

Nuntius: The Garden Avenger Robot now with video

A couple of years ago I first saw one of those self contained game systems that consist of just the joystick and the AV wires that you plug into your TV. I was simply amazed at the simplicity and brilliance of the concept. You just plug it in and play.
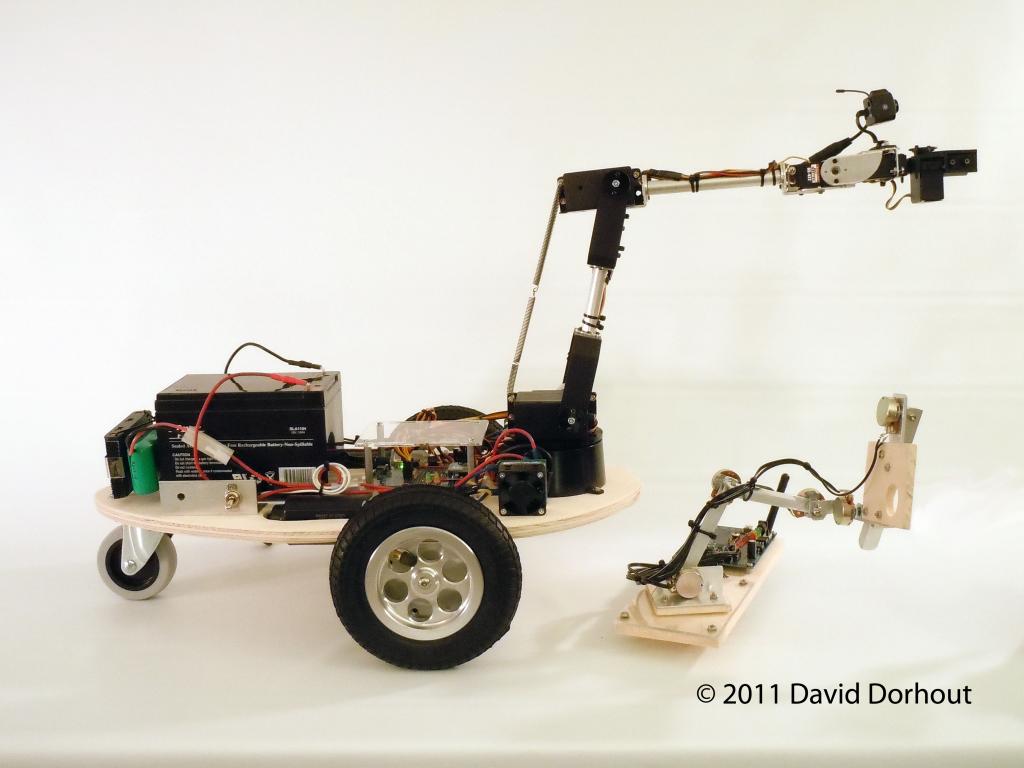
Nuntius is based on the same basic concept of those systems except it's a robot. The controller is a biomechanical input device that consists of a propeller proto board that measures the position of a 5 axis + gripper "mini arm" that you articulate with your hand, just like you would if you were actually there. The propeller then send the data via a XBEE to the robot. The result is that the big arm on the robot mirrors the mini arm and you control the robot by looking through a wireless camera that's attached to the gripper. The movement of the robot is proportional to the direction