

Fredriks Demo Bot.

Howdy...
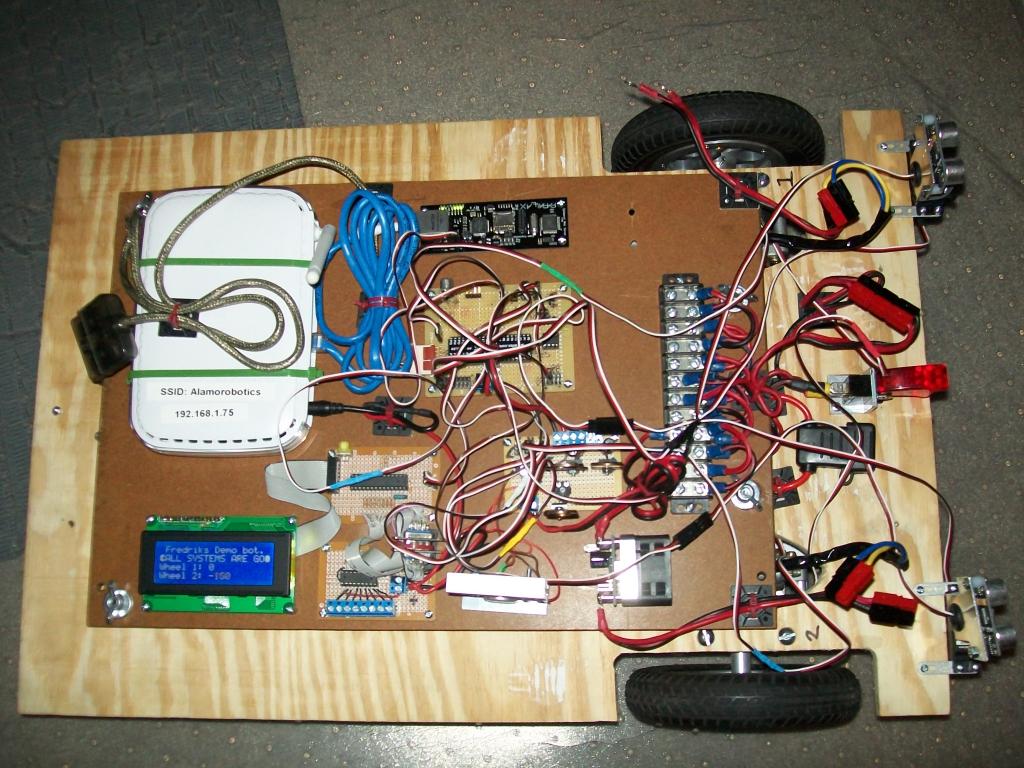
Here is a fun little project I'm finally getting around to...
I'm using the Wheel kit with wheel encoders and one caster wheel for the platform.
The Wheels are driven by two HB-25 motor controllers, however I managed to burn one of them out so it has been taken off.
I got two PING))) sensors mounted on servos for collision detection.
A four line LCD display for status messages.
A Spinneret module together with a WiFi router for a webpage with sensor information.
I took an SX chip and built a "Cylon Light effect" with 8 LED's that I mounted in the front of the robot.
Driving is done with a wireless PS2 controller, the dongle was disconnected when I took the picture though.
Planned improvements,
Gyro for turning specific degrees.
Fluorescent blue light underneath the robot.
Accelerometer to measure tilt.
Light, voltage and temperature sensors.
Controlling the bot via my Android phone.
Any suggestions of cool sensors I forgot ?
Here is a fun little project I'm finally getting around to...
I'm using the Wheel kit with wheel encoders and one caster wheel for the platform.
The Wheels are driven by two HB-25 motor controllers, however I managed to burn one of them out so it has been taken off.
I got two PING))) sensors mounted on servos for collision detection.
A four line LCD display for status messages.
A Spinneret module together with a WiFi router for a webpage with sensor information.
I took an SX chip and built a "Cylon Light effect" with 8 LED's that I mounted in the front of the robot.
Driving is done with a wireless PS2 controller, the dongle was disconnected when I took the picture though.
Planned improvements,
Gyro for turning specific degrees.
Fluorescent blue light underneath the robot.
Accelerometer to measure tilt.
Light, voltage and temperature sensors.
Controlling the bot via my Android phone.
Any suggestions of cool sensors I forgot ?
1024 x 768 - 149K
Comments
Looks great! erco is going to love the plywood base. He should be commenting soon...
What is your power source? 12 volt SLA, maybe?
The main fuse is 30 Amps and I made a power supplies for 3.3V, 5V and 6V.
Btw, long time no seen. Where have you been for such a long time?
(F
A lot of fun but also a lot of hard work.
At least it inspired me to dust off my Propeller skills and get going.
By the way, every robot need it's own web-page, hopefully I can learn to program my Android phone one day as well.
Another fun project, put a web-cam on the robot and have a laptop analyze the video stream and implement Vision recognition.
@Ahle2
Kul att n
http://forums.parallax.com/showthread.php?132895-Plastic-cover-for-the-HB-25-PCB.
Got a new HB-25, made sure to apply threadlock and made some basic roaming code.
Pings seem to work nice.
http://www.youtube.com/watch?v=8PPFZo2DGZM
http://www.youtube.com/watch?v=rqV66xzJ9qE
Keep those robots movin'...
The serial pin (22) on the Spinneret power supply header is level shifted to 5V so I used a 10K resistor in serial to protect my prop on the robot. This didn't work and it took me a few days to figure out that I needed to lower this resistor to 1K. It now works beautiful and I got a rudimentary web page up and running on the Spinneret.
Currently the web page displays dummy values but I plan to plug in real values tomorrow.
This is starting to get fun... ;-)