

2012 The year of the Prop-ASC-Ardumoto-Magibot
 mindrobots
Posts: 6,506
mindrobots
Posts: 6,506
I ACTUALLY got to spend a couple uninterrupted hours on a project today!!!
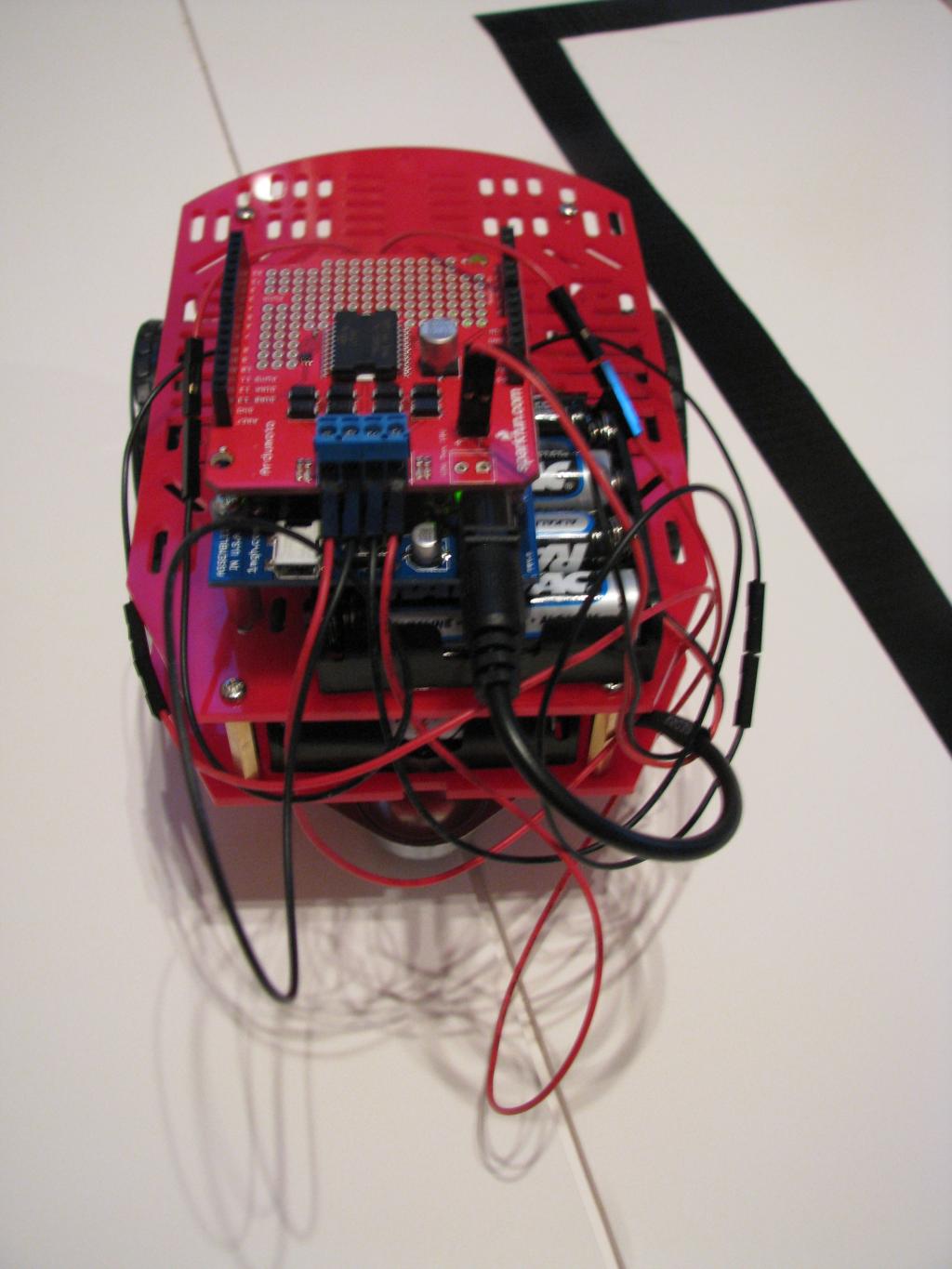
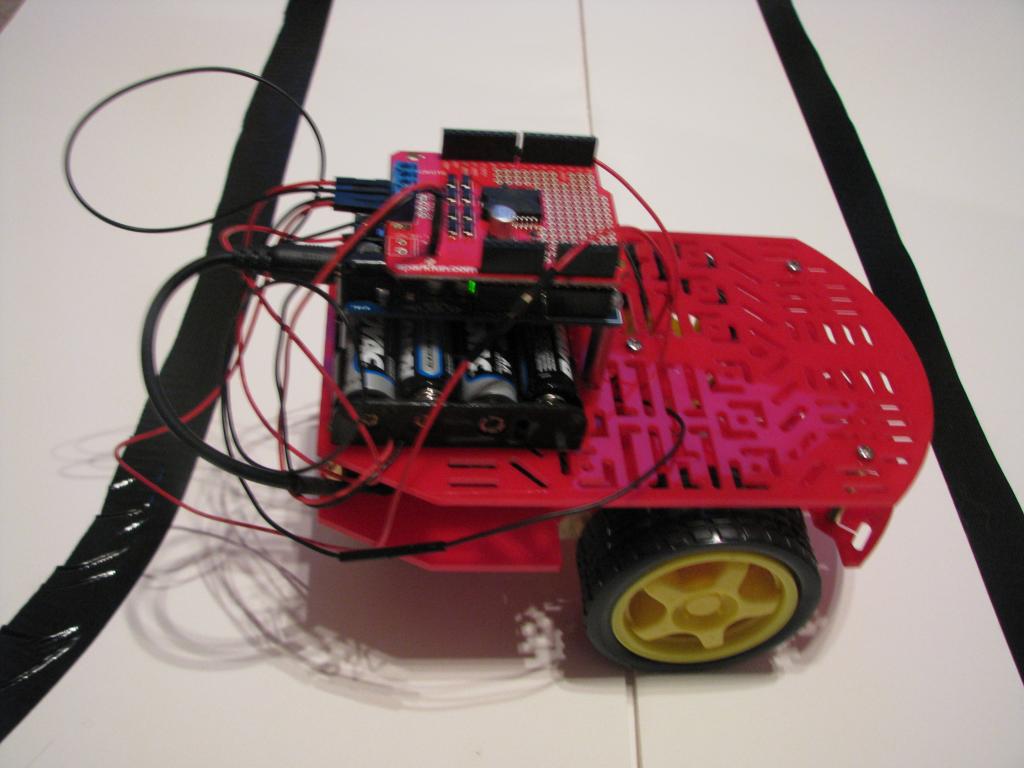
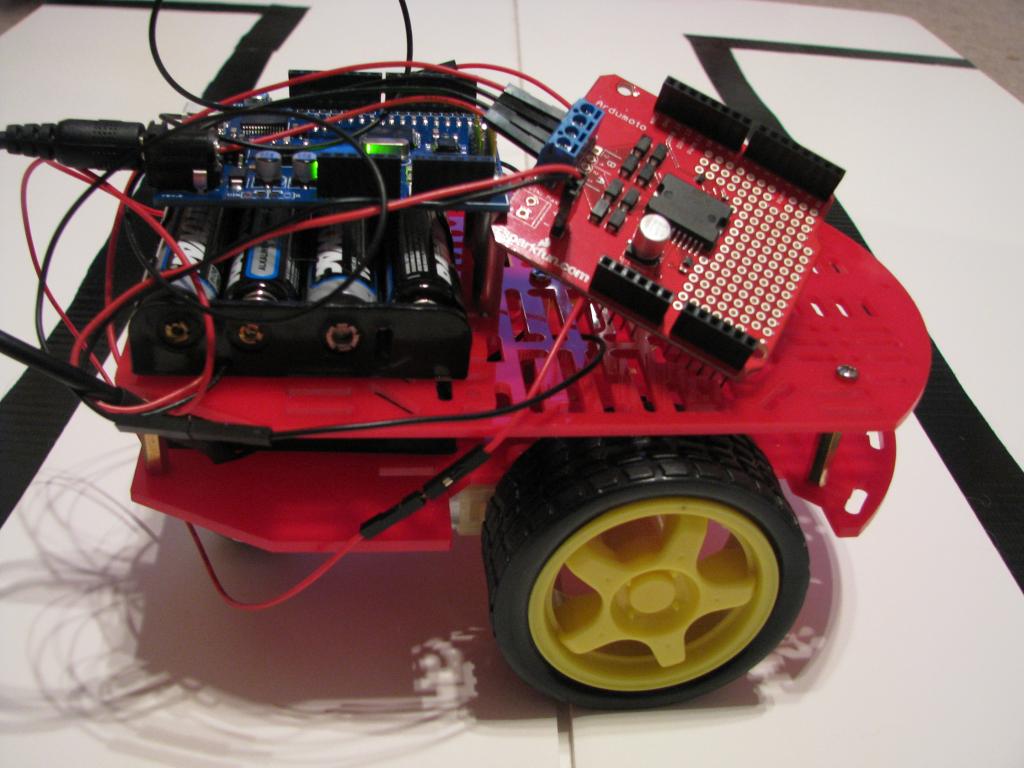
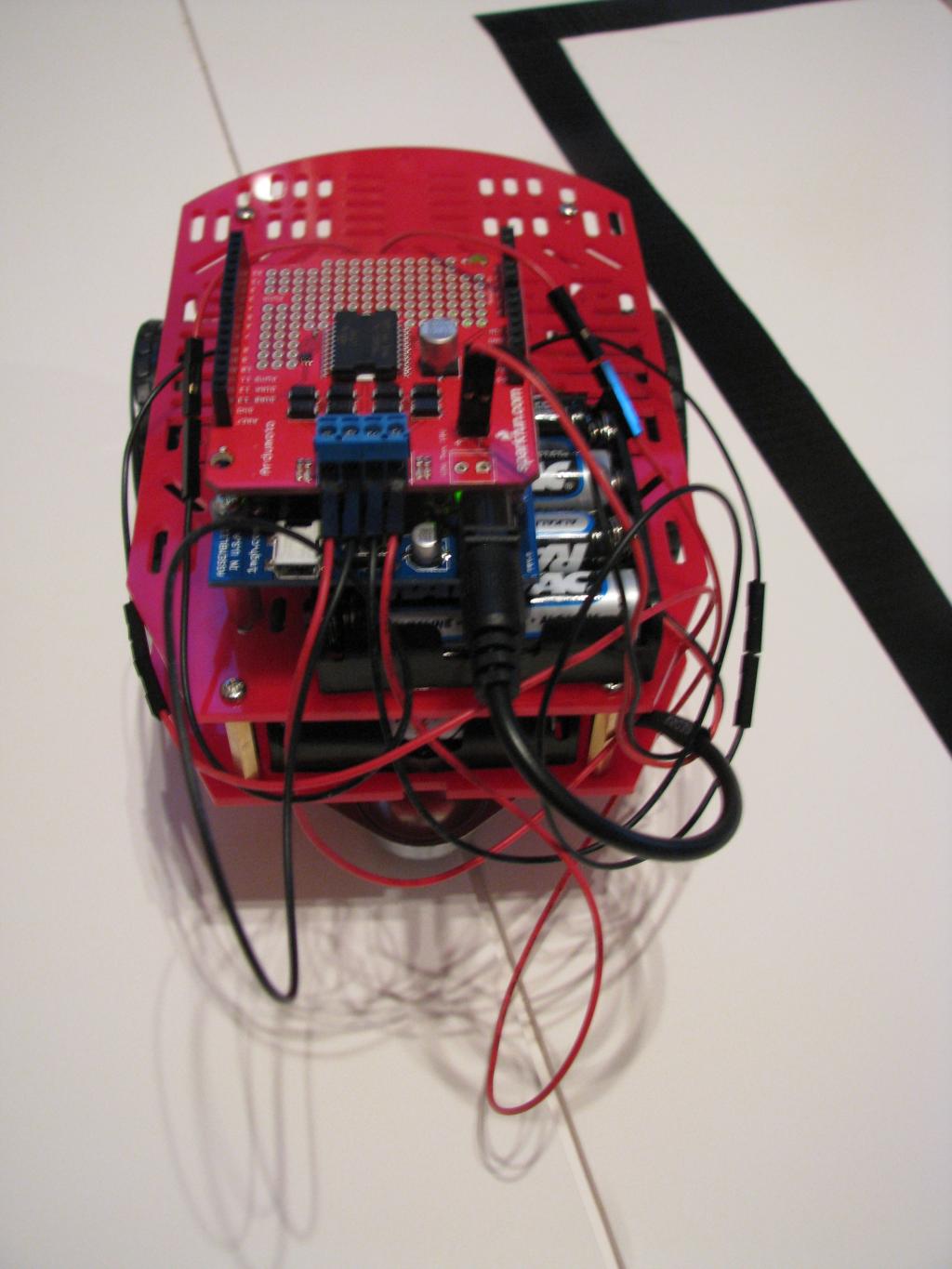
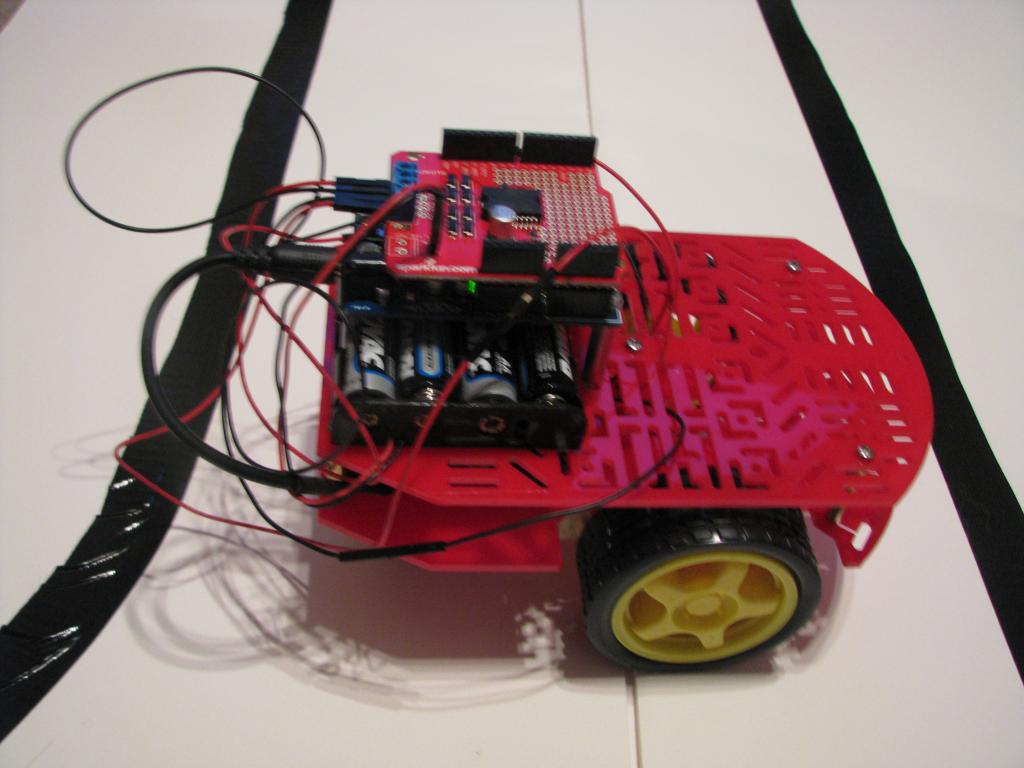
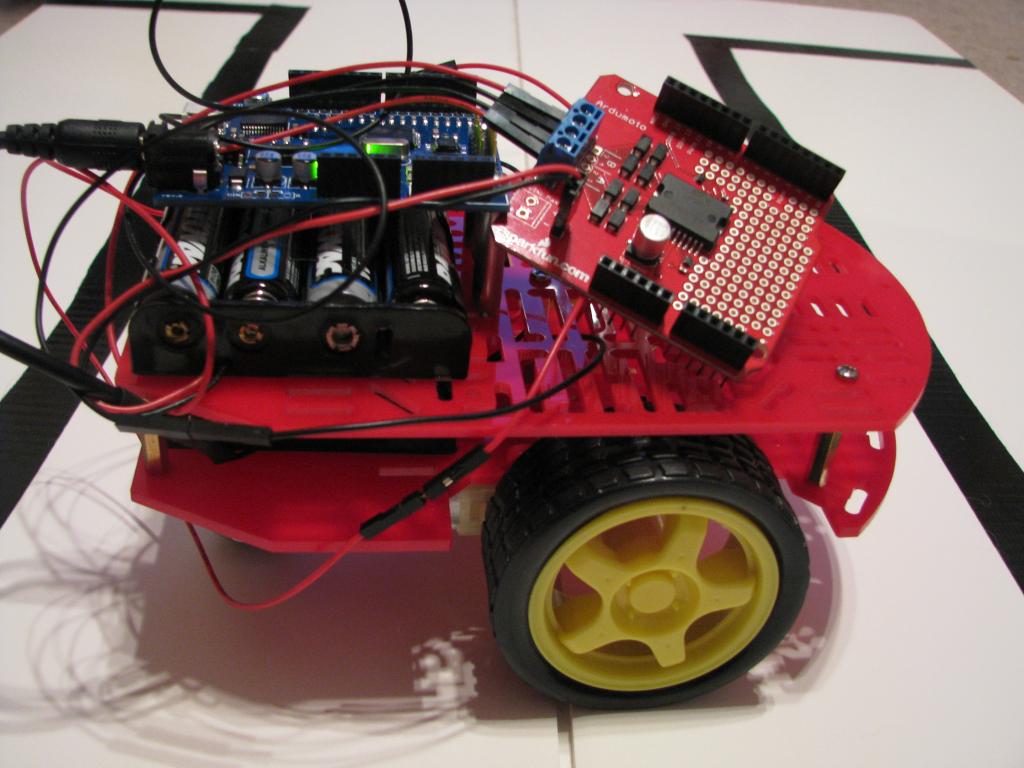
So what did I do??? It's mostly a proof of concept and a test of an Sparkfun Ardumoto shield on Martin Hodge's Propeller ASC from 1mgh.com - it sure ain't pretty but it runs! I piled this all on top of a Sparkfun Magician robot chassis. Once I got everything