

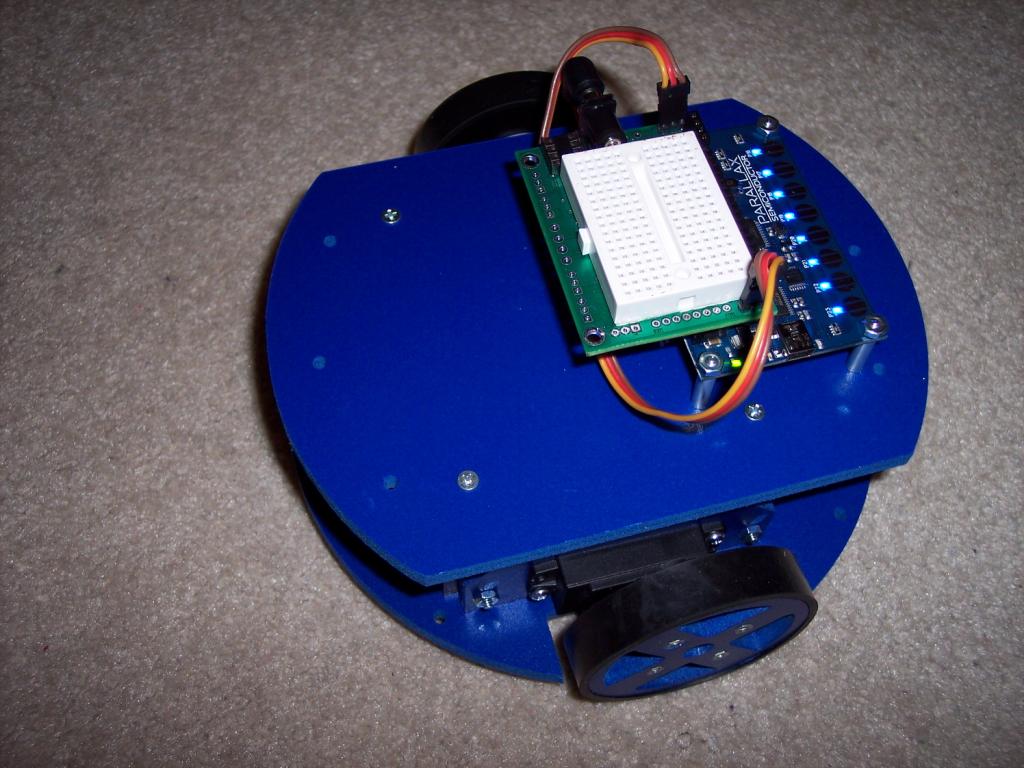
ArdBot chassis with Propeller Quickstart board

Finally got my Ardbot put together and outfitted with a Quickstart board
and our Merlin board to connect the servos.
The Ardbot from budgetrobotics.com is actually a very nice robot chassis.
It's much better than the Magician chassis. But, of course Ardbot costs a bit more.
The Ardbot material is interesting... Some kind of medium density plastic. I really like it.
It's firm enough to be very stable yet pliable enough so that it can survive falls (I think, haven't tested).
Also, it was very easy to drill 4 holes in it to mount the Quickstart.
The blue color is nice too. It's also pretty big, which I like.
I'm experimenting with a couple mods here...
