

XBee Remote Controller for S2 Robot
 Phil Pilgrim (PhiPi)
Posts: 23,514
Phil Pilgrim (PhiPi)
Posts: 23,514
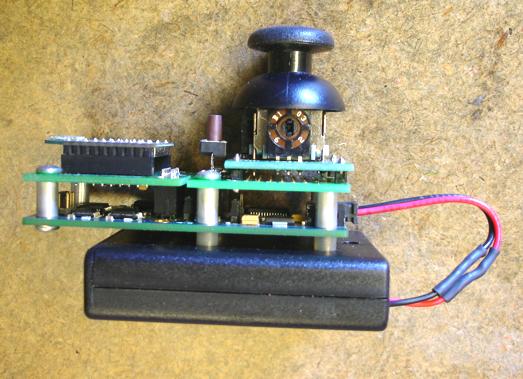
I wanted to test my S2 XBee adapter in a "practical" application, so I cobbled together a remote control for it, using a MoBoStamp-pe, a Parallax 2-Axis Joystick mounted to a Proto-DB, and an XBee-DB (as yet unreleased). All of this is mounted to a RadioShack 4 x AAA Battery Holder, which is wired to the MoBo via a MoBo power cable. I really love the little RadioShack battery-holder boxes. They're dirt cheap and even include an on/off switch. Here's a photo of the remote:

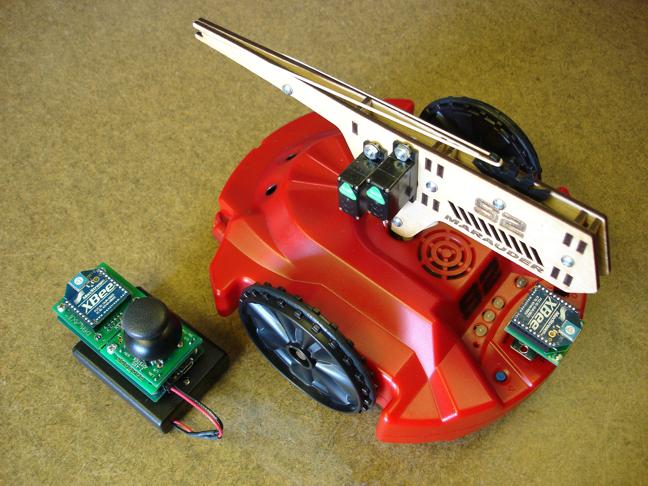
I installed an S2 Marauder rubber band gun on the S2 and added a push button switch to the remote (visible in the above photo) to control it. Here's a photo of the whole setup:

The BASIC Stamp 2pe program on the MoBo reads the two joystick axes by means of the AVR coprocessor's ADC, along with the switch on/off state and continuously sends the raw data to the S2 via the XBee module. Here's the program:
The program running in the S2 receives the raw data from the XBee object and converts it into motion commands for the S2 object and fire commands for the rubber band gun. Here's the code:
Here's a little demo video I made that ties everything together:
[video=vimeo;41867887]
-Phil
I installed an S2 Marauder rubber band gun on the S2 and added a push button switch to the remote (visible in the above photo) to control it. Here's a photo of the whole setup:
The BASIC Stamp 2pe program on the MoBo reads the two joystick axes by means of the AVR coprocessor's ADC, along with the switch on/off state and continuously sends the raw data to the S2 via the XBee module. Here's the program:
' {$STAMP BS2pe}
' {$PBASIC 2.5}
Owio PIN 10
Switch PIN 9
XbOut PIN 5
LftRgt VAR Byte
FwdRev VAR Byte
Busy VAR Bit
DO
OWOUT Owio, 0, [%00011010]
DO : OWIN Owio, 4, [Busy] : LOOP WHILE Busy
OWIN Owio, 0, [FwdRev]
OWOUT Owio, 0, [%00001010]
DO : OWIN Owio, 4, [Busy] : LOOP WHILE Busy
OWIN Owio, 0, [LftRgt]
SEROUT XbOut, 84, [0, LftRgt MIN 1, FwdRev MIN 1, Switch + "0"]
DEBUG 1, DEC3 LftRgt, " ", DEC3 FwdRev, " ", DEC Switch
LOOP
The program running in the S2 receives the raw data from the XBee object and converts it into motion commands for the S2 object and fire commands for the rubber band gun. Here's the code:
CON
_clkmode = xtal1 + pll16x
_xinfreq = 5_000_000
FIRE_PIN = 0
OBJ
xb : "xbee"
s2 : "s2"
VAR
long time
byte LftRgt, FwdRev, Switch, pSwitch, index
PUB start | ch
xb.start(31, 30, 9600)
s2.start
s2.start_motors
stop
dira[FIRE_PIN]~~
case s2.reset_button_count
0: 'Starts here on power-up.
s2.button_mode(false, true) 'Allow button to reset S2.
repeat
if (cnt - time) > clkfreq 'Stop if haven't received data for one second.
stop
if (xb.rxbytes)
ifnot (ch := xb.rx) 'Synchronize to zero byte that precedes each message.
index~
else
LftRgt[index++] := ch 'Fill three-byte buffer with data.
if (index == 3)
move 'Perform motion when entire message has been received.
1: 'Starts here on one button press.
repeat
if s2.button_press 'For each button press, cycle the escpament once.
fire 'Can be used to test fire or reload.
repeat while s2.button_press
PUB stop
index~
s2.stop_now
pSwitch := "1"
time := cnt
PUB move | lr, fr
{{ Fire a rubber band if the button has just been pushed.
Move proportionally to the FwdRev and LftRgt joystick values.
}}
index~
if (Switch == "0" and pSwitch == "1")
fire
pSwitch := Switch
LftRgt &= LftRgt <> 255 'Joystick has an endpoint glitch.
lr := LftRgt - 128
lr &= ||lr > 20 'Accommodate a center dead zone.
fr := FwdRev - 128
fr &= ||fr > 20 'Accommodate a center dead zone.
s2.move_now(fr - lr, fr + lr, 0, (||fr #> ||lr >> 1) >> 3, 1)
time := cnt
PUB fire
{{ This method causes the escapement mechanism to cyle once.
It can be used for firing or loading s single rubber band.
}}
repeat 10
pulsout(FIRE_PIN, 1100)
waitms(20)
repeat 10
pulsout(FIRE_PIN, 1900)
waitms(20)
PRI pulsout(pin, us)
{{ Pulse pin high for us microseconds.
}}
outa[pin]~~
waitus(us)
outa[pin]~
PRI waitms(ms)
{{ Pause for ms milliseconds.
}}
waitcnt(ms * 80_000 + cnt)
PRI waitus(us)
{{ Pause for us microseconds.
}}
waitcnt(us * 80 + cnt)
Here's a little demo video I made that ties everything together:
[video=vimeo;41867887]
-Phil

Comments
He's not nearly as fond of the live ones, though!
-Phil
Thats the coolest homebuilt Joystick ever. :thumb:
Will you be making the XBee-DP adaptor available to the general public?
-Tommy