

Pontus Rover (from the builder)
 nvale55@gmail.com
Posts: 15
nvale55@gmail.com
Posts: 15
Hi,
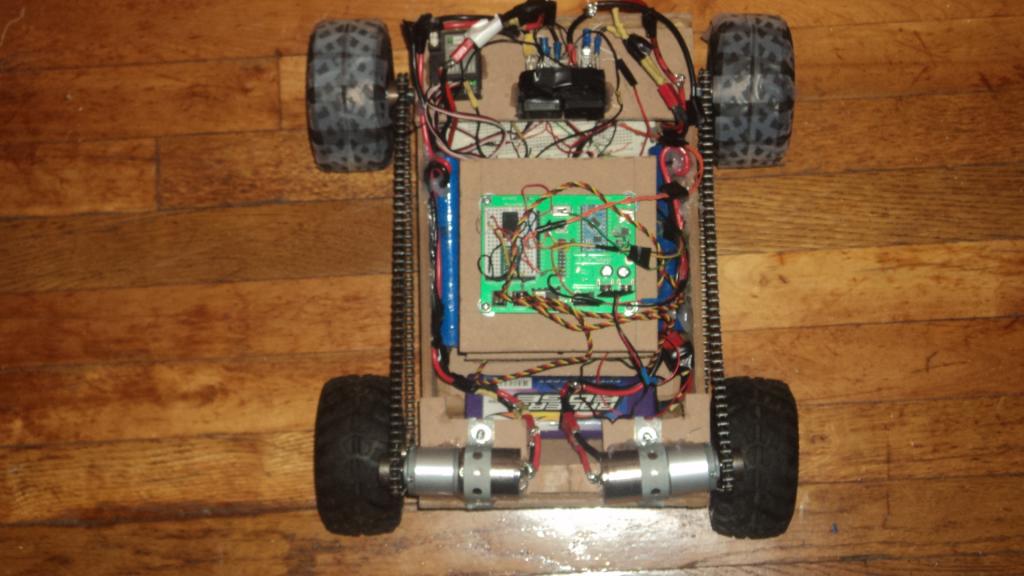
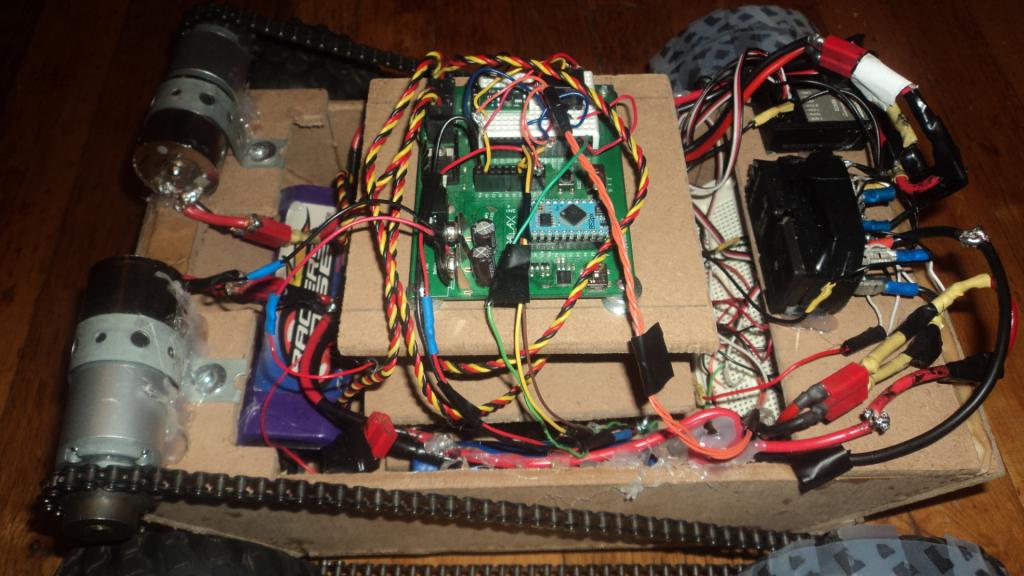
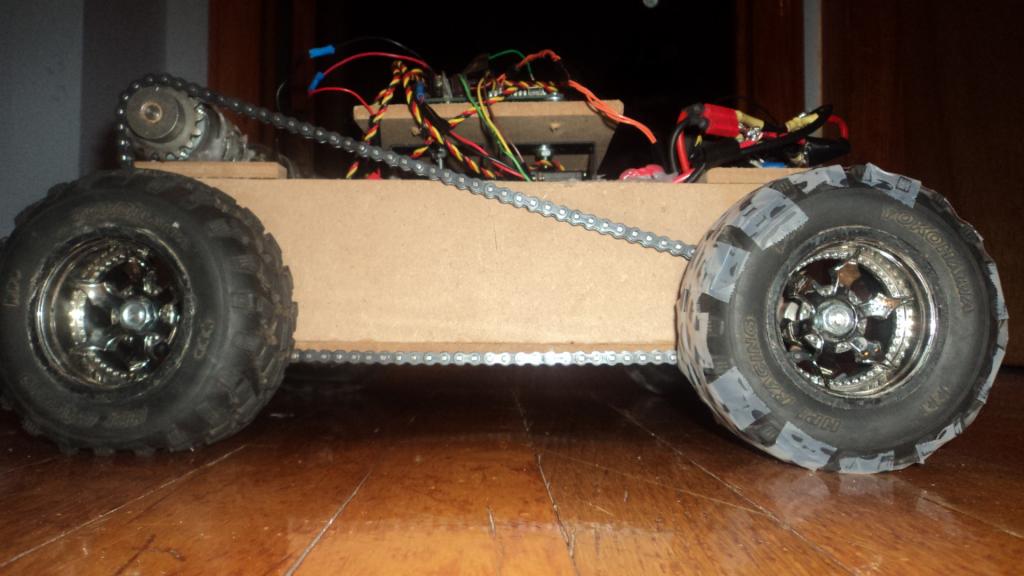
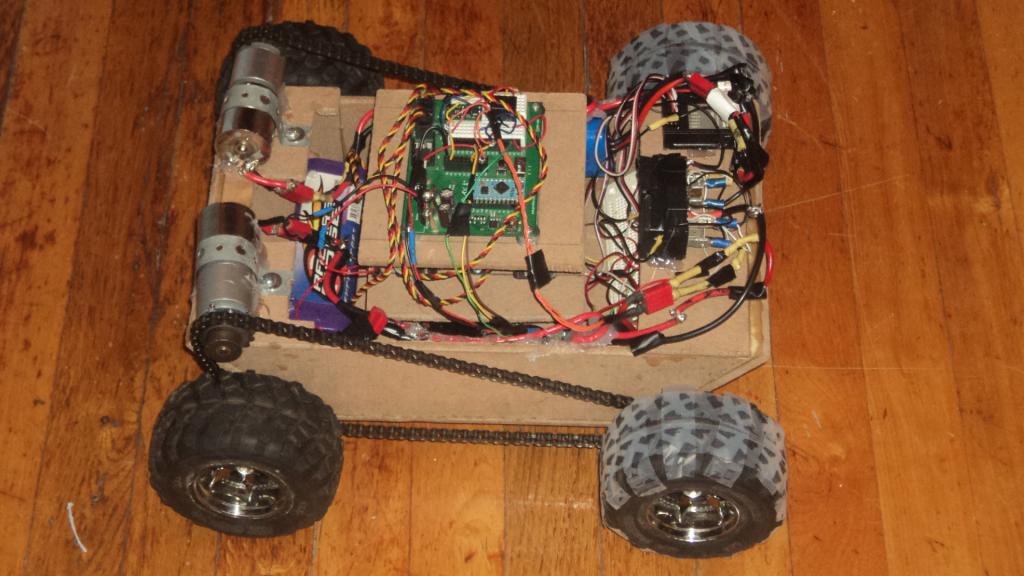
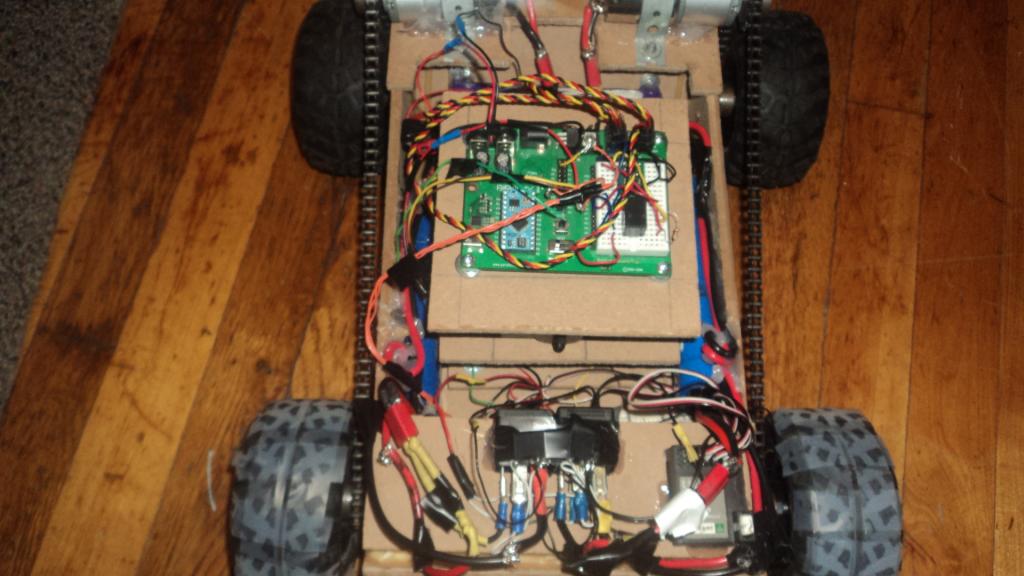
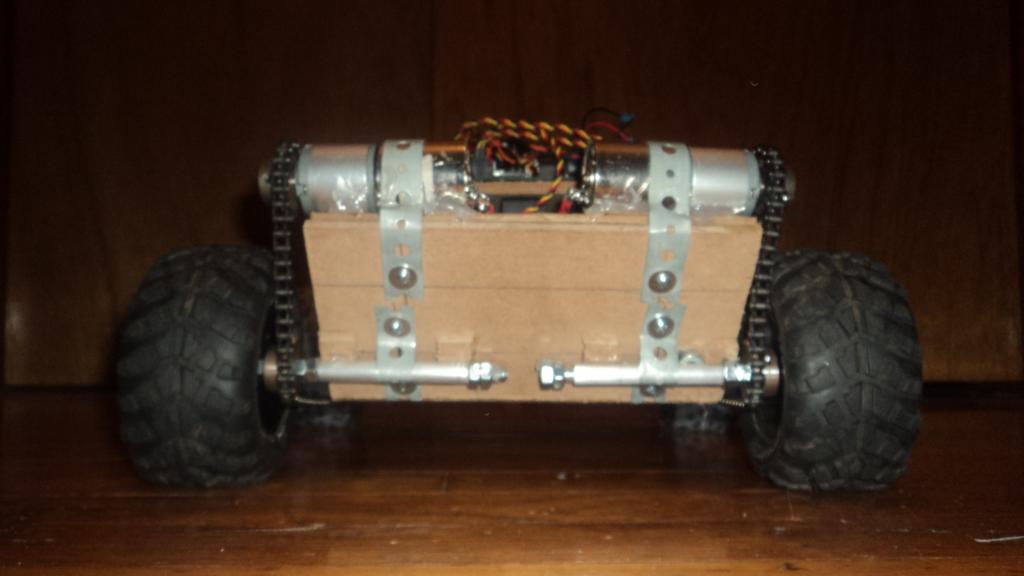
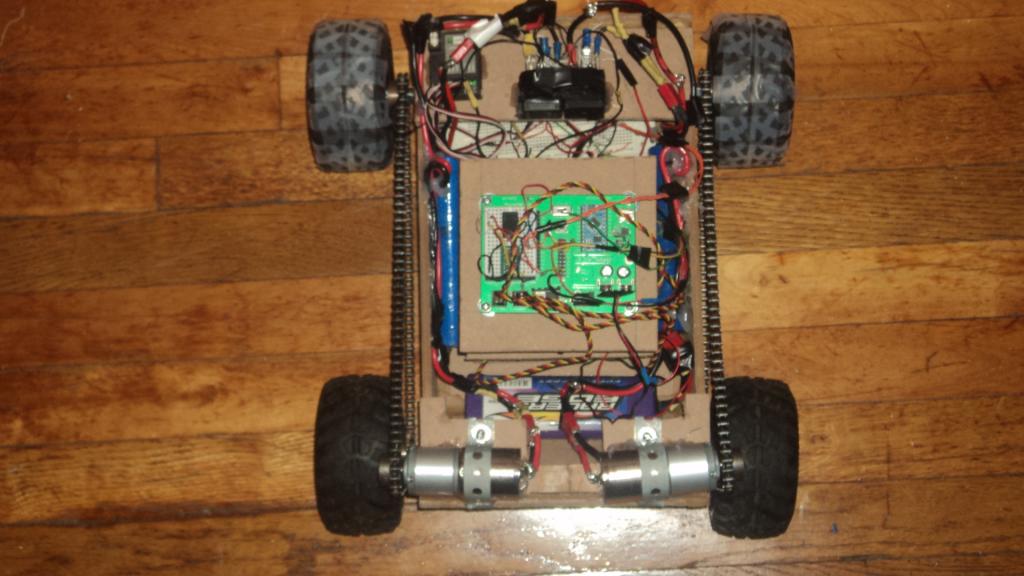
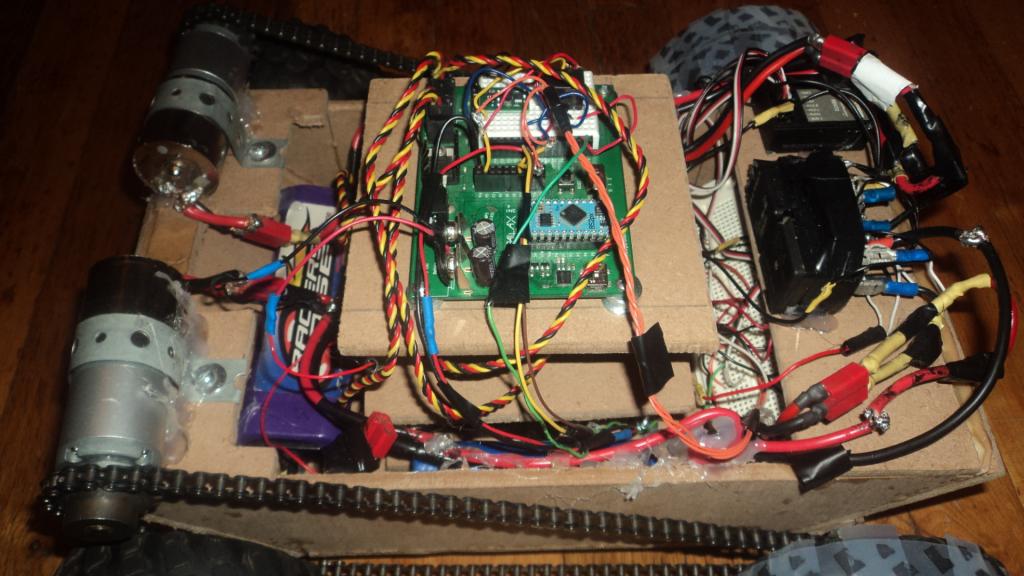
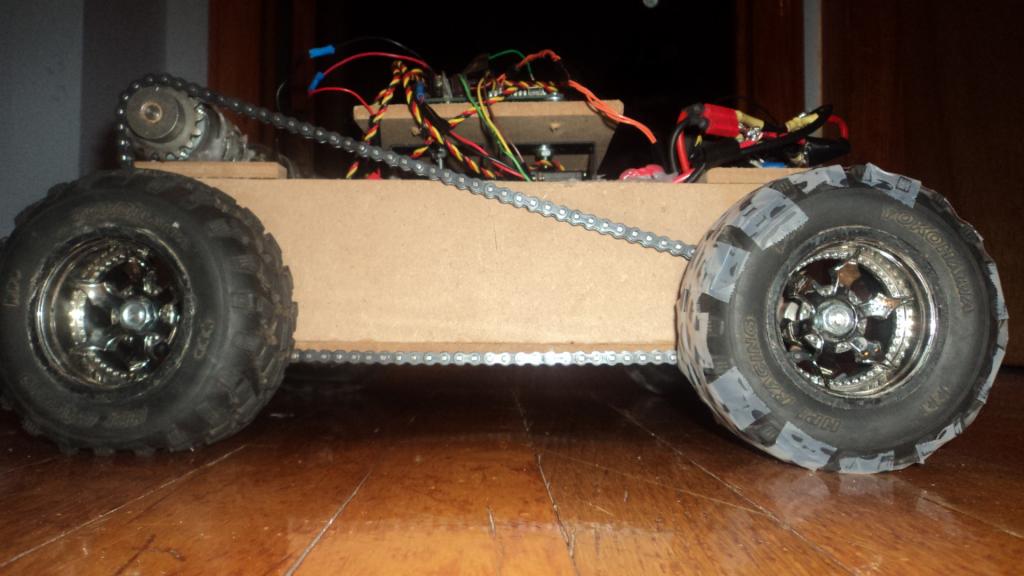
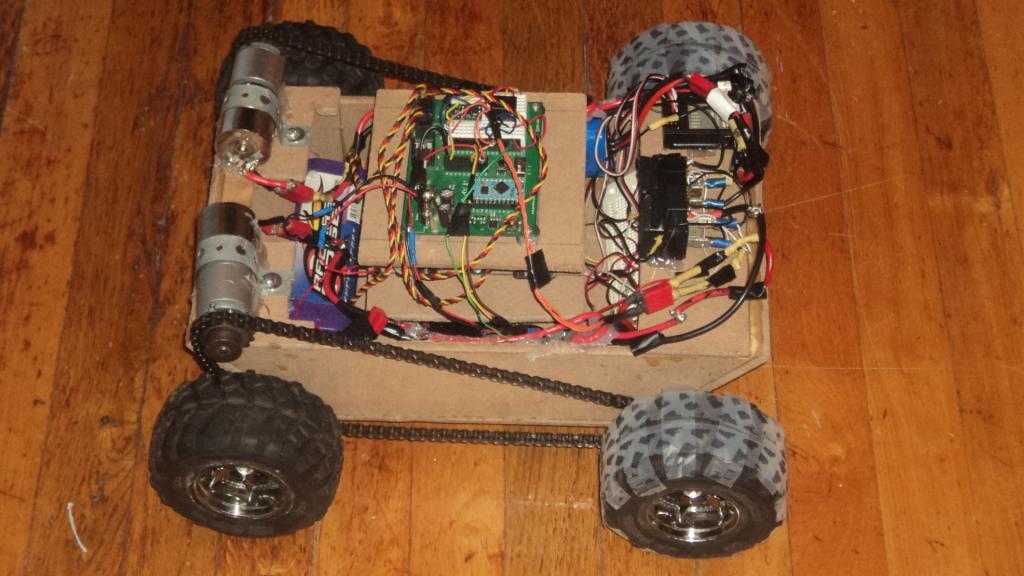
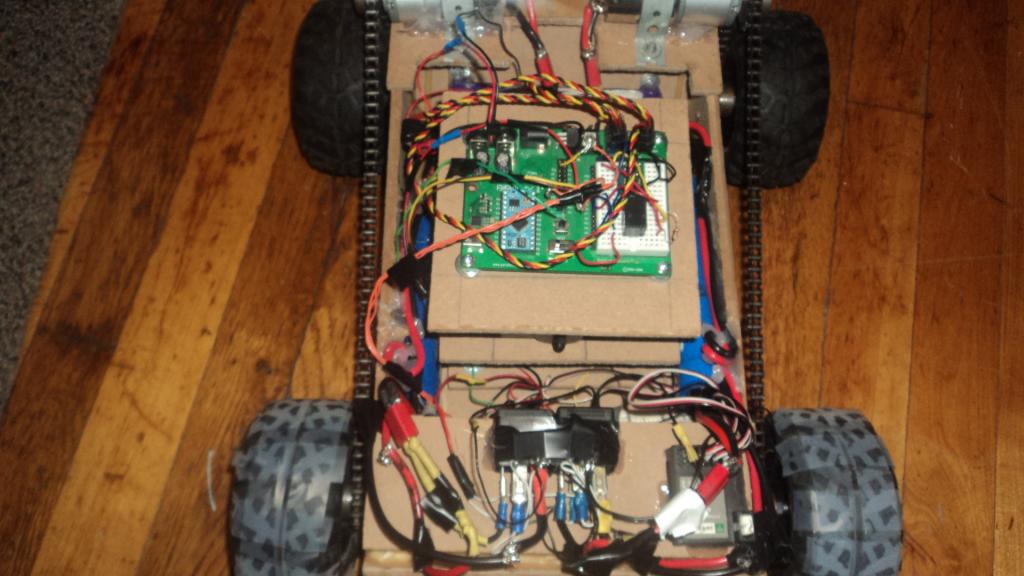
I was going through my views on my video on youtube called Pontus Rover and noticed some of them came from these forums, so i decided what the heck i'll joing and give and explanation of my