

Beginner PWM questions
 Ttailspin
Posts: 1,326
Ttailspin
Posts: 1,326
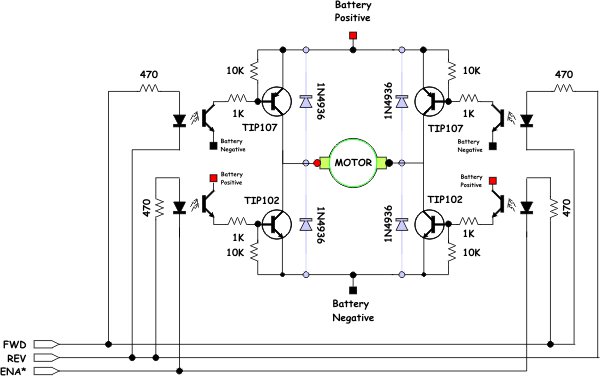
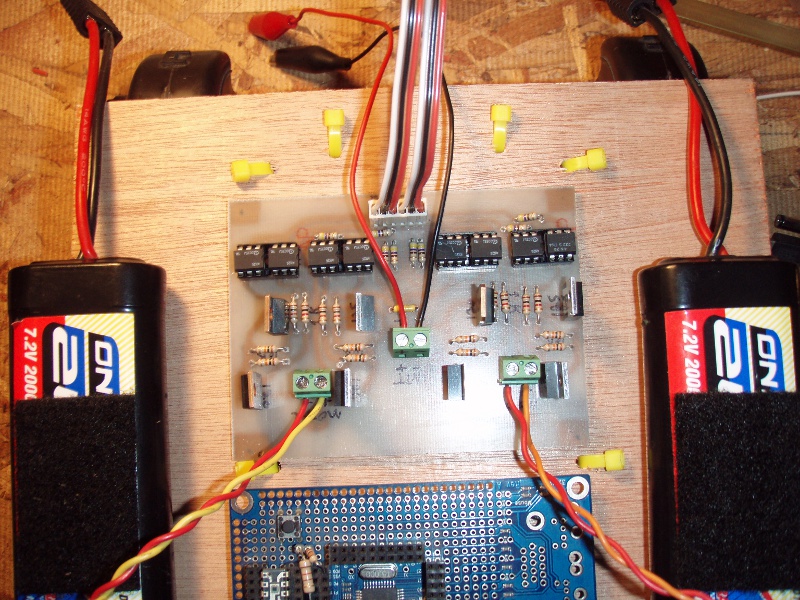
I would like to try out the PWM options on this H-Bridge circiut that I have etched and assembled from this schematic...
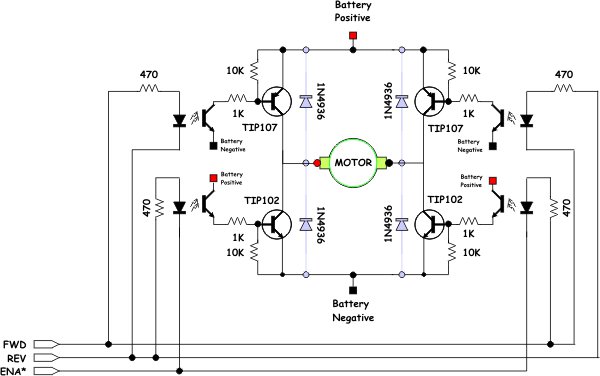
I made two of these circuits side by side on the same board...
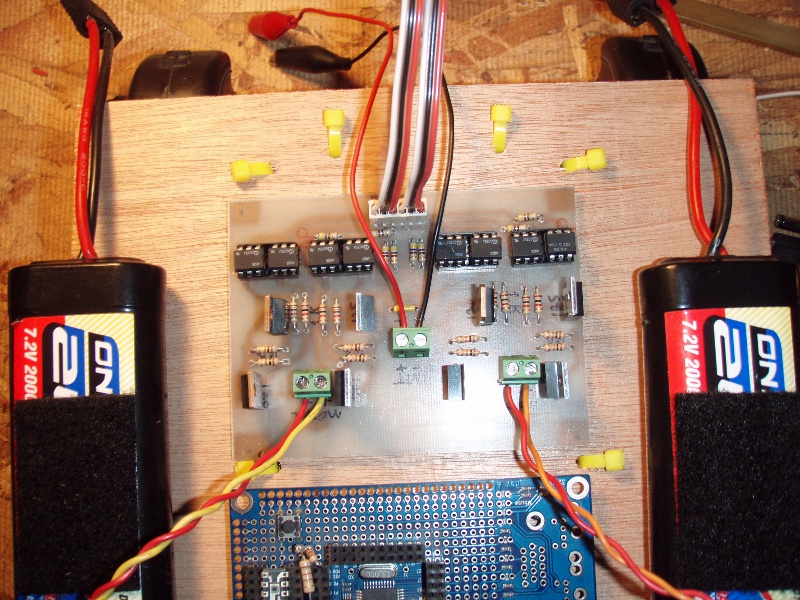
It works great with the "roomba" motors I have, and also some little 3volt motors that draw almost 3 amps.
