

ZappBot 3 - Tracked Humanoid Torso Robot

ZappBot 3 - Tracked Humanoid Torso Robot
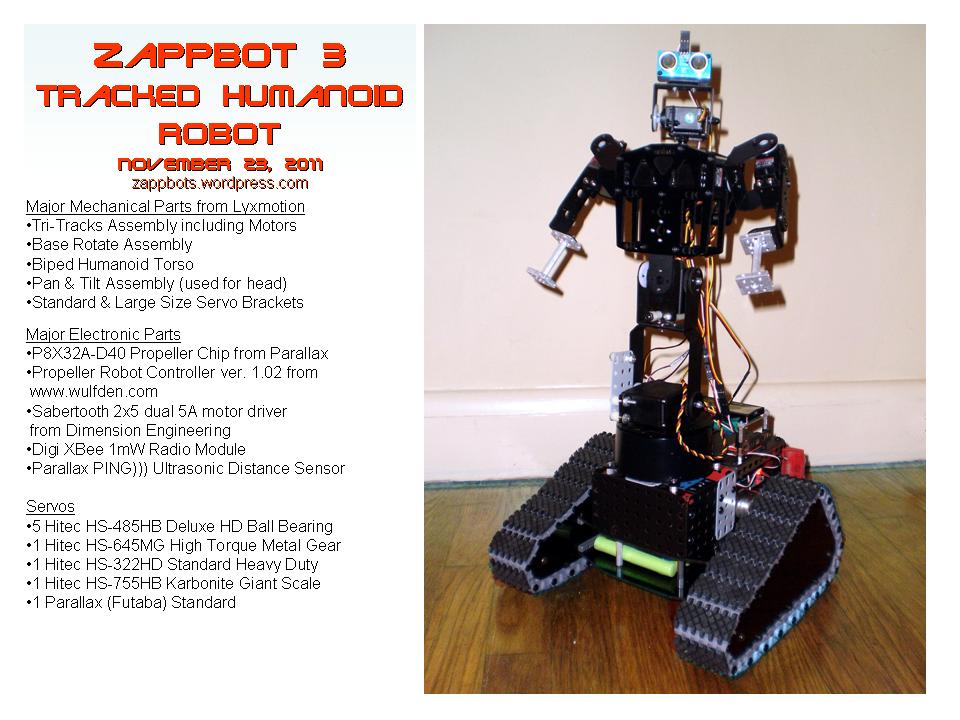
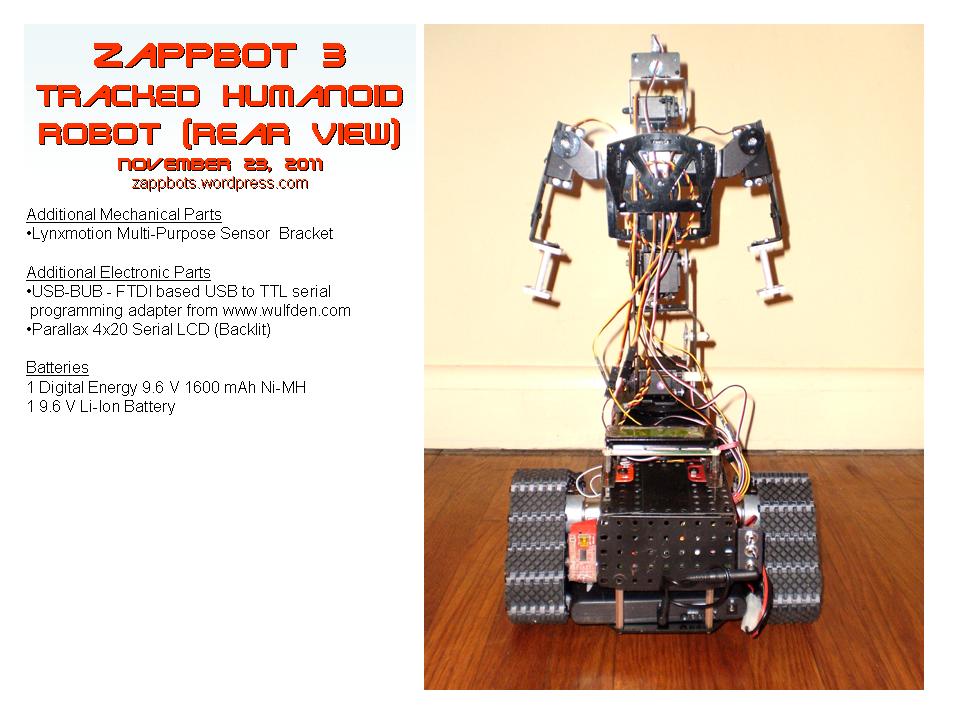
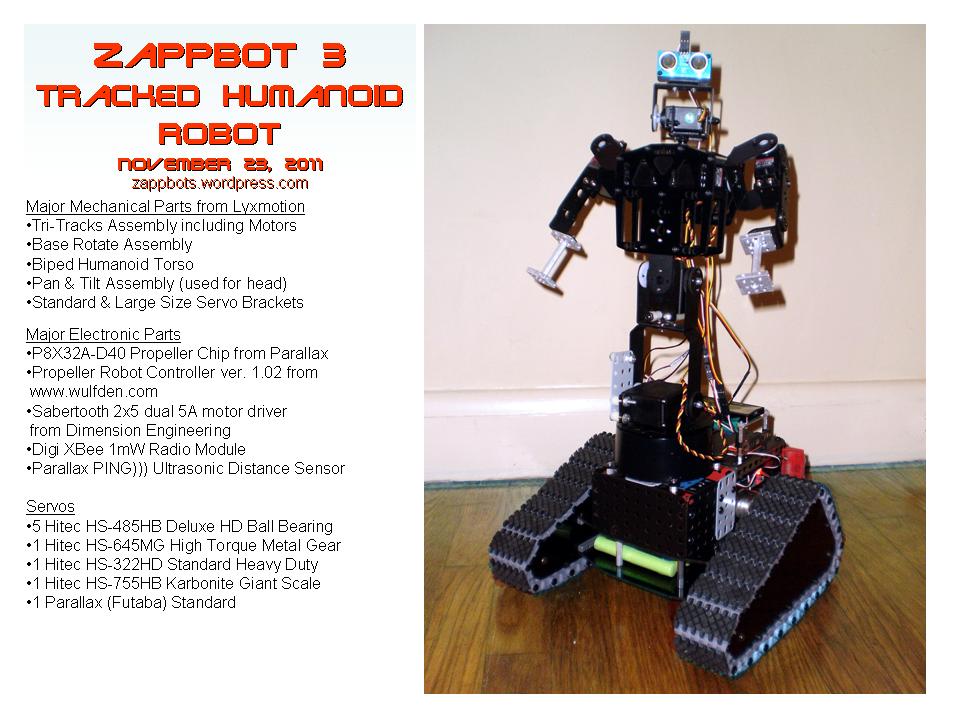
The robot is 11" Wide, 12" Deep and 21" Tall.
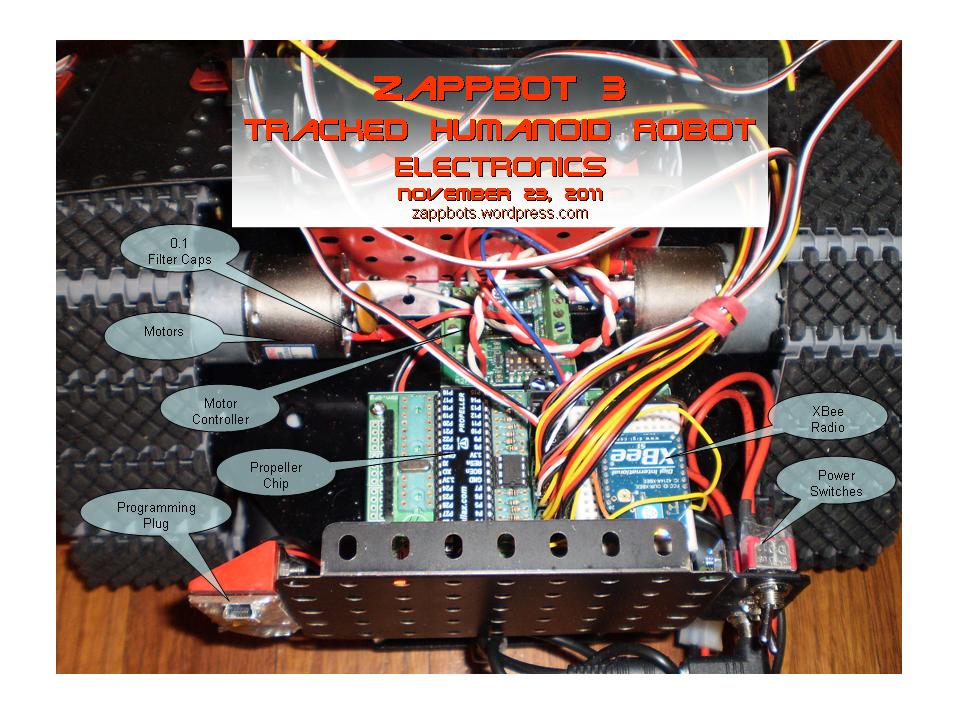
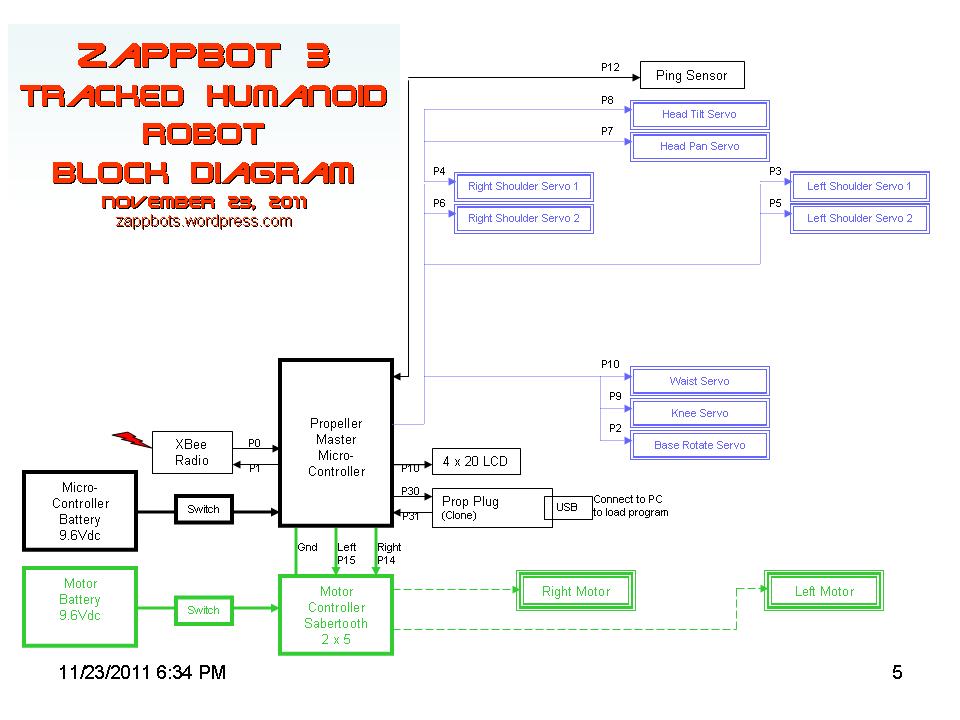
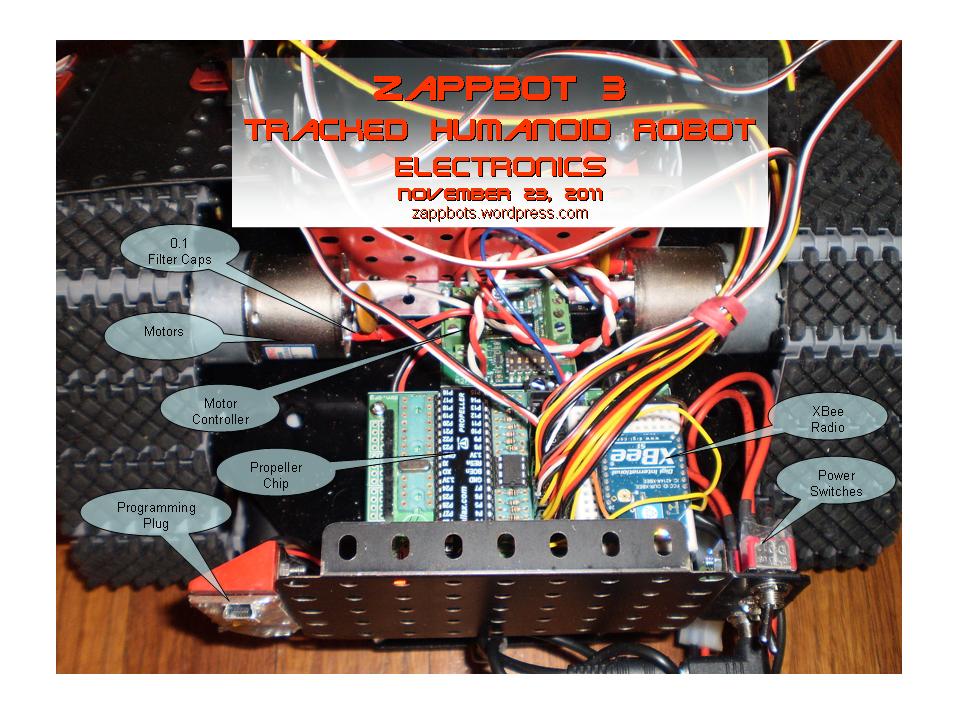
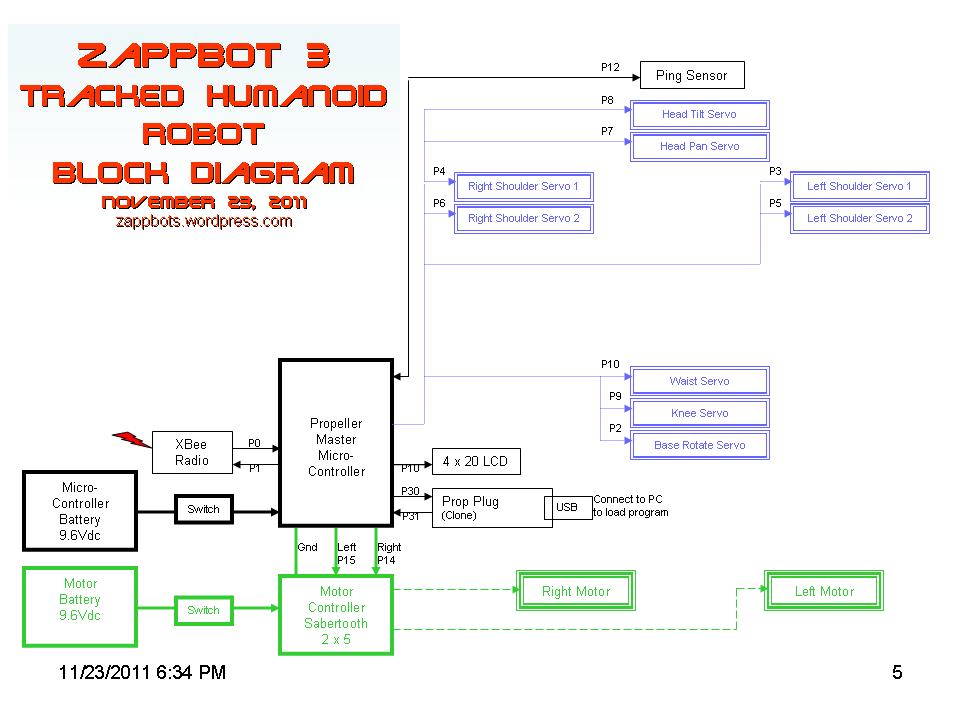
It is controlled by a Propeller Chip P8X32A-D40 and a Digi XBee 1 mW Radio Module.
