

Hybred Boe Bot
 Crazyrabbit
Posts: 116
Crazyrabbit
Posts: 116
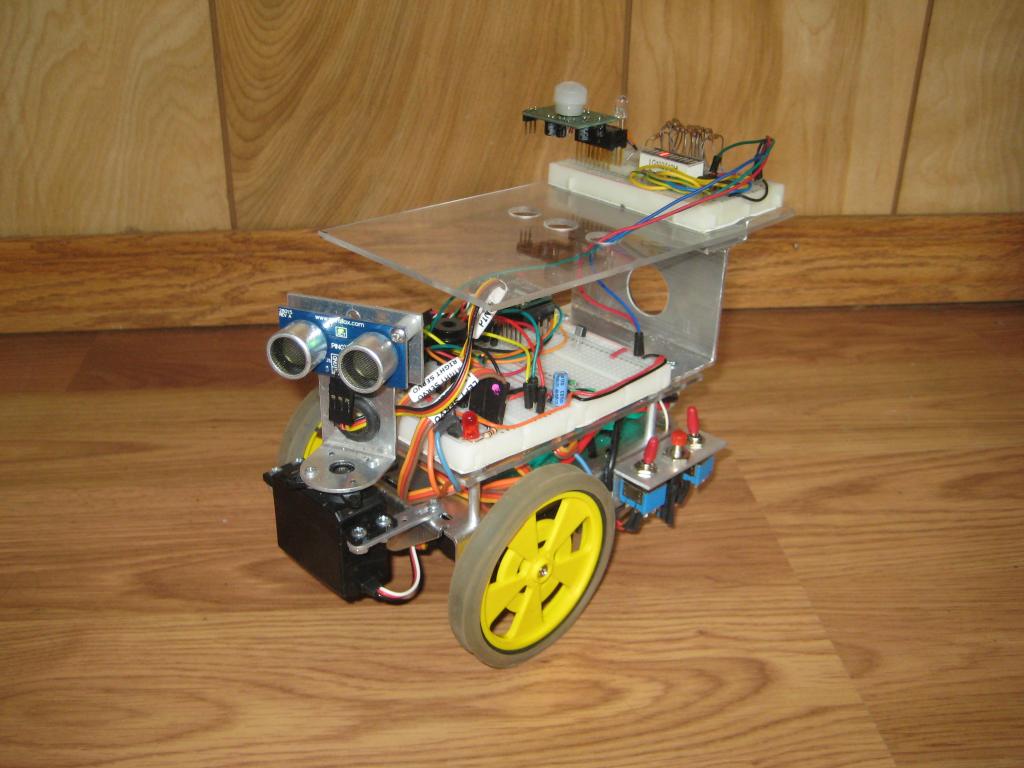
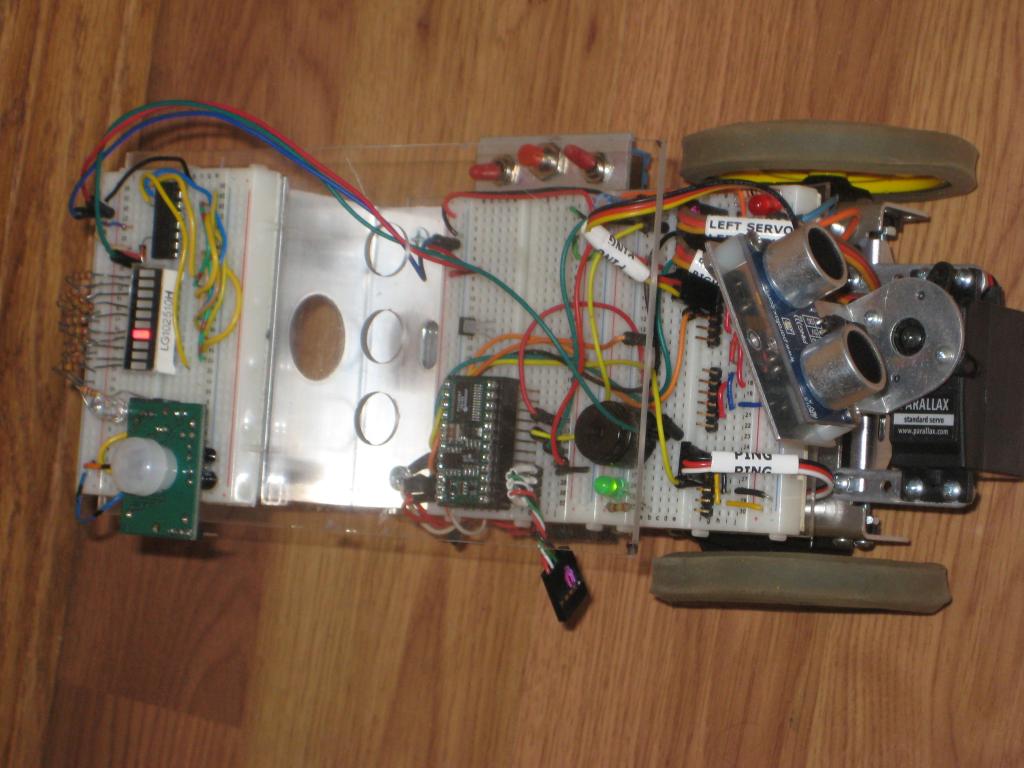
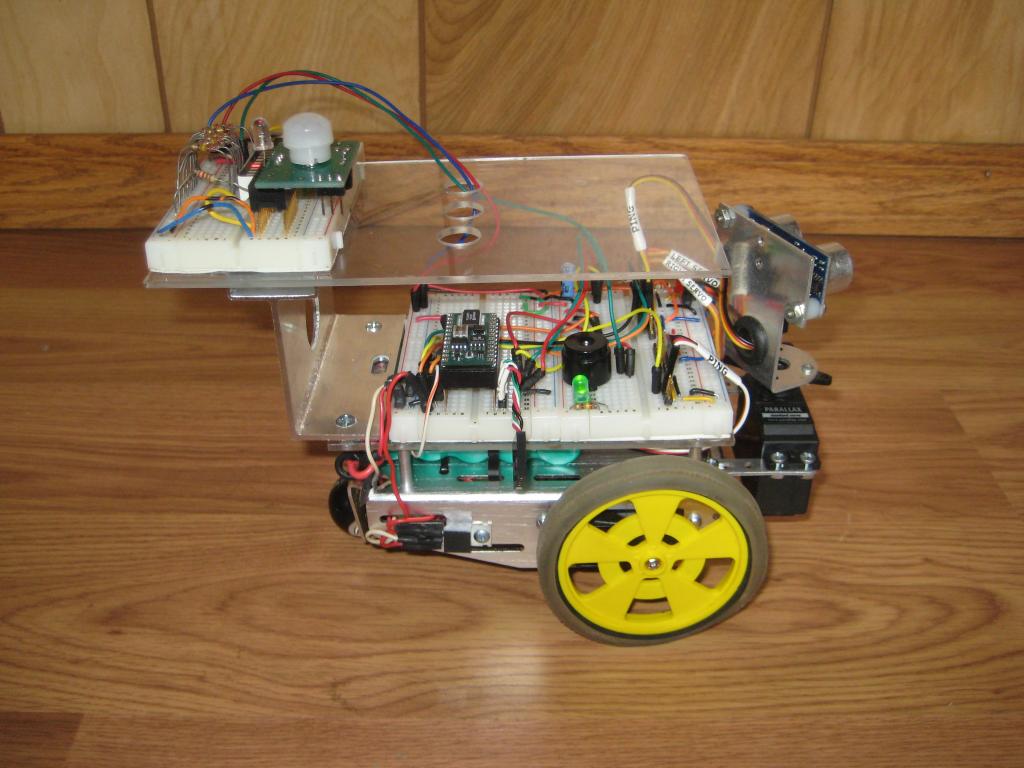
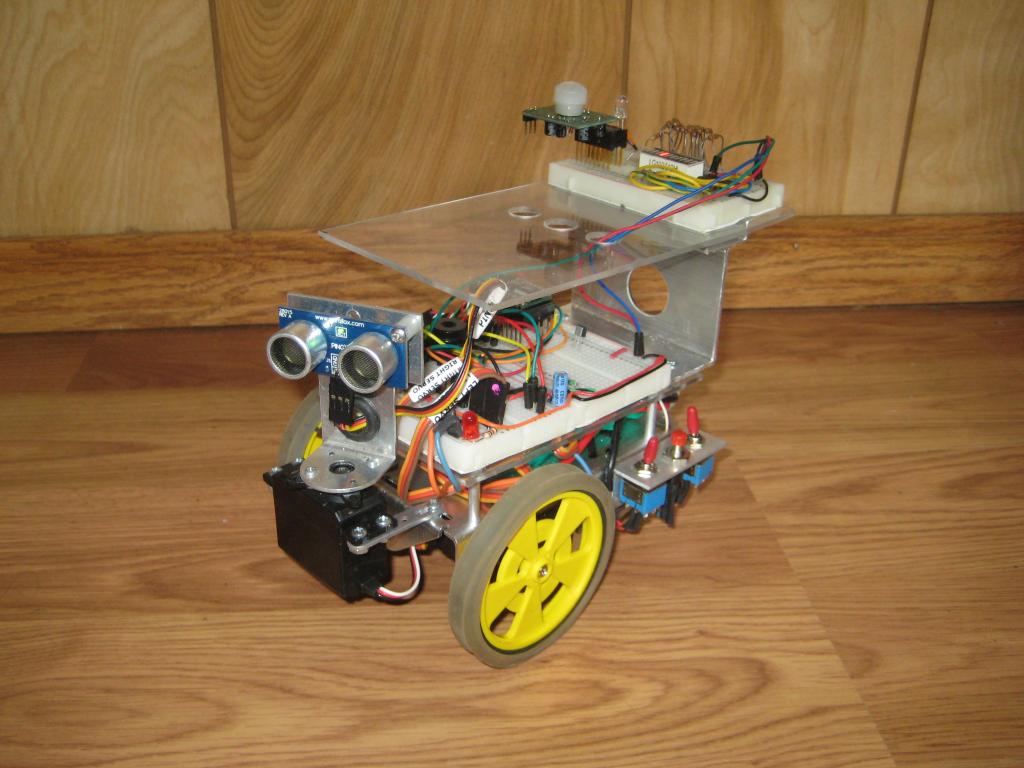
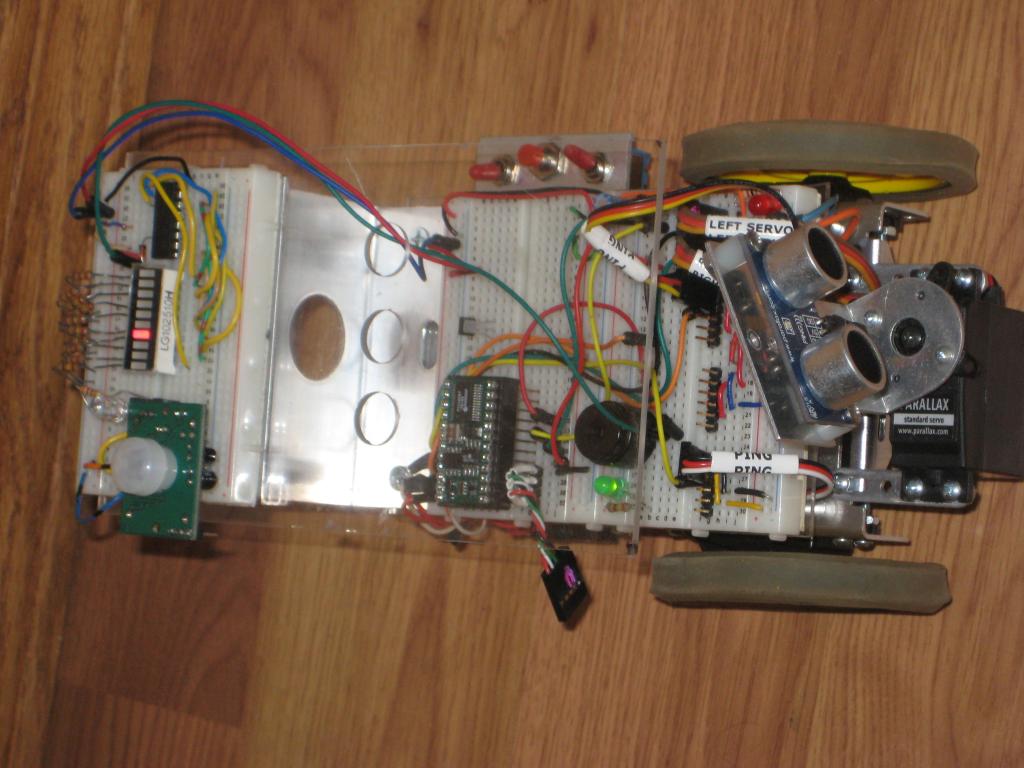
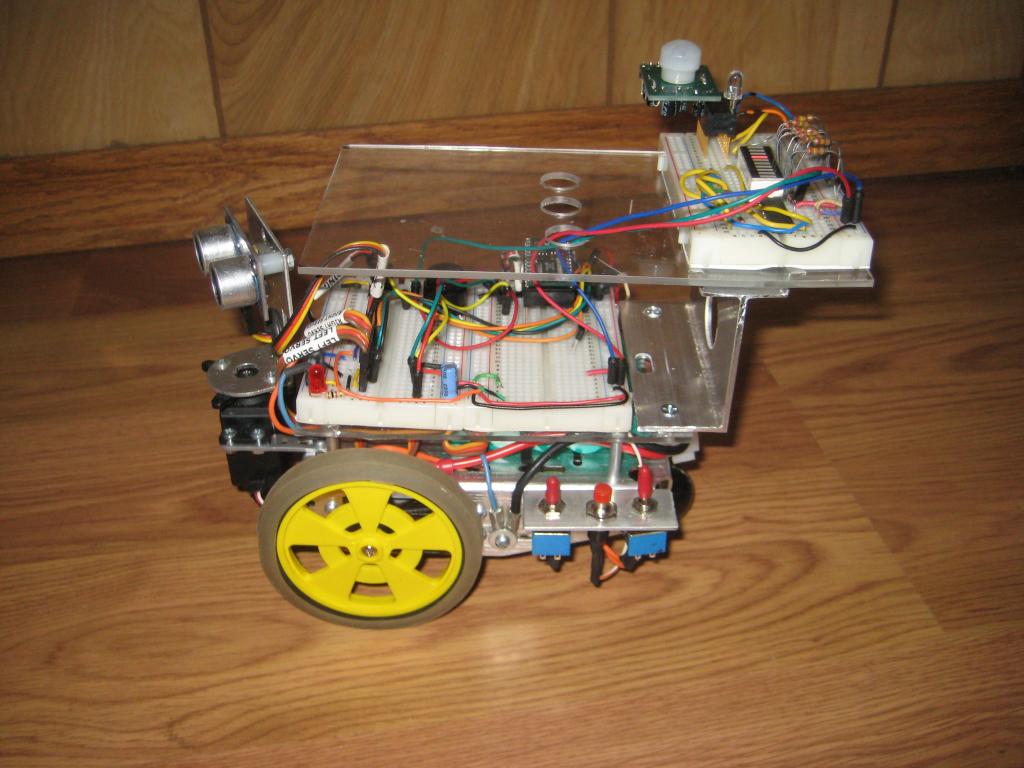
I finally completed my new Boe Bot. It was built up from just the body. I chose the Boe Bot because it is small and easy to add things without drilling holes. It is getting quite heavy though with 2 battery supplys and mabe 3 in the near future. I am planning on piling up the electronics. Here is a video with just the ping. It works OK but can see it will need more traction