

Propaxxo - Line following Robot

Here i present a Line following robot using a Parallax Propeller mcu (M44D40+) here for link
[video=youtube_share;5V6RkibPg5s]
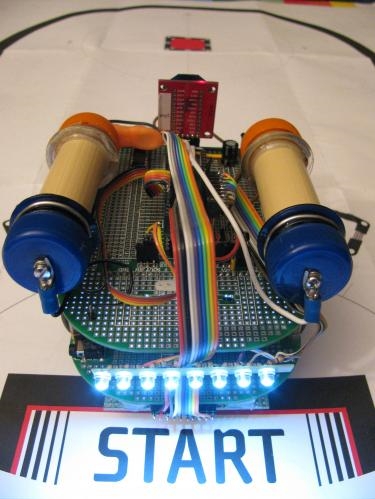
Here you see the WhiteBlue leds acting a visual debug and (to be programmed nerdy kit-kar lights)

As the Propeller has 32 I/O channels available i went for an 8 Bar QRD1114 detect system
Yes overWatt on the 10K resistors due to dwindling supplies (all i have at hand)
It sits 10mm off the floor and is not affected by ambient light.
The castor is a little noisy, however as the wheels and axle are centrally placed ...it spins on the spot ... perfect for line feed.
If you are interested in this base then please contact OddBot(link) as he supplied me this one for Picaxe experimentation (haha he did not realise that its also mega cool for propellers too .... its the only current chassis able to do this)
I am using a RBBB propeller board, however i could have just slotted in a 40pin Propeller chip + crystal + eeprom and achieve the same result....(some tracks have to be modified)

Gareths idea for housing 2 X 3.7Volt Li-ion rechargeable batteries.....
Take a piece of bamboo slightly larger than the batteries and
glue sawn-off 1.5liter bottle ends and tops to the ends with internal spring fix contacts...
and voila neat Star-Trek type engine power up_risers au-natural.
The drive is wicked fast and driven by a L293D motor driver already installed into the robotic chassis base.
I have installed wheel encoders but they are not implemented at moment.

Its a dual purpose robot and has a XBee Pro Rx channel so can be remotely operated.
BTW :- the Tx XBee pro is an Atmel system hacked into an old radio control unit....running at 57KBaud (not possible at 115K as the analog conversion is to slow tsk.tsk atmel)
You can also see right an Orange Polymorph fuse holder - whenever i use Lipos i include a fuse (in this case 1A) just for safety.

System is basically working ..... all i request now is for Propeller Peeps to advise on ways to implement PID control....please?
[video=youtube_share;5V6RkibPg5s]
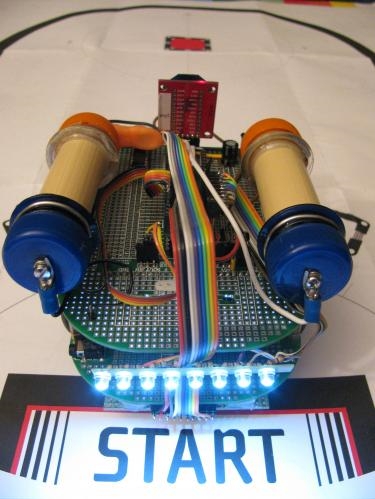
Here you see the WhiteBlue leds acting a visual debug and (to be programmed nerdy kit-kar lights)
As the Propeller has 32 I/O channels available i went for an 8 Bar QRD1114 detect system
Yes overWatt on the 10K resistors due to dwindling supplies (all i have at hand)
It sits 10mm off the floor and is not affected by ambient light.
The castor is a little noisy, however as the wheels and axle are centrally placed ...it spins on the spot ... perfect for line feed.
If you are interested in this base then please contact OddBot(link) as he supplied me this one for Picaxe experimentation (haha he did not realise that its also mega cool for propellers too .... its the only current chassis able to do this)
I am using a RBBB propeller board, however i could have just slotted in a 40pin Propeller chip + crystal + eeprom and achieve the same result....(some tracks have to be modified)
Gareths idea for housing 2 X 3.7Volt Li-ion rechargeable batteries.....
Take a piece of bamboo slightly larger than the batteries and
glue sawn-off 1.5liter bottle ends and tops to the ends with internal spring fix contacts...
and voila neat Star-Trek type engine power up_risers au-natural.
The drive is wicked fast and driven by a L293D motor driver already installed into the robotic chassis base.
I have installed wheel encoders but they are not implemented at moment.
Its a dual purpose robot and has a XBee Pro Rx channel so can be remotely operated.
BTW :- the Tx XBee pro is an Atmel system hacked into an old radio control unit....running at 57KBaud (not possible at 115K as the analog conversion is to slow tsk.tsk atmel)
You can also see right an Orange Polymorph fuse holder - whenever i use Lipos i include a fuse (in this case 1A) just for safety.
System is basically working ..... all i request now is for Propeller Peeps to advise on ways to implement PID control....please?
375 x 499 - 87K