It's November 29, 2011 and I have been collecting parts for this Robot for about a year and started the build about November 1, 2011.
Pictures, Description, Part List and Block Diagram are shown in the slides below:
I can type commands on my PC keyboard to remote control the robot via a radio link.
The robot is programmed in Spin code.
At the present time I can send the following commands to the robot:
The robot is 11" Wide, 12" Deep and 21" Tall.
It is controlled by a Propeller Chip P8X32A-D40 and a Digi XBee 1 mW Radio Module.
It's November 29, 2011 and I have been collecting parts for this Robot for about a year and started the build about November 1, 2011.
Pictures, Description, Part List and Block Diagram are shown in the slides below:
I can type commands on my PC keyboard to remote control the robot via a radio link.
The robot is programmed in Spin code.
At the present time I can send the following commands to the robot:
- Move the Entire Robot
- Forward, Backward, Rotate Clockwise, Rotate Counter-clockwise, Stop
- Rotate the Torso
- Left, Right, Center
- Control the Head Movement
- Pan Left, Pan Right, Pan Center
- Tilt Up, Tilt Down, Tilt Level
- Control the Left Arm
- Left Shoulder Axis 1
- Swing Up, Swing Down, Swing Forward
- Left Shoulder Axis 2
- Swing Up, Swing Down, Swing Out
- Left Shoulder Axis 1
- Control the Right Arm
- Right Shoulder Axis 1
- Swing Up, Swing Down, Swing Forward
- Right Shoulder Axis 2
- Swing Up, Swing Down, Swing Out
- Right Shoulder Axis 1
- LCD Back light
- Turn On, Turn Off
960 x 720 - 111K
960 x 720 - 93K
960 x 720 - 108K
960 x 720 - 127K
960 x 720 - 81K
Comments
[video=youtube_share;FX61HnRHRu8]