and how far the arm is extended (or pulled back for reverse). The further the arm is extended, the faster it goes in that direction. The robot only moves while you're holding down a button on the proto board. This allows you to drive the robot around and then stop and examine something with just a button and the mini arm. You just plug it in and do whatever... weed the lawn, weed the garden, weed the driveway, take the dog for a walk... from the safety and comfort of your couch.")
Dave
Major components:
2 Propeller proto boards (from last year's UPEC & UPENE)
1 Propeller proto board enclosure
2 XBees
1 Parallax Wheel Kit (won at last year's UPENE, thanks again)
2 Parallax HB-25 Motor Controllers
Servos and Servo Brackets from Lyxmotion
Wireless camera
Video: Nuntius the Garden Avenger vs. The Weed!!!
http://www.youtube.com/watch?v=RnZ_UmJkjqs
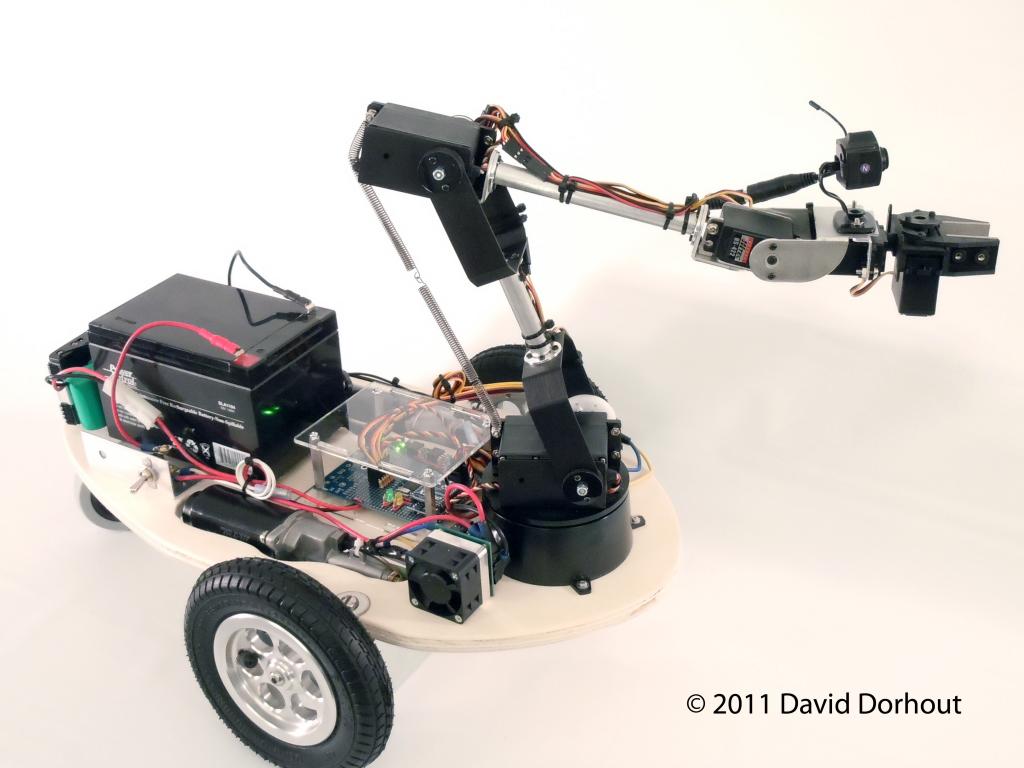
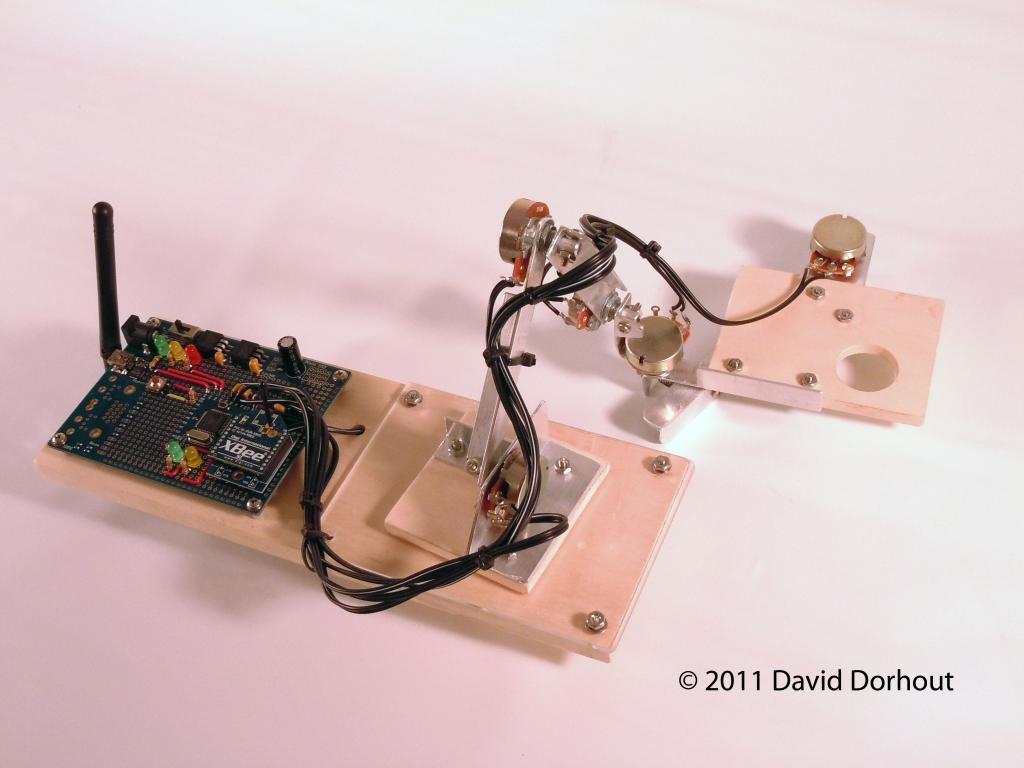

