

Automatics Parking Gate

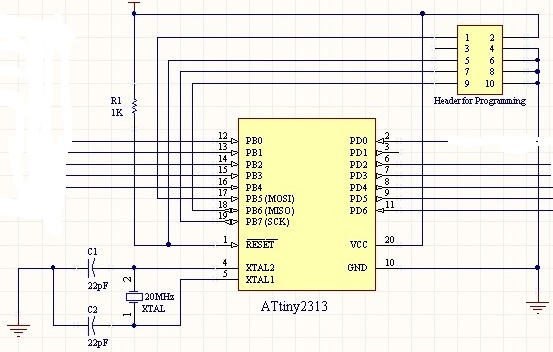
Recently i doing my project Automatics Parking Gate which used Attiny2313 microcontroller control parallax standard servo motor.
Attiny2313 external clock 20MHZ used and below is the code. After program below code and the clock non-stop move the motor CW.. I need to have code can control 0 degree and 90 degree.
#include <avr/io.h>
#include <util/delay.h>
//Simple Wait Function
void Wait()
{
uint8_t i;
for(i=0;i<50;i++)
{
_delay_loop_2(0);
_delay_loop_2(0);
_delay_loop_2(0);
}
}
void main()
{
//Port D pins as input
DDRD=0x00;
//Enable internal pull ups
PORTD=0xFF;
//Set PORTB1 pin as output
DDRB=0xFF;
TCCR1A|=(0<<COM1A0)|(1<<COM1A1)|(0<<COM1B0)|(0<<COM1B1)|(0<<FOC1A)|(0<<FOC1B)|(1<<WGM11)|(0<<WGM10);
TCCR1B|=(0<<ICNC1)|(0<<ICES1)|(1<<WGM13)|(1<<WGM12)| (0<<CS12)|(1<<CS11)|(0<<CS10);
ICR1=18429; //fPWM=50Hz (Period = 20ms Standard).
DDRD|=(1<<PD4)|(1<<PD5); //PWM Pins as Out
while(1)
{
OCR1A=650; //0 degree
Wait();
OCR1A=750; //90 degree
Wait();
OCR1A=850; //135 degree
Wait();
OCR1A=650; //180 degree
Wait();
}
}
Attiny2313 external clock 20MHZ used and below is the code. After program below code and the clock non-stop move the motor CW.. I need to have code can control 0 degree and 90 degree.
#include <avr/io.h>
#include <util/delay.h>
//Simple Wait Function
void Wait()
{
uint8_t i;
for(i=0;i<50;i++)
{
_delay_loop_2(0);
_delay_loop_2(0);
_delay_loop_2(0);
}
}
void main()
{
//Port D pins as input
DDRD=0x00;
//Enable internal pull ups
PORTD=0xFF;
//Set PORTB1 pin as output
DDRB=0xFF;
TCCR1A|=(0<<COM1A0)|(1<<COM1A1)|(0<<COM1B0)|(0<<COM1B1)|(0<<FOC1A)|(0<<FOC1B)|(1<<WGM11)|(0<<WGM10);
TCCR1B|=(0<<ICNC1)|(0<<ICES1)|(1<<WGM13)|(1<<WGM12)| (0<<CS12)|(1<<CS11)|(0<<CS10);
ICR1=18429; //fPWM=50Hz (Period = 20ms Standard).
DDRD|=(1<<PD4)|(1<<PD5); //PWM Pins as Out
while(1)
{
OCR1A=650; //0 degree
Wait();
OCR1A=750; //90 degree
Wait();
OCR1A=850; //135 degree
Wait();
OCR1A=650; //180 degree
Wait();
}
}
553 x 352 - 60K
Comments
You might get a better response to your question if you post it in Parallax's General Forum.