

Any interesting EXPO projects your willing to share or tease pictures of?
 Beau Schwabe
Posts: 6,576
Beau Schwabe
Posts: 6,576
Here is a little something in the way of a sensor I'm putting together (See attached Image). Hopefully a version of this sensor will be on a Boe-Bot style robot. (Also Pictured)
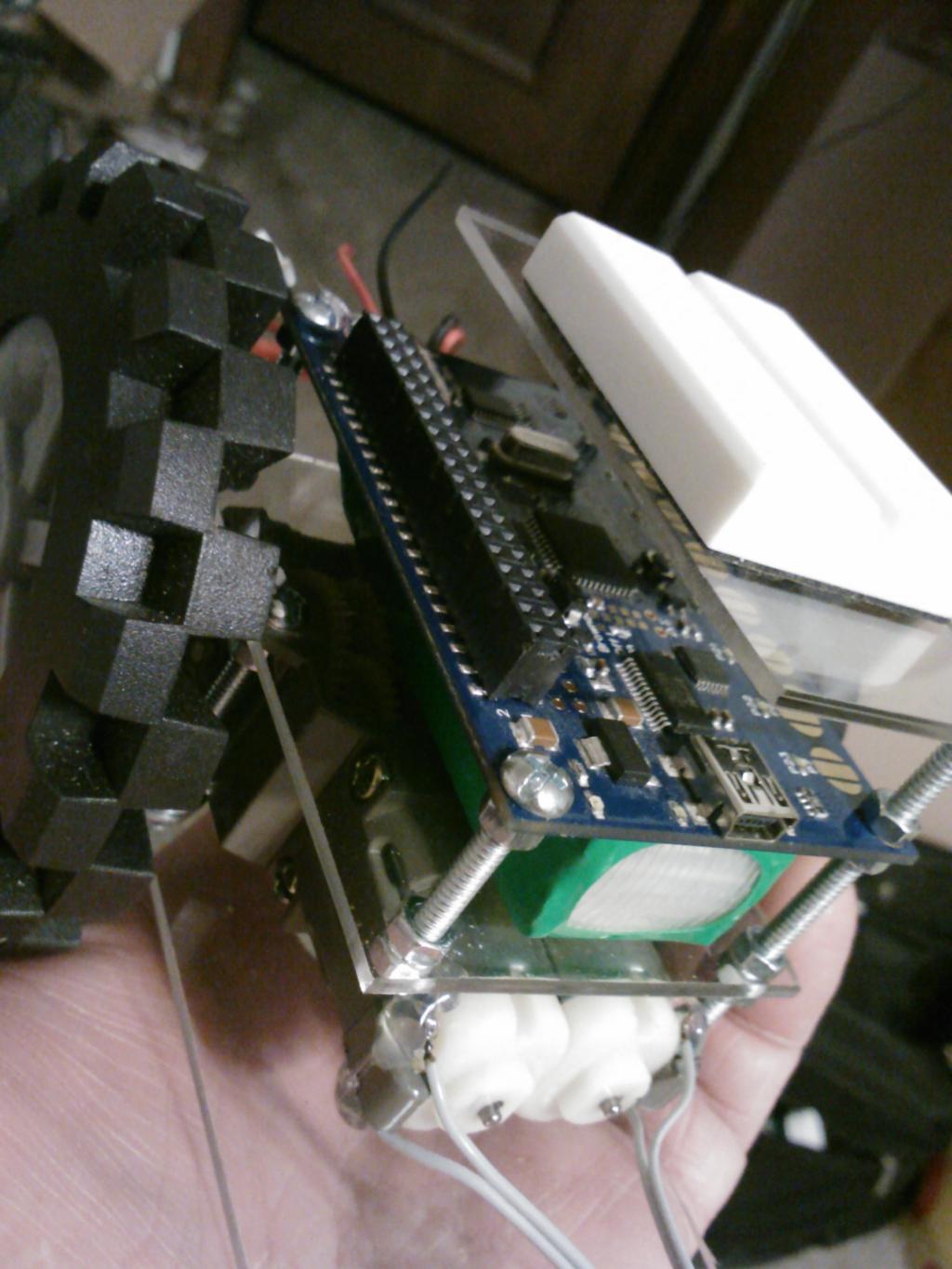
1024 x 1365 - 125K

1024 x 1365 - 119K
Comments
Will that be aimed down at the ground?
Regards
Richard
So, I just started last Friday... Almost have the hardware put together. Hope to start the code work today...
It's the ArdBot chassis with a Quickstart and my Merlin plugin to drive the servo motors.
Also, using "magic sliders" instead of acorn nuts or casters wheels on front and back.
There's a chance this won't work at all on the Parallax course, but I've tested on my driveway and it seems to work OK.
Probably should have looked to see how other people do the sensors, but instead (as usual) I'm going to try it my own
way and see what happens... I'm using 7 proximity sensors in a 3-2-1 arrangement. Going to call the front 3 "long range sensors", the
middle 2 "short range sensors" and the center one "home".
Anyway, here's how it looks right now:
@JLocke - "Is that for navigating the Parallax mine field?" - That sensor could double up and be used like that, providing that the mines were metallic.
@Richard - "...Has anyone made a magnetometer using the Prop?" - Years ago (before the Propeller existed) I attempted a magnetometer to read magnetic fields, but didn't get very far. Something like that would take a lot more turns of wire than I'm willing to do by hand. The coil(s) that I am using have only 32 turns of wire and have a resonant frequency of about 110kHz, however this is subject to change.
This particular coil arrangement can be used to sense metal (even non-ferrous metal) as well as the position of the metal relative to the angle of attack to the sensor.
http://www.youtube.com/watch?v=zq3XWqy2s9s
Hmm, Beau-bot?
"Hmm, Beau-bot?" .... Now your just making fun :-) ... pronounced the same way, but no.
I'll bet that is an antenna for your RFID reader.
"I'll bet that is an antenna for your RFID reader. " - No, it's operating at a different frequency, although this sensors coil arrangement would definitely qualify and work for an RFID reader based on my findings here ... http://www.youtube.com/watch?v=LbMUWwuCx0w&list=UU4_xzR5w_y2ayitbL-d3QOQ&index=2&feature=plcp
I'm not bringing the RFID reader with me to this EXPO, but maybe at some other event.
Are you going to be selling those kits or providing design details? That's a fantastic accessory for the S2!!
Yes, I will have it at UPEW. Not much to it really. Just a small servo hot glued in place with a bit of wire on it.
hey that's really slick! I like that pen holder approach.