project. To start, this project was my high school senior project and the idea was to build a platform that would be able to go on all - terrain while still staying level. To do this i made a simple rover platform that used tank steering to steer and a remote control to control the BS2px which controled the motors. Once the platform was built, i decided to a tilt mechanism which involved, 4 servos (two for the x-axis and two for the y-axis), which were also connected to the same BS2px, along with an accelerometer which sensed when the platform was in an angle (i would have prefered to use a gyroscope, but the accelerometer was cheaper and i was on a budget). This video basically shows that the rover is able to go up and down the ramp while the tilt mechanism says relativaly level (i say relatively because as you could see it jitters when moving and turning). My next project will hopefully include a propeller chip instead of the BS2px which in my mind means my robot could do more things.
Here's the video of my rover:
http://www.youtube.com/watch?v=tQ7wDD8r2KA
and here are some pictures
![project_pnus_rover_2_pits_001[1].jpg](https://forums.parallax.com/uploads/attachments/60839/85072.jpg)
I was going through my views on my video on youtube called Pontus Rover and noticed some of them came from these forums, so i decided what the heck i'll joing and give and explanation of my project. To start, this project was my high school senior project and the idea was to build a platform that would be able to go on all - terrain while still staying level. To do this i made a simple rover platform that used tank steering to steer and a remote control to control the BS2px which controled the motors. Once the platform was built, i decided to a tilt mechanism which involved, 4 servos (two for the x-axis and two for the y-axis), which were also connected to the same BS2px, along with an accelerometer which sensed when the platform was in an angle (i would have prefered to use a gyroscope, but the accelerometer was cheaper and i was on a budget). This video basically shows that the rover is able to go up and down the ramp while the tilt mechanism says relativaly level (i say relatively because as you