

Freja the cute little mini bot...

Howdy...
I got frustrated with my main bot and decided I need to start smaller. ;-)
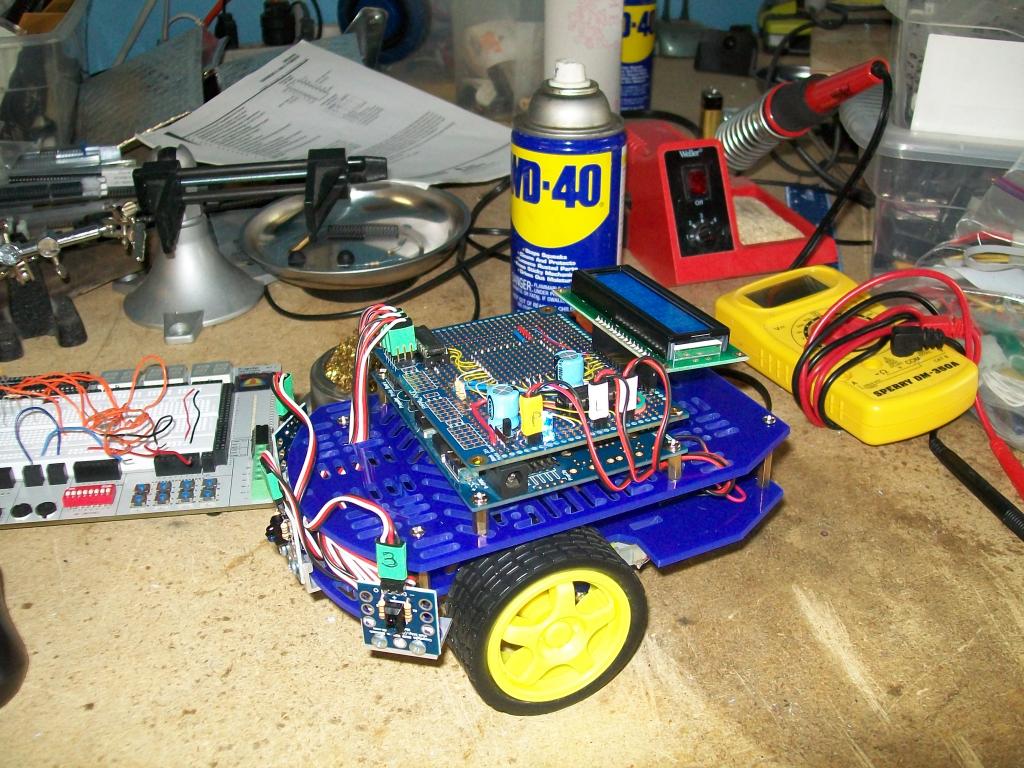
Meet Freja, the cute little minibot.
She is made up of the Magicians Chassis which I bought from Bill Henning.
Her brain is a Propeller Protoboard with a blank 3x4 protoboard mounted on top.
I added three SirMorphs for distance/collision detection which are read by a MCP3008 ADC chip.
Her motors are controlled by a SN754410 configured as two H-bridges.
To display information, she has a 2x16 LCD mounted which currently displays the distance from the three SirMorphs and also the battery voltage.
More info to come, hopefully I can get some more time to play with her tonight...
Frejas maiden voyage... ;-)
http://www.youtube.com/watch?v=QUxiNY5-vPI
Speed control,
http://www.youtube.com/watch?v=ctvrRTL1-Yc
Still got a few issues to look into, it got stuck on my Crocs, the IR got absorbed or something since I didn't get a reading. Might need a backup limit switch.
I got frustrated with my main bot and decided I need to start smaller. ;-)
Meet Freja, the cute little minibot.
She is made up of the Magicians Chassis which I bought from Bill Henning.
Her brain is a Propeller Protoboard with a blank 3x4 protoboard mounted on top.
I added three SirMorphs for distance/collision detection which are read by a MCP3008 ADC chip.
Her motors are controlled by a SN754410 configured as two H-bridges.
To display information, she has a 2x16 LCD mounted which currently displays the distance from the three SirMorphs and also the battery voltage.
More info to come, hopefully I can get some more time to play with her tonight...
Frejas maiden voyage... ;-)
http://www.youtube.com/watch?v=QUxiNY5-vPI
Speed control,
http://www.youtube.com/watch?v=ctvrRTL1-Yc
Still got a few issues to look into, it got stuck on my Crocs, the IR got absorbed or something since I didn't get a reading. Might need a backup limit switch.

1024 x 768 - 172K
1024 x 768 - 160K

1024 x 768 - 166K
Comments
Wheel encoder...
Remote Control...
Whatcha gonna use for the remote control stuff?
oh, and you gotta have video, or it never happened..
-Tommy
The trick with wheel encoding will be mounting the sensors; I did check, it is possible :-)
@Bill, I have two more SirMorphs I could use for wheel encoders but I'm also looking into salvaging parts from an old PC mouse.
Lesson learned today, cheap batteries might be good for remote controls and your average electronic toys but they don't measure up for Freja.
She is suffering multiple brown outs and resets after only 7-10 minutes with the cheapo batteries.
I'm switching out the supplied 3 battery holder with a 4 battery holder and plan to use re-chargeable batteries in stead.
More to come tomorrow...
I switched to 4 rechargeable 2450 mAh batteries... ;-)
Got to check the longevity though but hopefully this will work a lot better.
@ Ttailspin, I added a video at the top...
Schematics and basic roaming code added to the top of the thread.
Clean and tidy schematics, Snappy video, working code... Yup, its got all the makings..:thumb:
-Tommy
Next up is a mechanical bumper since the IR can be absorbed on certain materials.
I also need PWM for speed control and wheel encoder to get her to go in a straight line and turn specific degrees etc.
I hope to get some time this weekend to work on it.
If you look closely, you can see that she has three different speeds, one forward, one backward and one turning.
http://www.youtube.com/watch?v=ctvrRTL1-Yc
For true speed control I need feedback with wheel encoders so that will be implemented later.
This is a good start though...
Code attached at top of thread.