

Casters end

I had held off building for a while. As I was not sure it would work at all,
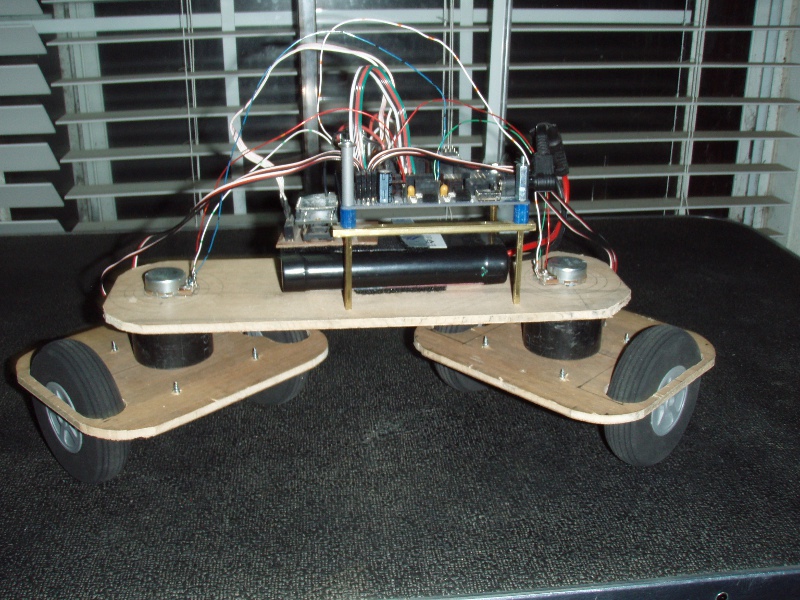
Glad I finally started this build, This thing is a kick to drive around.
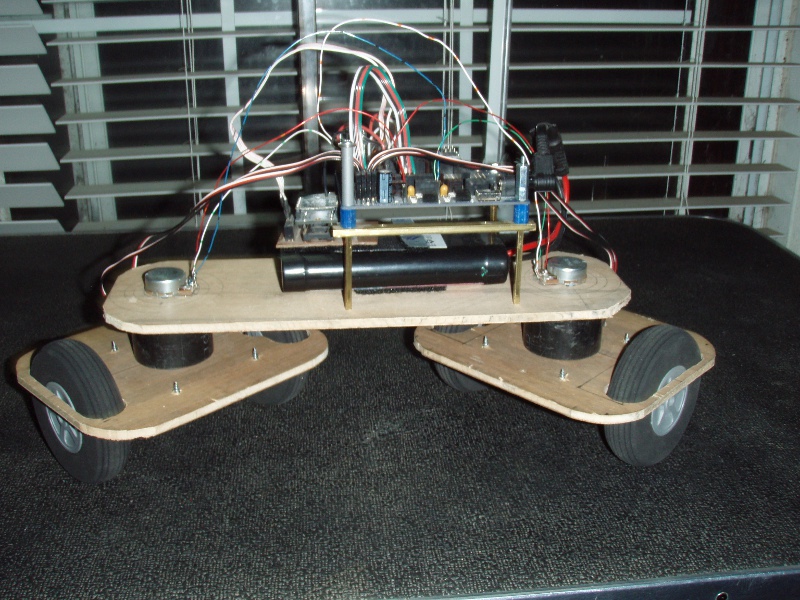
The 10K pots on each end only allow for about 250 degrees of steering, but thats ok, It would have been
extra expense because of the special wire management issues involved with 360 degrees of steering rotation...
