

From the "if it's good it's wood" department

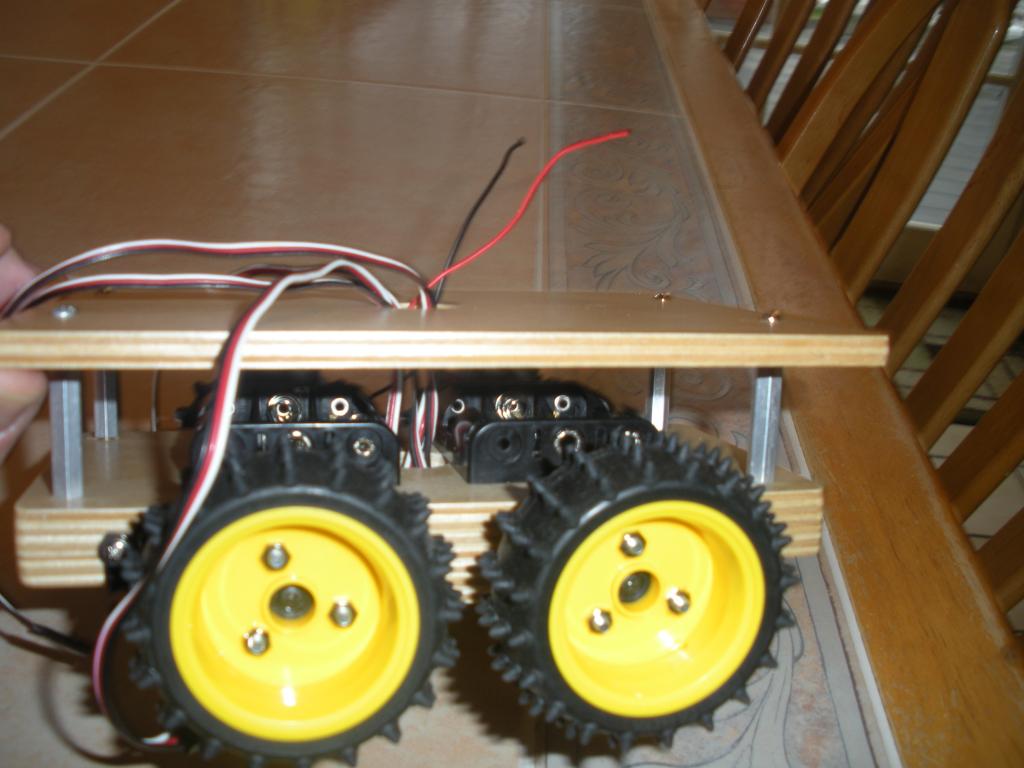
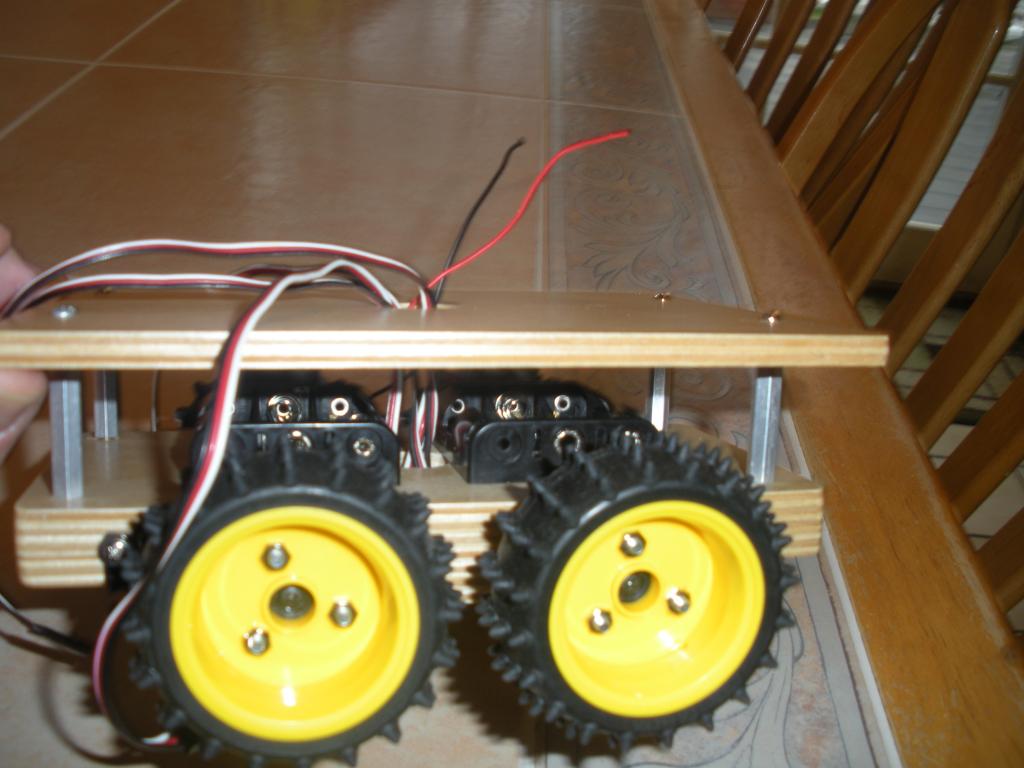
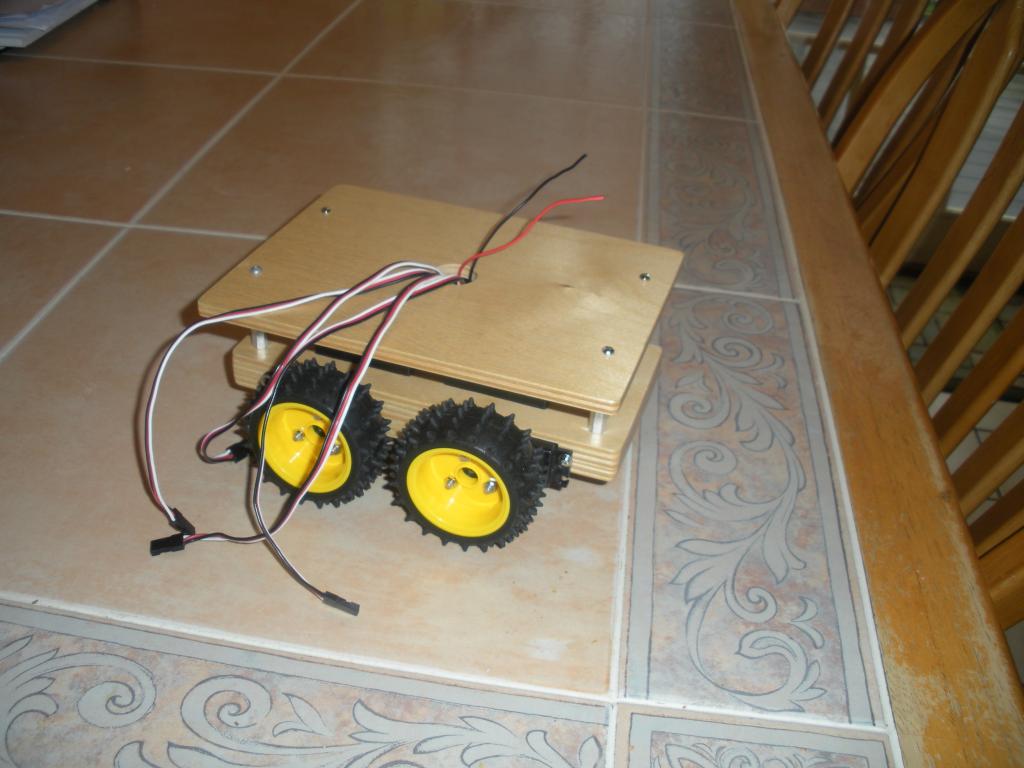
On a happier note than the death of my new to me, but old BS2e board. After two particle board prototypes I decided to commit the 4x4 design to plywood and varnish. Here's the robot the BS2e was destined to control (its loss as the CBA is epvc). I'd say it came out pretty fine looking and any robot controller I pair it up with will produce a nice bot.