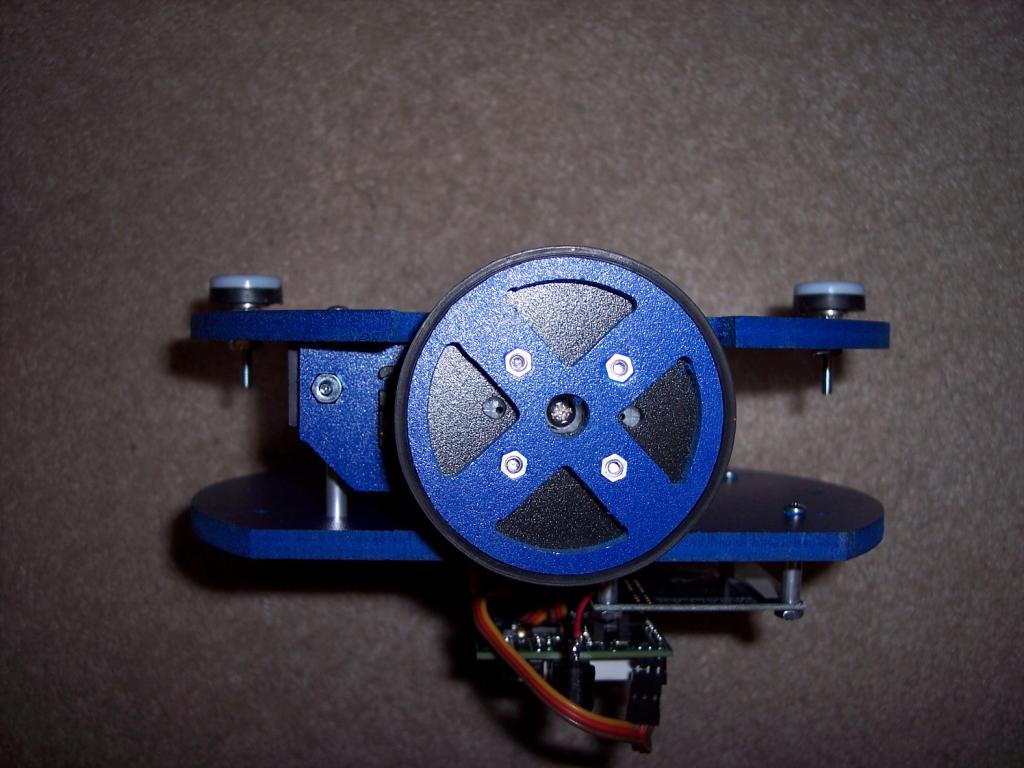
First, the acorn nut sliders that it came with would occasionally get stuck on the carpet.
So, I've replaced them with "Magic Sliders" from the hardware store.
I think it's better now.
Also, I'm trying out a "loboservo" idea. Having Merlin's motor controller directly control
servo motors whose electronics were ripped out.
That is working good too although the power draw is more than anticipated an it needs
a 500uF capacitor installed to keep the Prop power from going too low and rebooting.
It's perhaps much simpler to use the servo headers and regular continous rotation servos...
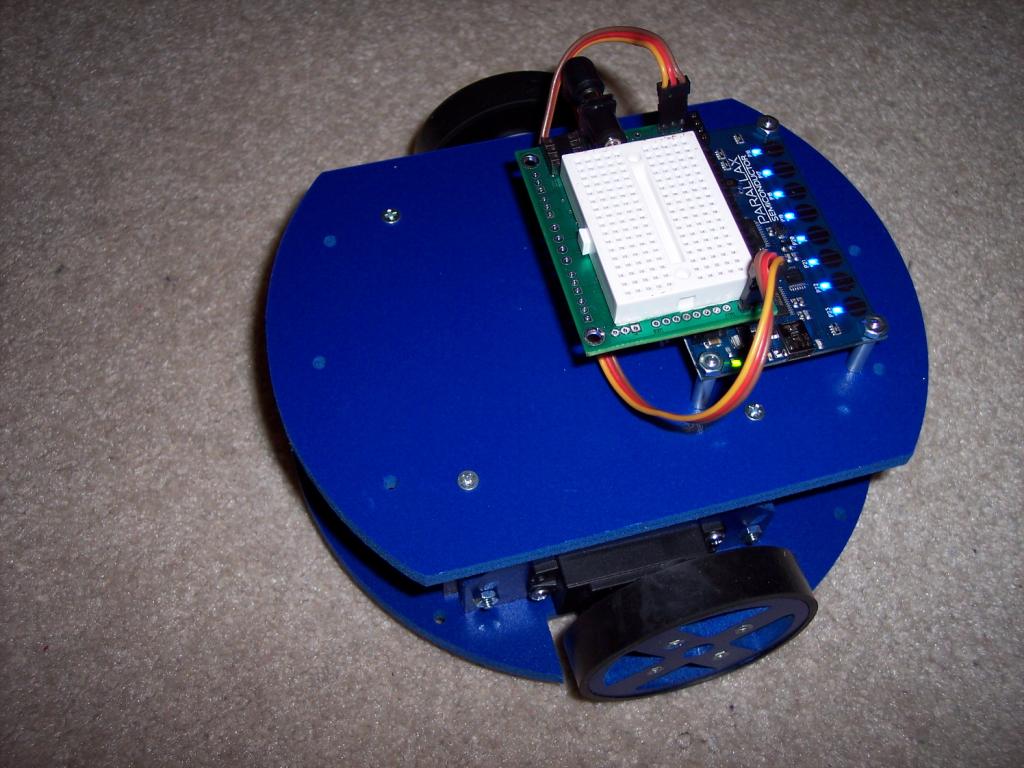
and our Merlin board to connect the servos.