Here is what I am trying to do...
I can make this work without using PWM on the ENA* pin,(i.e: only set ENA* pin as an output, and make it output low, 0 volts)
The code without PWM is simple enough... outa[13..8] := %100100 makes the two motors go forward as expected,
But when I try my brand of PWM, the results are not what I expected...
PWMForward "looks" like it is working..... 1, 0, PWM1, 1, 0, PWM1
PWMReverse "looks" like it is working......0, 1, PWM1, 0, 1, PWM1
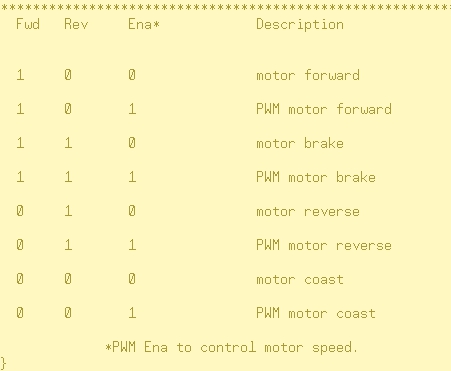
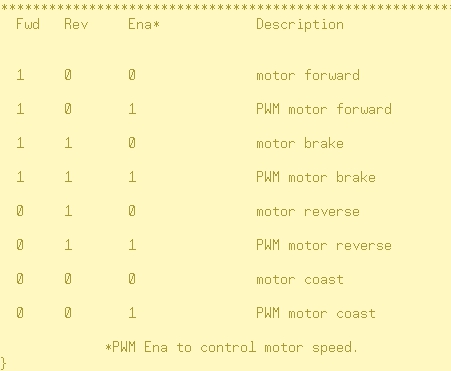
Brake should look like the chart................1, 1, PWM0, 1, 1, PWM0
but Brake does not work as it did before... 1, 1, 1, 1, 1, 1 all the pins come on for the (distance).
So my question is, How would/should I go about making 4 pins a solid 1 or 0, and 2 pins PWM at the same time?
from the same SUB? (i.e.: SUB PWMForward(distance), SUB PWMReverse(distance) ect, ect...
Thanks very much
-Tommy
I made two of these circuits side by side on the same board...
It works great with the "roomba" motors I have, and also some little 3volt motors that draw almost 3 amps.
Here is what I am trying to do...
I can make this work without using PWM on the ENA* pin,(i.e: only set ENA* pin as an output, and make it output low, 0 volts)
The code without PWM is simple enough... outa[13..8] := %100100 makes the two motors go forward as expected,
But when I try my brand of PWM, the results are not what I expected...
CON
_clkmode = xtal1 + pll16x 'Standard clock mode * crystal frequency = 80 MHz
_xinfreq = 5_000_000
scale = 16_777_216 ' 2³²÷ 256
PUB Main | pin
'Configure counter modules.
ctra[30..26] := %00110 ' Set ctra to DUTY mode
ctra[5..0] := 8 ' Set ctra's APIN
ctrb[30..26] := %00110 ' Set ctrb to DUTY mode
ctrb[5..0] := 11 ' Set ctrb's APIN
dira[8..13]~~ ' Set Pins to output
start
PUB start
PWMForward(30)
Brake(40_000)
PWMReverse(30)
PUB PWMForward(distance) | duty
repeat distance
repeat duty from 200 to 255 ' Sweep duty from 0 to 255
frqa := duty * scale * 2 ' Update frqa register
frqb := duty * Scale * 2 ' Update frqb register
outa[10..9] := %10
outa[13..12] := %10
waitcnt(clkfreq/600 + cnt) ' Delay for 1/???th s
PUB Brake(distance)
repeat distance
outa[13..8] := %110110
PUB PWMReverse(distance) | duty
repeat distance
repeat duty from 200 to 255 ' Sweep duty from 0 to 255
frqa := duty * scale * 2 ' Update frqa register
frqb := duty * Scale * 2 ' Update frqb register
outa[10..9] := %01
outa[13..12] := %01
waitcnt(clkfreq/600 + cnt) ' Delay for 1/???th s
.....................................................pin 13, 12, 11,.....10, 9, 8PWMForward "looks" like it is working..... 1, 0, PWM1, 1, 0, PWM1
PWMReverse "looks" like it is working......0, 1, PWM1, 0, 1, PWM1
Brake should look like the chart................1, 1, PWM0, 1, 1, PWM0
but Brake does not work as it did before... 1, 1, 1, 1, 1, 1 all the pins come on for the (distance).