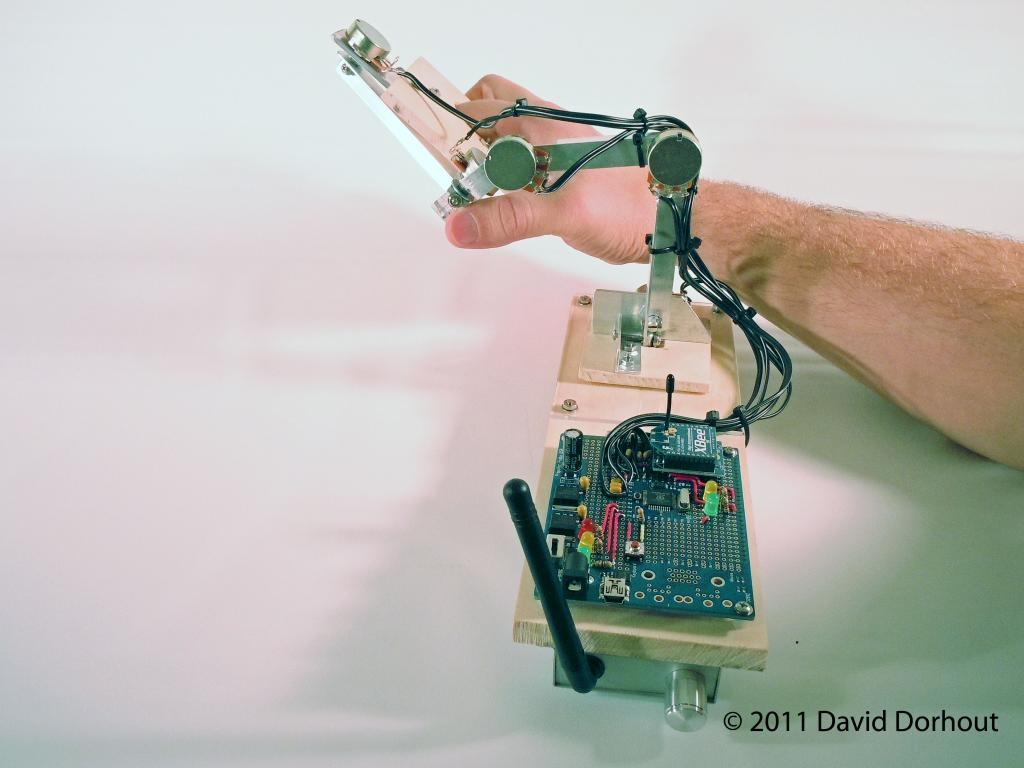

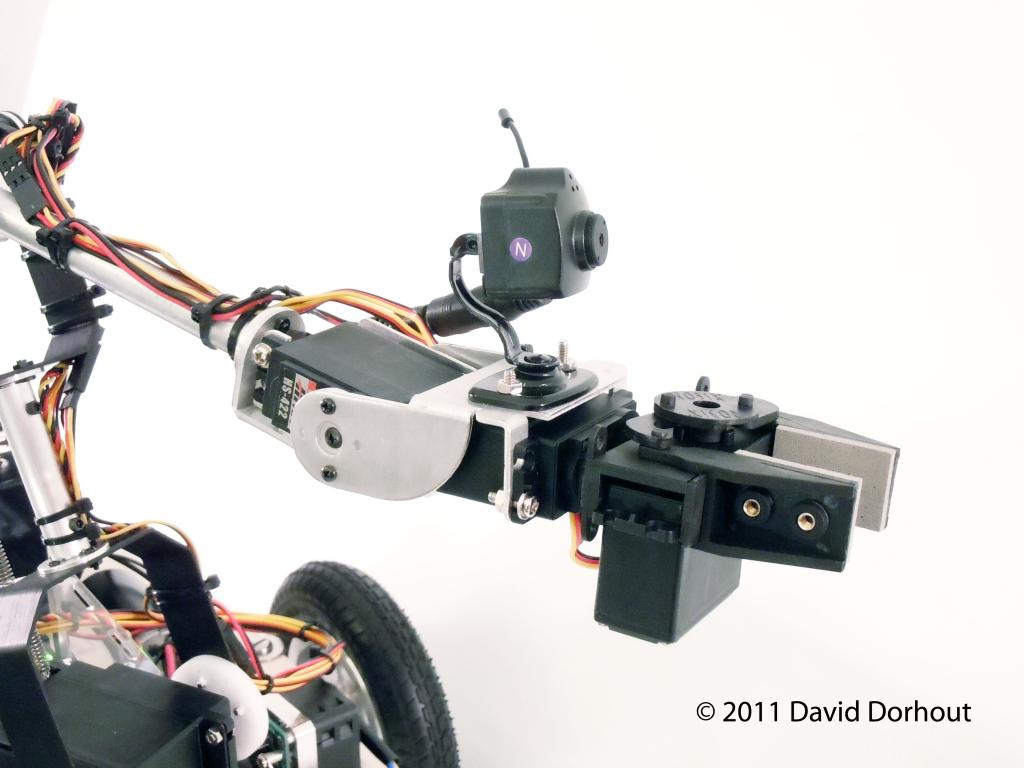
Nuntius is based on the same basic concept of those systems except it's a robot. The controller is a biomechanical input device that consists of a propeller proto board that measures the position of a 5 axis + gripper "mini arm" that you articulate with your hand, just like you would if you were actually there. The propeller then send the data via a XBEE to the robot. The result is that the big arm on the robot mirrors the mini arm and you control the robot by looking through a wireless camera that's attached to the gripper. The movement of the robot is proportional to the direction and how far the arm is extended (or pulled back for reverse). The further the arm is extended, the faster it goes in that direction. The robot only moves while you're holding down a button on the proto board. This allows you to drive the robot around and then stop and examine something with just a button and the mini arm. You just plug it in and do whatever... weed the lawn, weed the garden, weed the driveway, take the dog for a walk... from the safety and comfort of your couch.
Dave
Major components:
2 Propeller proto boards (from last year's UPEC & UPENE)
1 Propeller proto board enclosure
2 XBees
1 Parallax Wheel Kit (won at last year's UPENE, thanks again)
2 Parallax HB-25 Motor Controllers
Servos and Servo Brackets from Lyxmotion
Wireless camera
Video: Nuntius the Garden Avenger vs. The Weed!!!
http://www.youtube.com/watch?v=RnZ_UmJkjqs
1024 x 768 - 57K