because of the weight. I am already using higher power servos. Here is a video of a trial run http://www.youtube.com/watch?v=VoYSpf0Inwo

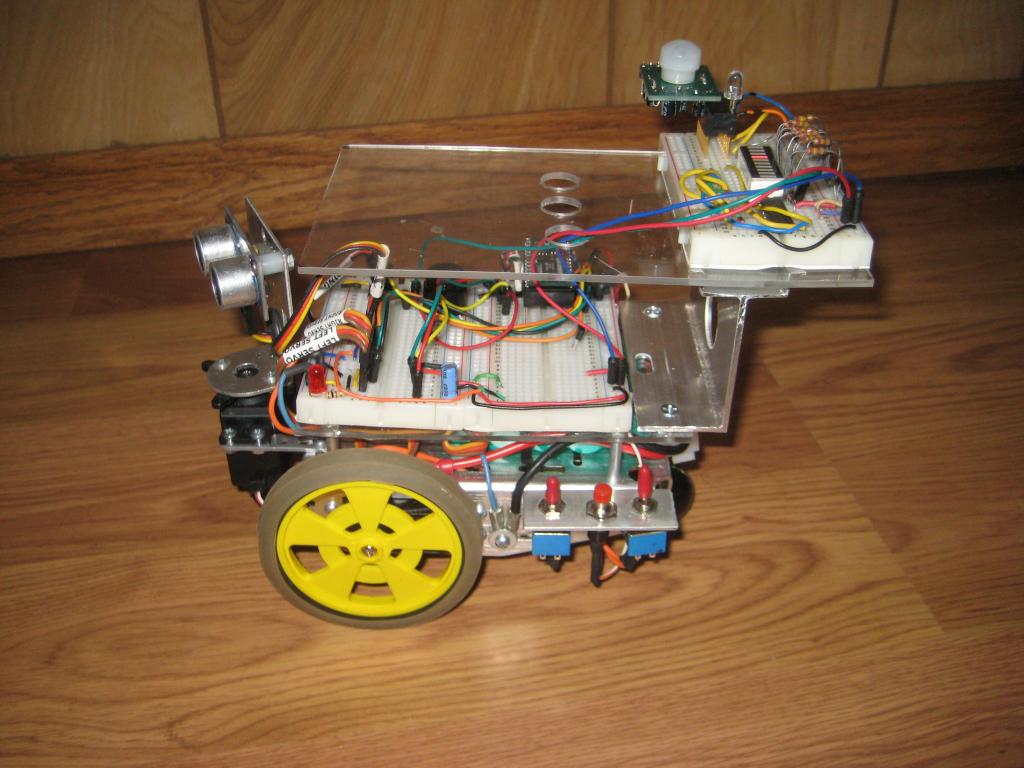
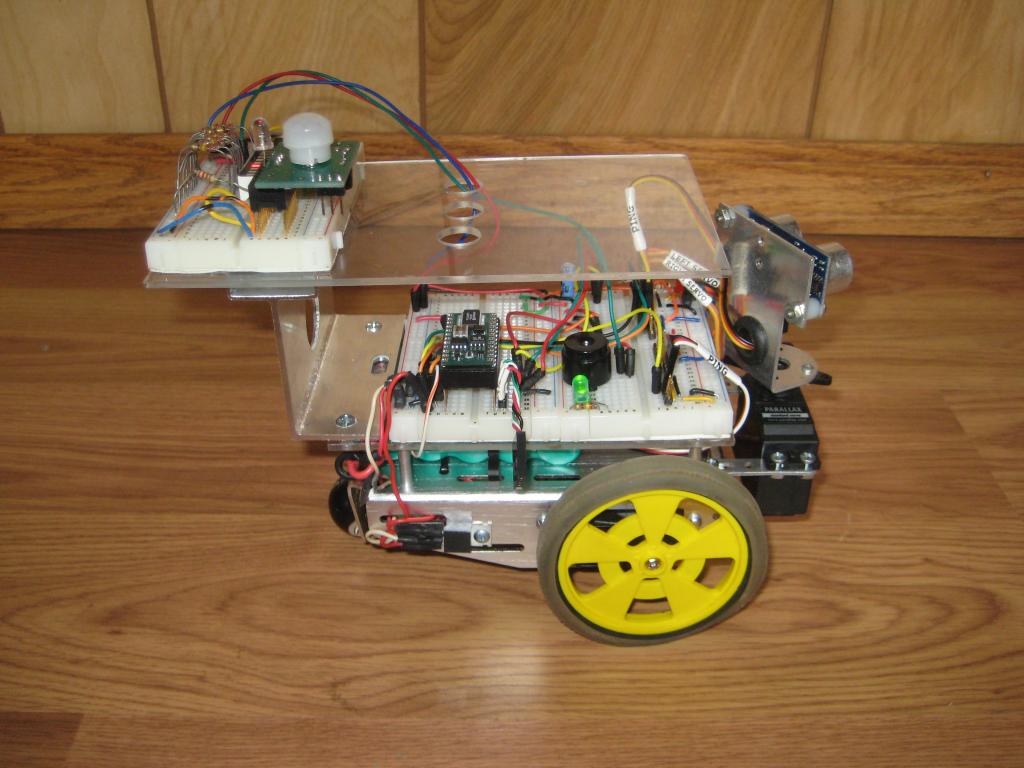
Here is a video with some improvements I added to the bot. One was adding a speaker and volume control and the other was upgrading the wheels. Wheels do make a big difference. Haven't got to hacking the program yet.
http://www.youtube.com/watch?v=9kc3d8v40po
Here is a video with some improvements I added to the bot. One was adding a speaker and volume control and the other was upgrading the wheels. Wheels do make a big difference. Haven't got to hacking the program yet.