So my question is, How would/should I go about making 4 pins a solid 1 or 0, and 2 pins PWM at the same time?
from the same SUB? (i.e.: SUB PWMForward(distance), SUB PWMReverse(distance) ect, ect...
Thanks very much
-Tommy
600 x 376 - 31K
800 x 600 - 269K
451 x 371 - 35K
Comments
Before braking you run PWMForward which leaves the DUTY counters running with $FE000000 which is pretty much high all the time (so may look like a solid high). As outputs from outa, phsx and video h/w are ORed together you will keep seeing the forward PWM also during brake. If that's not what you want you'll have to disable/reprogram the counters temporarily.
You need much slower PWMs. Here is a possible solution with two 10 kHz PWMs:
CON _clkmode = xtal1 + pll16x 'Standard clock mode * crystal frequency = 80 MHz _xinfreq = 5_000_000 VAR long cog long pwm1, pwm2, period long stack[20] PUB Main | pin period := clkfreq / 10_000 ' 10kHz PWM frequency cog := cognew(pwm_cog,@stack) dira[9..10]~~ ' Set Pins to output dira[12..13]~~ start pwm1 := pwm2 := -1 ' min. PWMs repeat ' keep pins alive PUB start repeat PWMForward(30) Brake(40_000) PWMReverse(30) PUB PWMForward(distance) | duty outa[10..9] := %10 ' set forward outa[13..12] := %10 repeat distance repeat duty from 0 to period step 20 ' Sweep duty from min to max pwm1 := duty ' Update pwm1 register pwm2 := duty ' Update pwm2 register waitcnt(clkfreq/500 + cnt) ' Delay for 1/???th s PUB Brake(distance) repeat distance outa[13..8] := %110110 'waitcnt ? PUB PWMReverse(distance) | duty outa[10..9] := %01 ' set reverse outa[13..12] := %01 repeat distance repeat duty from 0 to period step 20 ' Sweep duty from min to max pwm1 := duty ' Update pwm1 register pwm2 := duty ' Update pwm2 register waitcnt(clkfreq/500 + cnt) ' Delay for 1/???th s PUB pwm_cog : time ' 2 x 10kHz PWMs in own cog 'Configure counter modules. ctra[30..26] := %00100 ' Set ctra to NCO mode ctra[5..0] := 8 ' Set ctra's APIN ctrb[30..26] := %00100 ' Set ctrb to NCO mode ctrb[5..0] := 11 ' Set ctrb's APIN frqa := frqb := -1 ' negative pulse dira[8] := 1 ' Set pins to output dira[11] := 1 time := cnt + period repeat waitcnt(time) phsa := pwm1 ' pwm values: 0..period phsb := pwm2 time += period ' next cnt timeAndy
Thank you for your explaination, that is exactly what was happening, just as you described... and your explaination helped to fill in some of the holes I was digging for myself.
@ Ariba, it's allmost like you enjoy writing code...:cool:
Thank you for taking the time to write that, especially code like that, all commented and everything.
And it works great, just needed some adjustments to the Khz (10 was a little "chunky")
I increased the period to := clkfreq / 30_000, So that makes 30kHz PWM frequency? correct?
Trying to be cog "stingy" and make all of the motor "stuff" stay in one cog, so I will maybe move some
things around, and try to use just one cog, I run out of cogs fast, with my roaming robots...
Anyway, after realizing I had PWM on the brain, I tried just toggling the pins...
PUB PWMForward(distance) repeat distance outa[10..9] := %10 outa[13..12] := %10 !outa[11] !outa[8] waitcnt(clkfreq / 405 + cnt) ' Change number to control motor speed !outa[11] !outa[8] waitcnt(clkfreq / 505 + cnt) ' Change number to control motor speedI think I was stepping thru what amounts to PWM,?Again, thanks for the help, I love this forum.
-Tommy