1024 x 768 - 62K

1024 x 768 - 68K

1024 x 768 - 59K

1024 x 768 - 65K

1024 x 768 - 65K
Comments
That is sooo cool!
I love your controller. Amazing.
Man, I'll go to any UPE if can win a set of those motors and wheels.
Another super amazing robot.
Thank you very much for taking time to document it.
Duane
Congratulations! Give us more details , images and videos!
Nice work! Very professional indeed!
Are those 1/4 scale servos in the robotic arm except for the gripper?
Regards,
TCIII
Well done, Dave. I want to know how easy/hard/dizzying it is to operate that arm with the camera mounted out on the arm. If ever you needed image stabilization, it's there!
Maybe a second cam on the base on a pan & tilt head... as long as I'm dreaming. Fantastic job.
Hey thanks. I'd like to do this kind of thing full time some day. I have some kind of dry demonstration videos and I was working on shooting a "fun" video outside today, but a big drop of sweet hit the prop chip and... nothing, so I'll have to order another board before I can complete the cool video, but I should be able to put up the others after this coming weekend. (I really need to switch to socketed stuff...)
Ya, I diffidently recommend going to a UPE. They're a ton of fun.
Yip, they're both on 2.4ghz. They don't seem to mind each other too much. The camera that I bought was only ~$28 from Amazon and you have to tune the video receiver with the knob on the side. But!, the way the picture tunes in, it makes you feel like you're in one of those old 80's movies like the "Abyss", or "Aliens."
I haven't really tried to see how far it can go so far. Hopefully I'll be able to test it some more once I replace the prop board.
All of the brackets, base, gripper, and 1/4 scale servos are from Lynxmotion. They have great hardware.
I haven't really been able to drive it too much. There are some fancier wireless camera system (Servo city sells one) where you can have up to four cameras tied to one receiver and then flip between them, but those systems cost a couple of hundred dollars. I thought that you's also appreciate the plywood base. It's 5 ply birch plywood.
Thanks for the questions and the encouragement. I'll try and post the videos that I have, but it will probably be a week or so. Let me know if you have any other questions.
http://www.youtube.com/watch?v=RnZ_UmJkjqs
Ron
http://www.gadgetgangster.com/news/51/447
OBC
I just ordered those motors and after watching the video, I'm wondering if that was full speed/pulse at any point ?
Your right. The servos and the wheel moters are operating quite a bit slower than their max speed. I'm using the ramping feature in Servo_32_7 from the object exchange. It's a great object. What are you planning to build? You'll have to post it while/once it's done.
Dave
The CMUcam is needed to detect color and distance, relay info to another system for data entry.
I saw the general forum for questions but could not figure out how to start a thread. Any help is greatly appreciated.
Thanks,
Dee
Dave