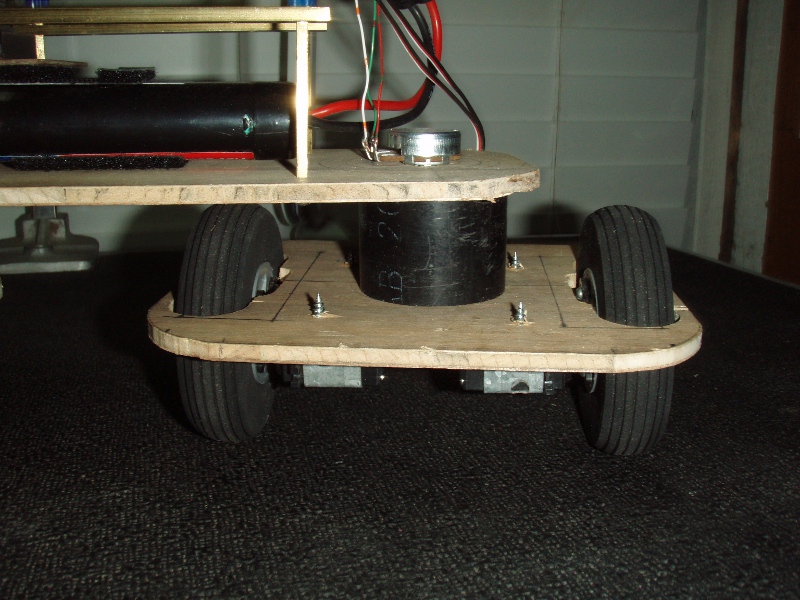
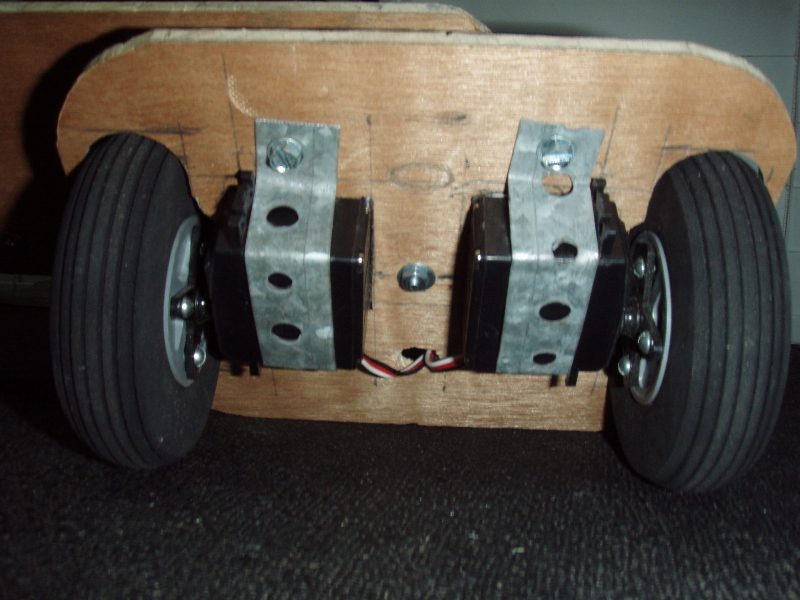
The exact length of pipe and the pot shaft was dictated by tire clearance under the frame.
The "axle" is 1 1/2" ABS pipe, cut to the same length as the protruding shaft.
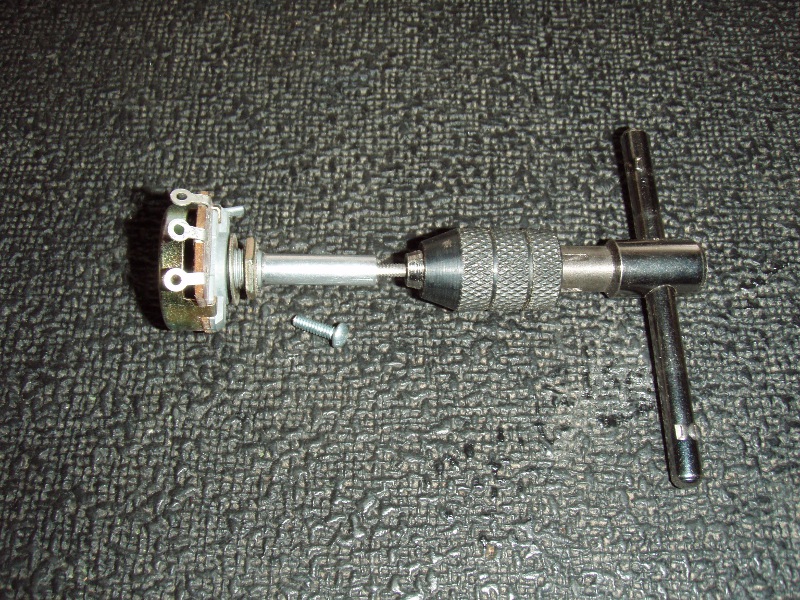
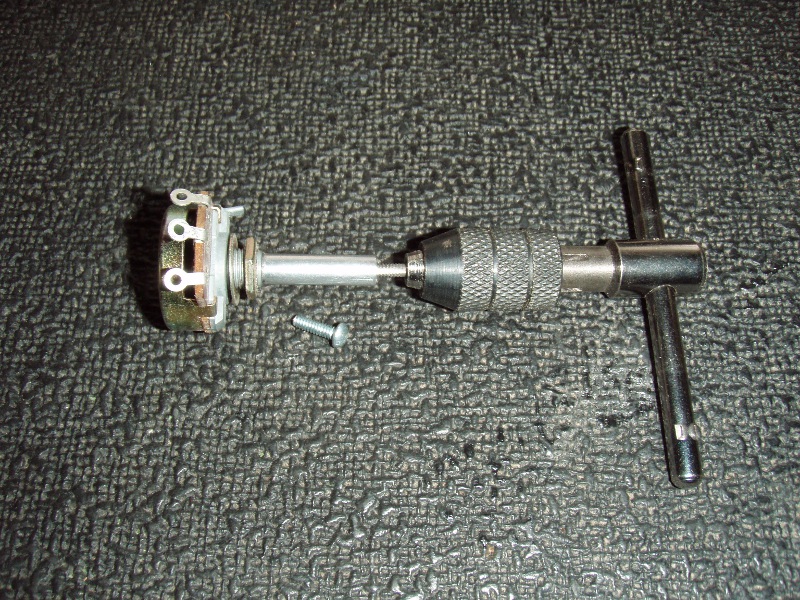
Here is an action shot of the pot being tapped with a 4/40 tap...
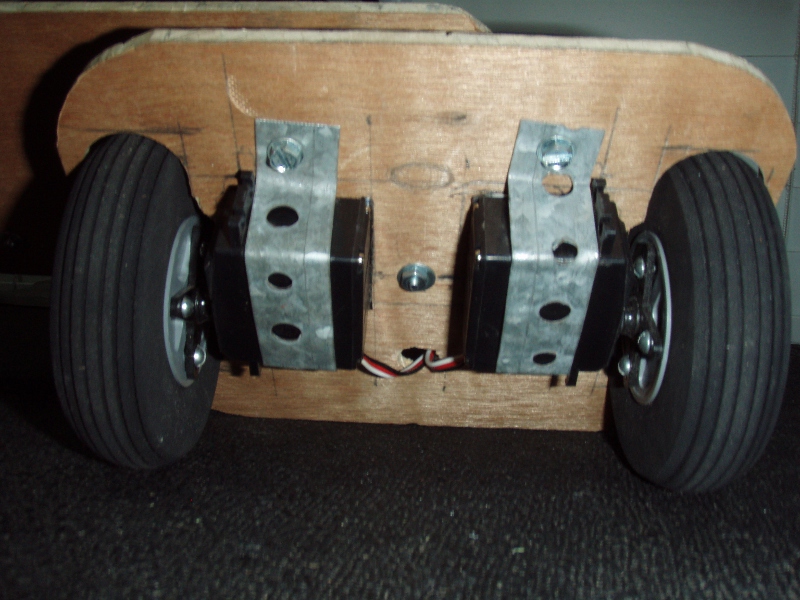
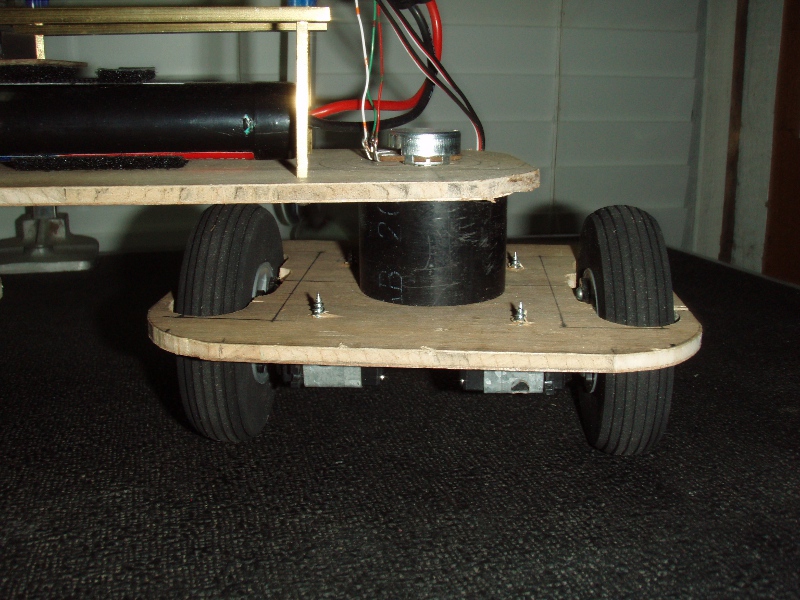
