

Balanse robot

Hello,
I am new on this site, so i will introduce myself.
I am a student electronics, and i am fascinated by robots. This is the third robot i have build in my life. I live in Belgium(the country with still no government).
I sow somewhere on the net a home made robot that could stand stil on 2 wheels, somting like a segway. So i got the idea for a new project to make.
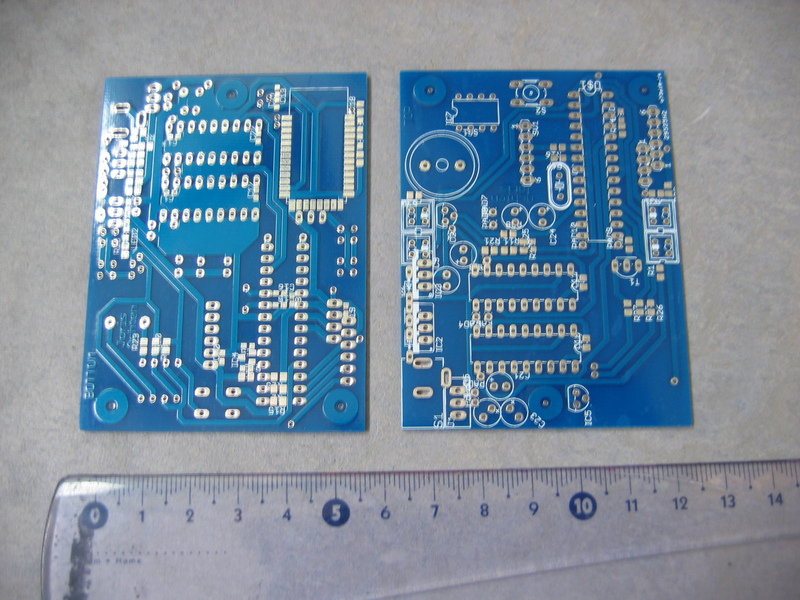
I started the design in september, between my studies i found a little spare time to build and program the robot. I add a lot of futures and flexibility in the electronic design. After a lot of designing and fitting i finished with an 2 layer PCB of 6 cm by 8 cm. (thats 2.4 by 3.1 inch for the Amerikan people)
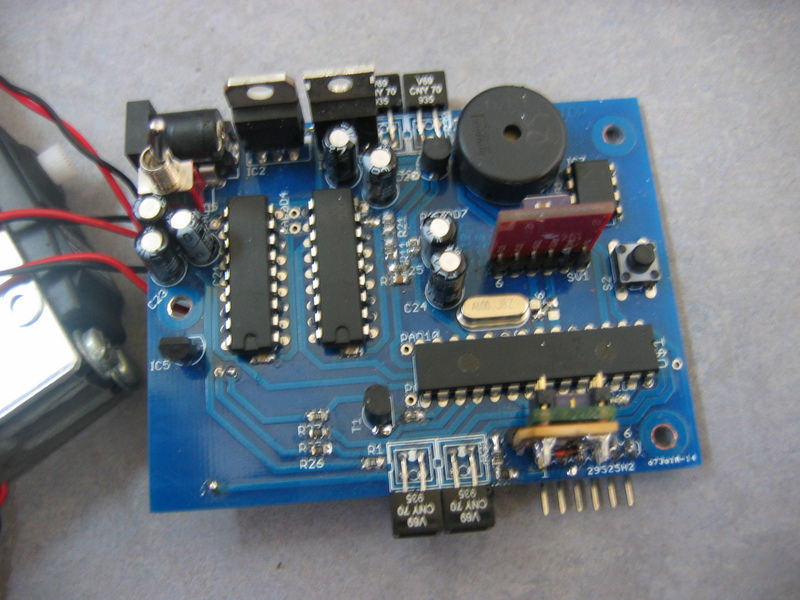
Hardware present on this PCB:
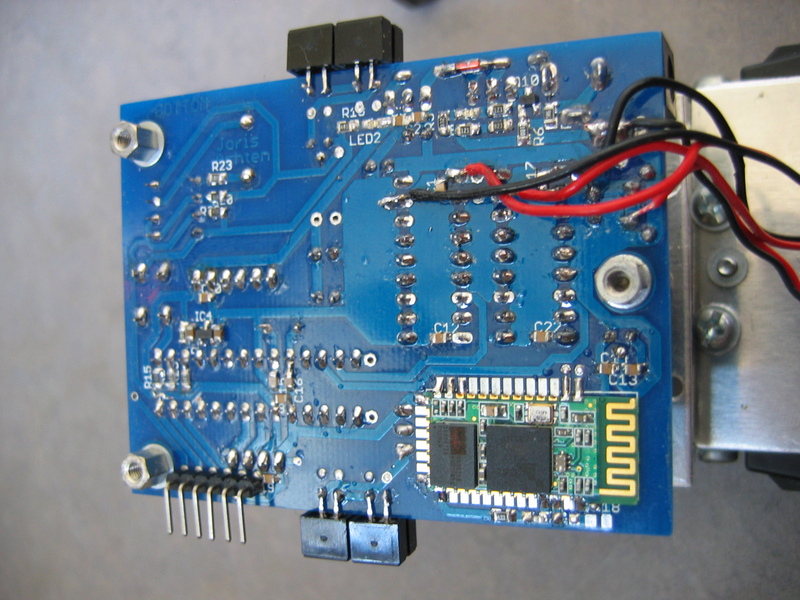
- 1 bluetooth communicator
- 1 Gyroscope