put together and wired up, it was mostly a matter of grabbing a PWM object from the OBEX (I ended up with Jev Kuznetsov's pwmAsm) changing the pin numbers and setting some speeds and directions.
The Magician motors are far from efficient, and as you can see in the video, far from being a matched pair. The Ardumoto shield uses a L298 as a motor controller but they didn't make the 4 input pins available so you can only select forward and revers the coast and braking functions of the L298 are disabled. The L289 doesn't appear to be the most efficient or best performing motor controller, so between it and the motors, I guess it's not too bad of a robot....except for it veering to the left!!
The Propeller ASC worked like a champ and didn't have any problems interfacing to the Ardumotor shield (way to go Martin! :thumb:). The only "design change" I made from my original plan was to add a second 4xAA battery pack for just the motors. They were making the Prop unstable as I slammed then from full forward to full reverse (go figure!).
I had to make a short video so it would count as a project. With this, I'm 100% more successful with project efforts than I was in 2011!!
I'll probably clean this up a bit and use it for a Propgcc test platform. Propgcc and Arduino shields sound like an interesting combination. The Ardumoto has provisions for a power source but it feeds the VIN pin on the shield connectors. The easiest way I found to separate the power sources was to just bend the VIN pin out of the way on the Ardumoto shield and then plug the boards together. This seemed to work just fine.
[video=youtube_share;6GMCBZ-qlBg]
Thanks for sharing in my victory!! I'm really excited to have actually got something accomplished!!
So what did I do??? It's mostly a proof of concept and a test of an Sparkfun Ardumoto shield on Martin Hodge's Propeller ASC from 1mgh.com - it sure ain't pretty but it runs! I piled this all on top of a Sparkfun Magician robot chassis. Once I got everything put together and wired up, it was mostly a matter of grabbing a PWM object from the OBEX (I ended up with Jev Kuznetsov's pwmAsm) changing the pin numbers and setting some speeds and directions.
The Magician motors are far from efficient, and as you can see in the video, far from being a matched pair. The Ardumoto shield uses a L298 as a motor controller but they didn't make the 4 input pins available so you can only select forward and revers the coast and braking functions of the L298 are disabled. The L289 doesn't appear to be the most efficient or best performing motor controller, so between it and the motors, I guess it's not too bad of a robot....except for it veering to the left!!