Notice the custom fabricated high speed motor mounts underneath.(the holes reduce wind resistance)
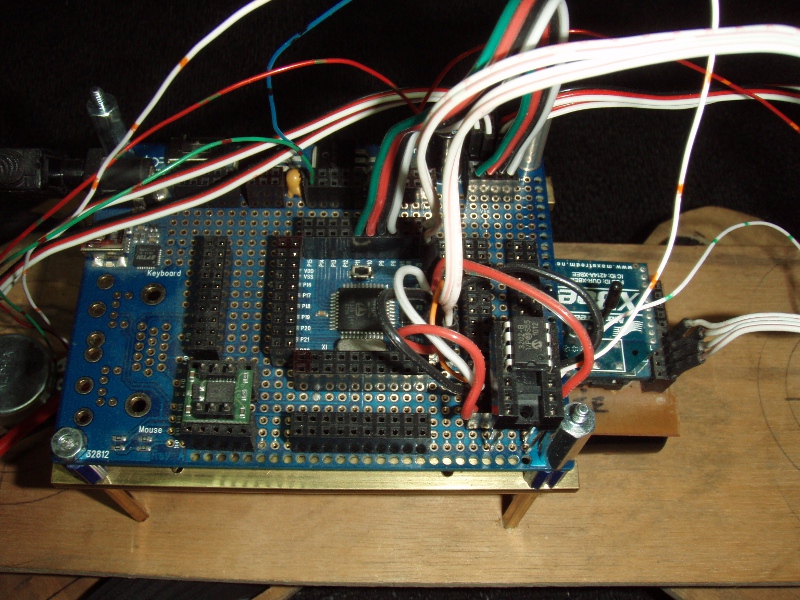
I would not want to stall all four servos at once, It makes the voltage regulator a little warm to the touch..
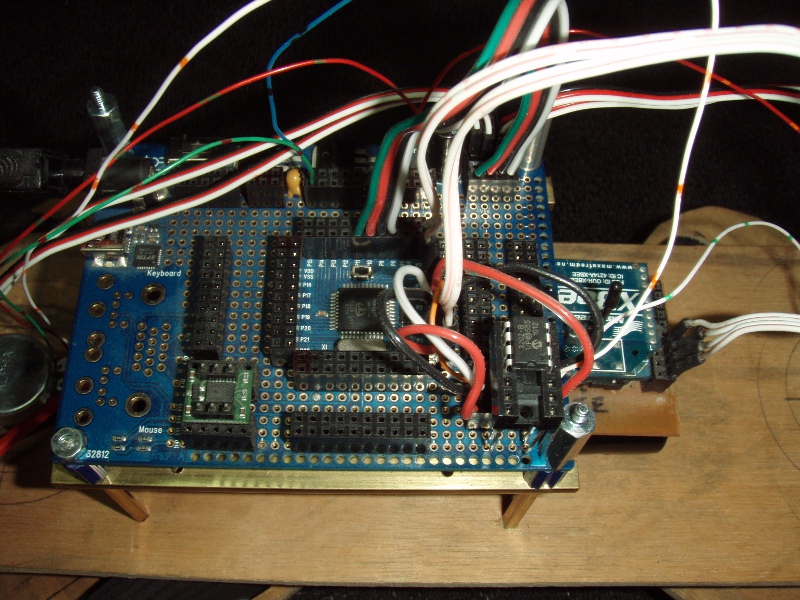
I do have hopes and dreams of making the 10K pots and the Memsic 2125 actually do something...
Right now, it takes two thumbs on the N64 joystick C and D pads to operate the thing, (takes a little practice..)
It could use alot more horse power, and a wiring harness, but it sure is fun to putt around with.
-Tommy
Glad I finally started this build, This thing is a kick to drive around.
The 10K pots on each end only allow for about 250 degrees of steering, but thats ok, It would have been
extra expense because of the special wire management issues involved with 360 degrees of steering rotation...
The exact length of pipe and the pot shaft was dictated by tire clearance under the frame.
The "axle" is 1 1/2" ABS pipe, cut to the same length as the protruding shaft.