- 1 acceleration sensor
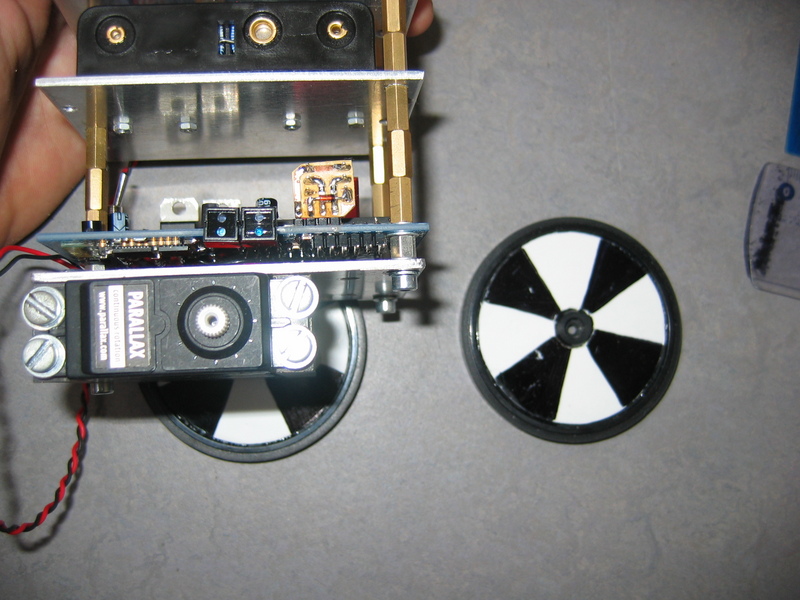
- 2 wheel decoders
- 2 motor servo's with coninue rotation
- 1 18F2520
- 1 battey charger
- 1 piezo speaker
- 1 indication LED
- I²C connection for expandable modules (not yet implanted on the PIC, but bussy with it)
- Program connection for PIC (never used, always programmed with a boot-loader and bluetooth connection)
What can it do:
- Try not to fall (main goal)
(main goal)
- Control the drive direction on a PC with bluetooth (busy with an android application, but need some help )
)
- Reprogramming with no program hardware tools or cables, just Bluetooth connection.
I want to add:
- line follow module, already designed and build a sensor PCB. But the firmware on the sensor PCB is not ready. (stuck on the I²C communication, but i will try to fix it this weekend)
- Object detection, same as line follow module.
- Wirless cam with wifi or bluetooth, still a dream
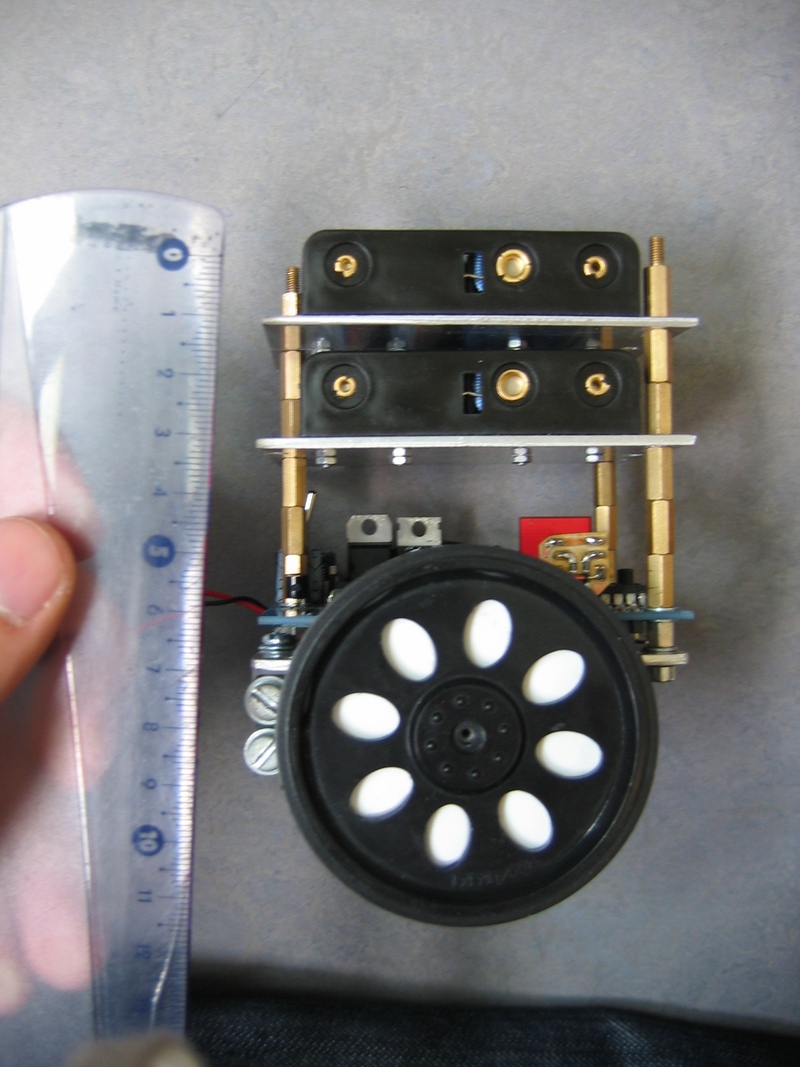
Project fotos:

Big sticker of Parallax
Project movie:
 (cable is gone by now, function of the cable was for charging the 8 batteries)
(cable is gone by now, function of the cable was for charging the 8 batteries)
I have a small site, with a little bit of info (will expend when its done). But my main language is Dutch, so the site is written in Dutch. But maybe you can use google translator, or lean dutch
I hope you enjoy my project.
If there is intesting from other people i will update it when the new modules object tracking and line following module is working
Greets from Belgium (hope my English is not to bad)
- Joris Achten -
I am new on this site, so i will introduce myself.
I am a student electronics, and i am fascinated by robots. This is the third robot i have build in my life. I live in Belgium(the country with still no government).
I sow somewhere on the net a home made robot that could stand stil on 2 wheels, somting like a segway. So i got the idea for a new project to make.
I started the design in september, between my studies i found a little spare time to build and program the robot. I add a lot of futures and flexibility in the electronic design. After a lot of designing and fitting i finished with an 2 layer PCB of 6 cm by 8 cm. (thats 2.4 by 3.1 inch for the Amerikan people)
Hardware present on this PCB:
- 1 bluetooth communicator
- 1 Gyroscope
- 1 acceleration sensor
- 2 wheel decoders
- 2 motor servo's with coninue rotation
- 1 18F2520
- 1 battey charger
- 1 piezo speaker
- 1 indication LED
- I²C connection for expandable modules (not yet implanted on the PIC, but bussy with it)
- Program connection for PIC (never used, always programmed with a boot-loader and bluetooth connection)
What can it do:
- Try not to fall
- Control the drive direction on a PC with bluetooth (busy with an android application, but need some help
- Reprogramming with no program hardware tools or cables, just Bluetooth connection.
I want to add:
- line follow module, already designed and build a sensor PCB. But the firmware on the sensor PCB is not ready. (stuck on the I²C communication, but i will try to fix it this weekend)
- Object detection, same as line follow module.
- Wirless cam with wifi or bluetooth, still a dream
Project fotos:
Big sticker of Parallax
Project movie:
I have a small site, with a little bit of info (will expend when its done). But my main language is Dutch, so the site is written in Dutch. But maybe you can use google translator, or lean dutch
I hope you enjoy my project.
If there is intesting from other people i will update it when the new modules object tracking and line following module is working
Greets from Belgium (hope my English is not to bad)
- Joris Achten -
Comments
nice project and yes please post your progress
Also I note the RF-module (bluetooth I presume) on the board, it seems to match the Seeedstudio's BT module in appearance - is it currently used and if so does it perform well?