The Ardbot from budgetrobotics.com is actually a very nice robot chassis.
It's much better than the Magician chassis. But, of course Ardbot costs a bit more.
The Ardbot material is interesting... Some kind of medium density plastic. I really like it.
It's firm enough to be very stable yet pliable enough so that it can survive falls (I think, haven't tested).
Also, it was very easy to drill 4 holes in it to mount the Quickstart.
The blue color is nice too. It's also pretty big, which I like.
I'm experimenting with a couple mods here...
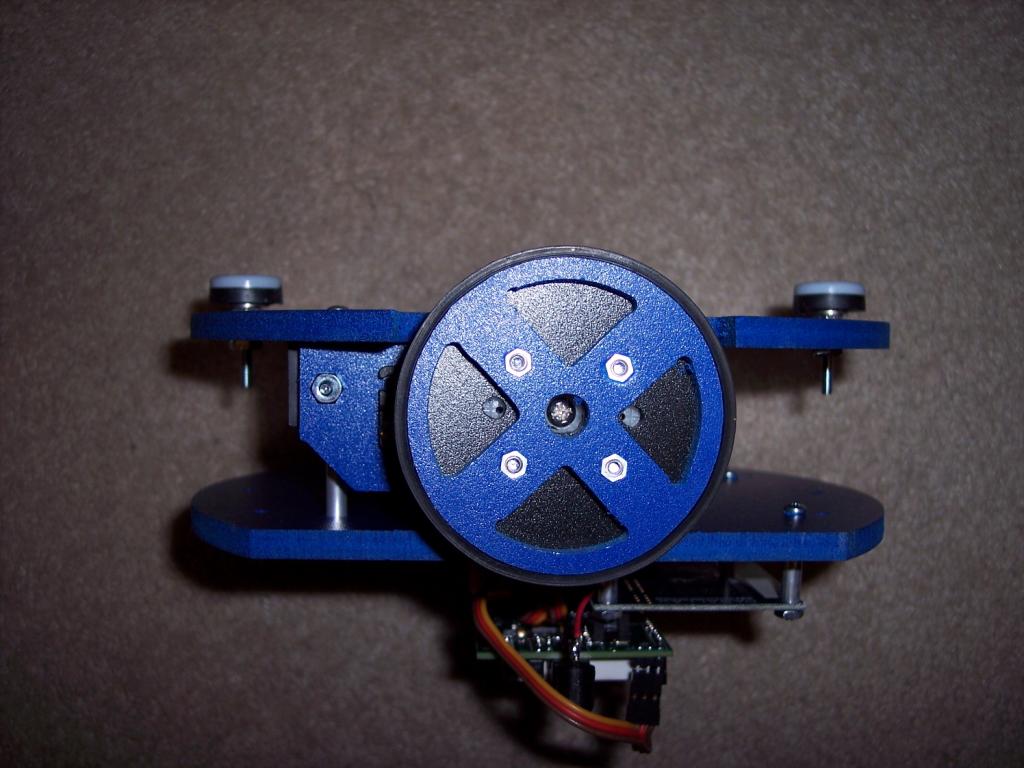
First, the acorn nut sliders that it came with would occasionally get stuck on the carpet.
So, I've replaced them with "Magic Sliders" from the hardware store.
I think it's better now.
Also, I'm trying out a "loboservo" idea. Having Merlin's motor controller directly control
servo motors whose electronics were ripped out.
That is working good too although the power draw is more than anticipated an it needs
a 500uF capacitor installed to keep the Prop power from going too low and rebooting.
It's perhaps much simpler to use the servo headers and regular continous rotation servos...
1024 x 768 - 90K
1024 x 768 - 108K
Comments
It doesn't have an extremely high impact resistance, so avoid dropping it on a hard surface. The most sensitive area is front and back of the wheel wells. The construction of the robot is such that a direct blow to those edges will be minimized, thanks to the wheels.
Bear in mind that the base is invertible, should you want to use a taller caster instead of static skids (drawer pulls, or whatever). Just flip it over.
-- Gordon
I have a feeling Ardbot would do better, but I'm afraid to try it...
My kids will probably do it for me at some point anyway...
I think these "magic sliders" may actually be better than cheap casters...
Need to test on different surfaces to see for sure...
-- Gordon