Here is an action shot of the pot being tapped with a 4/40 tap...
Notice the custom fabricated high speed motor mounts underneath.(the holes reduce wind resistance)
I would not want to stall all four servos at once, It makes the voltage regulator a little warm to the touch..
I do have hopes and dreams of making the 10K pots and the Memsic 2125 actually do something...
Right now, it takes two thumbs on the N64 joystick C and D pads to operate the thing, (takes a little practice..)
It could use alot more horse power, and a wiring harness, but it sure is fun to putt around with.
-Tommy
800 x 600 - 227K
800 x 600 - 238K
800 x 600 - 280K
800 x 600 - 230K
800 x 600 - 275K
Comments
-Phil
Please stand by for video, apparently, the pyramid I placed over the top of my batteries was built wrong,
and seems to have had no effect on the batteries long term storage... (like 3 years of storage).
If one of my old batteries can hold a charge for more then 30 seconds, We can has good video..
Honestly, I expected 10 different links to dual steering robots. But then again, I have never seen one,
Except in the back of my mind, and that image would not go away, so I built the thing...
-Tommy
This is a very interesting project. With the PPPB, it could use a Propeller algorithm to drive itself and coordinate the wheel platforms for interesting and useful motions. It looks like they could traverse up and over the perimeter of rocks and planetary mounds. Do you have Mars in mind?
[video]
Just needs a little help from the Memsic 2125, I know it will balance itself...
I want to cut it in half and add a ball joint and another pot, but that is far in the future.
-Tommy
-Phil
It actually is very stable if I'm not trying to do stunt maneuvers.
This might be the video that erco has been waiting for...
[video]
Short but sweet. :thumb:
I want to articulate the mid span so it will twist and hopefully keep the tires in contact with the ground.
It really doesn't have enough horsepower for rock climbing, so I have not put it to any climbing tests.. yet..
Really just wanted to see if it was worth pursuing, I think it will be worth a second look...
-Tommy
Just gonna stash my code in here so I can have it if my hard drive crashes again...
Well done, and what a great video! (how's it do in sand?)
-Matt
As far as the sand performance of CastersEnd goes, Sand requires much much more horsepower...
Having built full size sand rails and buggies, and have hours of ATC and Quad Runner flying time in the dunes.
It is a goal of mine to make a autonomous roaming sand buggy to play with.
It would have to be like the Parallax Quad Rover to be usefull in the dunes though.
"GOT SAND?"
-Tommy
What if each wheel assembly was a self contained unit with a Prop, Battery and motors. Then you could go 360 without wiring issues. you could use an IR link to communicate betwen the two wheel assemblies and the main control unit on top.
We are going to mars now...
Well OK, don't really stand by, you should probably do other things, It might be a while.
cuz first I gotta rip the motors out of the Roomba, clean and test them and then,
Print and solder an H_bridge circuit board, and then find a place for everything to fit on-board the thing...
However, the biggest challenge to starting and completing all that, is...
I just got a Scribbler2. :thumb::thumb: And, It's all shiny and red, It has a serial cable and Sharpie marker sticking out of it..
And now, the delightfully juicy redness is calling out loudly to me..
Even now as I type.. the pull is to strong.. I know I must resist.. must not scribble... must resist..AARGGH
Are the brains of these $5 Roombas fried?
You know they're really easy to hack right?
I do think it would be mean to your new Scibbler2 to ignore it.
Duane
Keep thinking outside the box...
You guys OK with the picture? or do I gotta put up video too?...
Allrighty then, I will get back to work on upgrading CastersEnd servos to Roomba motors,
Will need to redraw most of the moving parts...
Hrmm, wonder how long it will take to enter those coordinates into the Scribbler2?...
@Duane Degn I am not sure, I was only after the motors, Whats a good way to find out? It has no battery.
Would you want the brains if they are not fried? You can have them if you want them.
I should tell you however, I did not check with the next of kin to see if the Roomba signed the donor card.
But hey, it's in the name of science.. right?..
@whit Whit, that is exactly what I was after when I first started thinking about CastersEnd.(well that, and I hate casters.)
I have yet to put the Memsic 2125 to work balancing any robot, let alone a dual steering monster.
So I am in for a good time to be sure..
Also, I am reconsidering the use of IR instead of Pots to detect the position of the axle carrage.
What do you good folks think about that?
-Tommy
Great scribbling and drafting...