http://www.youtube.com/watch?v=9kc3d8v40po
1024 x 768 - 91K
1024 x 768 - 87K
1024 x 768 - 91K
1024 x 768 - 92K
Comments
That's a numbers game, if you will, not infallible - a lot depends upon timing (clunk.)
My thinking, now, is to use IR for obstacle avoidance and scanning/sweeping the Ping to figure the next direction.
Please tell me more about your "higher power servos".
The boe-bot chassis is a great platform for experimentation.
I tend to add (at a minimum) left & right front "virtual bumpers" (reflective IR sensors) good to at least 10cm as I'd hate for robots to run into something they just missed in the last sweep...
[I go to Parallax products first and foremost, nobody plugs the organisation more than I do.]
Spelling Police notice. Hybred should be Hybrid.
Organisation was going to be put on the missed spelling bee also, until i found:
I guess it's the Aussie.
I learned sumthin' new today. (That's correct spelling for some of our under funded public schools)
Now you know why the Colonists broke away from England.
-- Gordon
Till or until, toward or towards, 6 of one and a half dozen of the other.
[Waiting for that servo link. Anyway.]
You may want to think about adding this sensor on the turret with the Ping:
http://www.pololu.com/catalog/product/1134
(I'm hoping Parallax makes something similar, but for now Pololu is a good low-cost source.)
These are *digital* distance sensors, set to trigger on proximity at 4" or closer. Output goes LOW if there's an object within this distance.
Ultrasonic sensors are not very reliable if the robot or sensor is in motion. This is due to the dispersion of the sound waves and Doppler effects. The IR sensor is immune to these, so you can use it as a backup warning. You don't have to rely solely on the ultrasonic.
They're also handy because they have an internal 300+ Hz refresh rate, so they react to change much faster. You can even use this feature to slow down the samples from the Ping, and thus save some current consumption.
-- Gordon
Hi Gordon,
I am also working on a "FrankenBoe-Bot". I purchased four of the sensors to add to my BOT. The thing I noticed is that they don't seem to be able to detect black. I powered one up and held it up to different objects, there is a red light on the board that turns on when the sensor detects an object. When I held the sensor near a black plastic box, the sensor would not come on.
Regards,
zappman
Hopefully you don't have black baseboards in your house! Otherwise, you'll need to coordinate the readings with the ultrasonic -- that's what sensor fusion is for, after all -- and cross your fingers more tightly.
-- Gordon
http://www.youtube.com/watch?v=NWgUt0lFtEk&feature=mfu_in_order&list=UL