The future goal for this bot is the big outdoors and finding its way around the local park. I'm going to pair it a compass and accelerometer and possible a GPS. A tip of the hat to Gordon's Rigel design which was the genesis of my design.
The future goal for this bot is the big outdoors and finding its way around the local park. I'm going to pair it a compass and accelerometer and possible a GPS. A tip of the hat to Gordon's Rigel design which was the genesis of my design.
1024 x 768 - 75K
1024 x 768 - 78K

1024 x 768 - 67K
Comments
That's beautiful.
(yes, I do appreciate the beauty of wood - just don't tell erco!)
-MattG
http://www.imsdb.com/transcripts/Seinfeld-The-Chicken-Roaster.html
-- Gordon
Alfred E. Neuman never said that. However he did say:
"A teacher is someone who talks in our sleep!"
"Most people are so lazy, they don't even exercise good judgement!"
"Who says nothing is impossible? Some people do it every day!"
-- Gordon
Question: Do you have to unscrew those 4 screws in order to install batteries?
Request: Someone said this already but please post how the design works in varying terrain.
I am looking to a very similar design but I am questionable about the performance of wheels and other factors that might hinder performance. Best of luck on continuing your design and great job!
Yes that's a minor downside as the top comes off quickly. But I wanted ground clearance and that required the servos under the bottom deck. A rechargeable battery pack and charging jack would solve this problem.
Martin_H:
I'm having a tough time judging scale here; what size are those battery holders, and what voltage are you running?
-MattG
The robot's top deck is 7" long by 5.25" wide. It stands about 3.5" off the ground. So it's not that big, but won't get hung up on uneven surfaces like a Boe-bot or CBA. I don't plan to go crazy, but I am getting tired of the kitchen floor and basement.
Those are six AA cells and I use nickel metal hydride. With the CBA robot I use the 7.2 volt output directly to the GWS servos which can handle up to eight volts. This bot has four used Parallax CR servos I got from ebay, which are rated for 6 volts, so I will initially use the voltage regulator. But I know that you over volted them with the lithium battery, so if I get brave I may run them off 7.2 like I do my GWS servos.
My challenge of doom video includes prototype number two going over my uneven ground simulation.
[video=youtube_share;4BfwvPFvyPw]
-- Gordon
It should be close to top speed. The TankBot is my Arduino bot and I am using the following to control the speed
The batteries are 4 AA's and a bit on the older side, so that could slow it down a bit. But the sprocket on the TankBot is close to half the radius of the wheels. So it's never going to be as fast.
Anyways, that is a very substantial robot platform, How is the skid steer working out for you Martin?
I think I will try to build one of these after UPEW is over, But who knows what kind of Ideas I will get from UPEW...
Thanks for posting, sorry I was late to the party...:)
-Tommy
I'm glad you liked it. I figured it would be up your alley because there are no casters. So far the skid steering works fine, but I haven't put it through its paces yet. Life (work, taxes, visits to family, scouting, honey do list) will consume most of my spare time until the end of next weekend. When I get a chance I will post a video of it doing stuff.
I send all servos the centering pulse and adjust their trim pot until they are still. At that point there are several options for driving four servo. You can give each one its own control pin which is useful if you want to smooth out the current demand over time. But I just connect pin 12 to both right servos and pin 13 to both left servos. This makes the robot handle like an overgrown Boe-bot which is good for me because I have a ton of programs which will run on it will some tweaking.
Now I need to be able to write my own PC control program using Python. I plan to have some sensor data processed locally and others relayed to the PC. For example the whiskers will override any commands sent from the PC, but other lower priority sensors will get relayed.
-- Gordon
Thanks. It works fine on tile, hardwood, and the dining room table (don't tell my wife). We don't have any linoleum so I can't test that. I haven't tried it on carpet, but can do that tonight. I imagine the increased traction could make turning a challenge, but I'm hoping those tire spikes will provide enough lateral skidding.
That thing zooms around nicely. :thumb:
-Tommy
In that case, time to bring back the Rigel!
-- Gordon