could see it jitters when moving and turning). My next project will hopefully include a propeller chip instead of the BS2px which in my mind means my robot could do more things.
Here's the video of my rover:
http://www.youtube.com/watch?v=tQ7wDD8r2KA
and here are some pictures
1024 x 576 - 42K
1024 x 576 - 78K
1024 x 576 - 95K
1024 x 576 - 71K
1024 x 576 - 86K
1024 x 576 - 80K
Comments
That Robot is just cool in every way.:thumb::thumb: Thanks for sharing.
You will have lots of fun with a Propeller, It's like having 8 stamps at once.
-Tommy
Thank you for appreciating my robot
-Nik
Welcome to Parallax's Forum.
I also like your robot. Very cool.
The Propeller is a great uC to use with robots.
Do you have a Propeller board/chip yet? Have you downloaded the Propeller Tool?
Parallel processing is so cool. No more trying to check sensors and drive motors between pulses to the servos. With the Prop, you just do it all at the same time.
And please, keep posting your progress here. We all love seeing others' robots.
Duane
Sorry i wasn't able to respond right away, thank you also for appreciating my robot. My propeller platform from gadget ganster came in yesterday, so it shouldn't be long before i have some sort of robot together. I have yet to download to Propeller Tool yet, but i hope to do that some time today. The parallel processing is the main reason for the purchase of this uC, like you said, you can check sensors while driving motors all at the same time.
Nik