The Propeller ASC worked like a champ and didn't have any problems interfacing to the Ardumotor shield (way to go Martin! :thumb:). The only "design change" I made from my original plan was to add a second 4xAA battery pack for just the motors. They were making the Prop unstable as I slammed then from full forward to full reverse (go figure!).
I had to make a short video so it would count as a project. With this, I'm 100% more successful with project efforts than I was in 2011!!
I'll probably clean this up a bit and use it for a Propgcc test platform. Propgcc and Arduino shields sound like an interesting combination. The Ardumoto has provisions for a power source but it feeds the VIN pin on the shield connectors. The easiest way I found to separate the power sources was to just bend the VIN pin out of the way on the Ardumoto shield and then plug the boards together. This seemed to work just fine.
[video=youtube_share;6GMCBZ-qlBg]
Thanks for sharing in my victory!! I'm really excited to have actually got something accomplished!!
Comments
Congrats, that's an amazing achievement for the first week of 2012! Now keep that momentum going...
But it sounds like I can live without the ardumoto, no brake or coast? on that big ol board?.. bah..
Keep up the good fun.:thumb::thumb:
-Tommy
Dumb question: are you sure your motors the same gear ratio?
The Magician is hard to beat for a $15 chassis. Hopefully, my motor issues are just limited to my one kit and not endemic to the breed.
@erco, thanks for the suggestions - I was leading myself toward the same conclusions.
I need to do some more swapping and testing. That severe turn to the left is disturbing.
I have one more Magician kit, so I have two more motors to play with. I assume they are geared the same since they are from a "kit" - but mistakes do happen. The motors did seem to respond differently as I played with the PWM duty cycles. I just need to find more playtime to build the other kit and then play with motor swapping.
The ArduMoto uses an old-school L298, which has a high internal resistance, and at 6V are under-torqued (plus, the L298 is not ideal for that low of a motor voltage). That contributes to the drag problems. If you get a chance, try one of the Pololu drivers based on the Toshiba chip of Freescale chip sets. Parallax is reselling some of these. Not sure which ones offer braking, but the Magician is such a lightweight chassis I'm not sure it would really mean anything.
I think you'll find that at slower speeds through PWM the robot will turn on its own even more readily. You might try taking some of the weight off the ball caster. I found that when the ball caster had all the battery weight over it the robot would careen off into some worm hole when it traveled in one direction (I can't remember if the effect was worse going forward or backward).
Finally, check that the hub of the wheel isn't rubbing against the side of the chassis. That can cause a drag and slow down that side.
-- Gordon
It's not one of SparkFun's better thought-out boards. It uses pin 3 (one of TWO hardware interrupts on the Uno), plus pin 13 (built-in LED) for two of its four control pins. Both are very near the top of the "don't use these unless you ABSOLUTELY MUST) list. Pin 13 is never a good pin to use for motor control, as the LED is made to flash during bootload.
-- Gordon
Now I can see where I'll need to keep one magician as a stock item and then start playing "Pimp My Magician" with the other one. It sounds like #2 will end up as two red acrylic plates with a lot of foreign objects connected to it.
This went from being a simple test bed for propgcc robots with Martin's Propeller ASC with the Ardumoto to an on going robotic evolution.
Just to warn you guys, yesterday, I bought a sheet of plywood!
As many tall buildings skip the 13th floor entirely, perhaps deleting pin 13 on ICs would be a step in the right direction.
And there was much rejoicing.
Yay.
I had the same thought about eliminating Pin13 on all IC chips... No sense in taking any chances with luck...:blank:
-Tommy
"whatcha doin' with it?"
to steal dialogue from Bill Murray in Stripes:
"Robots, SIR!"
"What kind of robots, soldier?"
"Plyyyywood Robots, SIR!"
I need to check and work out dimensions but I was hoping to come up with a plywood platform similar to the 4-H Robot being discussed in another thread. If I measure carefully and lay things out right, I hope with 3 saw cuts and a few holes, I can turn each sheet into 2 chassis. It works out to like $1.80 per chassis if the parts fit.
...but I don't want to say any more here, that would be like hijacking my own thread!