and down vertically. Already the main weight of the robot is the servos and to add six more servos would increase weight, complexity and fragility.
Mechanical thing I don't know the word for: