This robot, as well as similar ones today, are all about the doing, not what it does.
Building a robot is like practicing the piano. Keep at it and maybe someday you'll write a great symphony. But even if you don't, isn't the time you spent playing music a personal reward?
I love it. This looks EXACTLY like some of the things I build, including my first Trinity Fire Fighting Robot.
For anyone who reads the article in depth, see if you agree with me that there's a bug in the system. It's a rear wheel drive bot that doesn't have reverse. It seems like if the flashlight (torch, in the Queen's English) is shining from the rear of the robot, the bot will drive directly AWAY from the light. It will only drive toward the light if the flashlight is shining towards the front of the bot.
Erco, my sentiments exactly - it's a very cute robot that grabbed my heart the instant I saw it. You know how much I love Parallax Boe-Bots and this looks a lot like my early wood based and Boe-Bot robot incarnations.
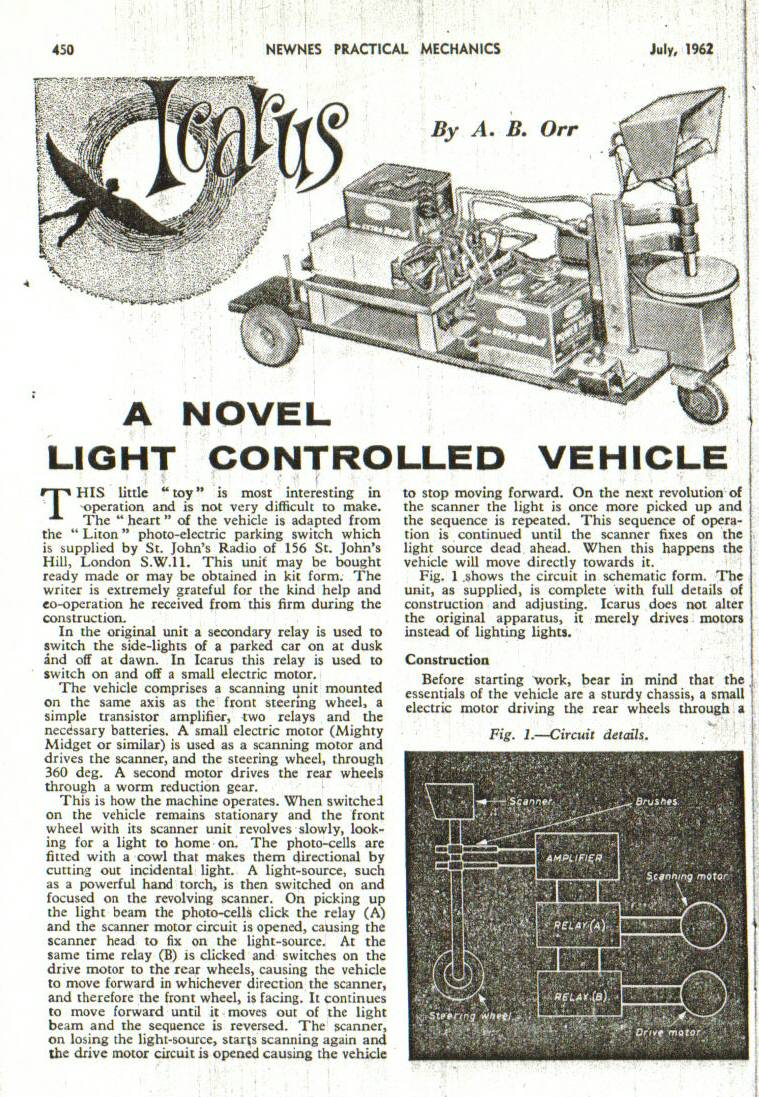
For your question about a possible limitation in the design... the key passage in the article is information about the photodetector cowling which prevents seeing any light from the rear and forcing a forward direction of vision. It would be nice to see a schematic to know how those two drive motor leads are wired, i.e. if there is a reversing circuit however there is no description of this that I noticed so apparently it's not included. The steering mechanism is a very ingenious use of fundamental mechanics and the overall design does appear that it would function as the inventor intended.
The design operation of this gold medal winning robot is described by Mr. Buckley:
When Icarus is looking towards the dark the turret revolves and the drive motor is off, as soon as the LDR sees a bright light the relay is switched and the scanning motor stops and the drive motor starts. This means Icarus can only seek light in front and about 45 degrees to each side. If the light is further round the drive wheel pushes the front wheels sideways and Icarus doesn't turn, and if the light is to the rear Icarus drives away from the light.
@H: Thanks, actually Buckley's article confirms my suspicion:
If the light is further round the drive wheel pushes the front wheels sideways and Icarus doesn't turn, and if the light is to the rear Icarus drives away from the light.
I knew something smelled fishy. Nonetheless, an amazing achievement for 1962!
Erco, you were right all along. You are the master. The next robot I build, I want you on my team. I'm designing a giant robotic stump with two or more DOF run by Stamps and Propellers. I've never connected very large (but lightweight) things to standard servos before. It's gonna be a first!
One thing I like to see and compare is a progression of retro robots every 10 years to see how the technology has changed. When I first started out, I worked on computers that still had some electromechanics inside. For example, the A5 still had a completely mechanical encoder with zillions of levers, rollers, and gears combined with solenoids , while the A4 was moving toward more solid state components. Ten years later the machines were all electronic. Ten years before they were all mechanical.
I'm designing a giant robotic stump with two or more DOF run by Stamps and Propellers.
Will you call your robot "the BASIC Stump" ?
Hey, all-mechanical toy robots were doing obstacle-avoiding "Roaming with BANG" (as opposed to Roaming with PING) back in 1962: http://www.youtube.com/watch?v=6rPPEE-uo1A
Hey, all-mechanical toy robots were doing obstacle-avoiding "Roaming with BANG" (as opposed to Roaming with PING) back in 1962: http://www.youtube.com/watch?v=6rPPEE-uo1A
Erco:
Now that's very funny! Aside from the Basic Stump Grinding Service listed via google, the name is up for grabs in the robotics world, and I think you just found a good name for the project. Ironically it will be programmed with a BASIC Stamp front end. Also, can you say Basic Stamp Stump 20 times very fast?



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please stop.
Can't all these old time robots be in the same thread?
Please?!
Duane
Building a robot is like practicing the piano. Keep at it and maybe someday you'll write a great symphony. But even if you don't, isn't the time you spent playing music a personal reward?
-- Gordon
For anyone who reads the article in depth, see if you agree with me that there's a bug in the system. It's a rear wheel drive bot that doesn't have reverse. It seems like if the flashlight (torch, in the Queen's English) is shining from the rear of the robot, the bot will drive directly AWAY from the light. It will only drive toward the light if the flashlight is shining towards the front of the bot.
Maybe that was covered on another page...
For your question about a possible limitation in the design... the key passage in the article is information about the photodetector cowling which prevents seeing any light from the rear and forcing a forward direction of vision. It would be nice to see a schematic to know how those two drive motor leads are wired, i.e. if there is a reversing circuit however there is no description of this that I noticed so apparently it's not included. The steering mechanism is a very ingenious use of fundamental mechanics and the overall design does appear that it would function as the inventor intended.
http://davidbuckley.net/DB/HistoryMakers/Icarus1aPMJul62-150dpi.jpg
"The photo-cells are fitted with a cowl that makes them directional by cutting out incidental light."
-Tor
http://davidbuckley.net/DB/Icarus.htm
The design operation of this gold medal winning robot is described by Mr. Buckley:
When Icarus is looking towards the dark the turret revolves and the drive motor is off, as soon as the LDR sees a bright light the relay is switched and the scanning motor stops and the drive motor starts. This means Icarus can only seek light in front and about 45 degrees to each side. If the light is further round the drive wheel pushes the front wheels sideways and Icarus doesn't turn, and if the light is to the rear Icarus drives away from the light.
If the light is further round the drive wheel pushes the front wheels sideways and Icarus doesn't turn, and if the light is to the rear Icarus drives away from the light.
I knew something smelled fishy. Nonetheless, an amazing achievement for 1962!
One thing I like to see and compare is a progression of retro robots every 10 years to see how the technology has changed. When I first started out, I worked on computers that still had some electromechanics inside. For example, the A5 still had a completely mechanical encoder with zillions of levers, rollers, and gears combined with solenoids , while the A4 was moving toward more solid state components. Ten years later the machines were all electronic. Ten years before they were all mechanical.
Will you call your robot "the BASIC Stump" ?
Hey, all-mechanical toy robots were doing obstacle-avoiding "Roaming with BANG" (as opposed to Roaming with PING) back in 1962: http://www.youtube.com/watch?v=6rPPEE-uo1A
Erco:
Now that's very funny! Aside from the Basic Stump Grinding Service listed via google, the name is up for grabs in the robotics world, and I think you just found a good name for the project. Ironically it will be programmed with a BASIC Stamp front end. Also, can you say Basic Stamp Stump 20 times very fast?