

RoboProp - advanced Propeller based controller, fits BOE-BOT chassis (in Sep. Servo!)
 Bill Henning
Posts: 6,445
Bill Henning
Posts: 6,445
Hi!
I have not posted much in the Robotics forum, but I have been lurking here for quite a while; and now I hope to become a regular here.
I've made a number of small bots in the past, and some time ago I decided to design a robot controller that was very powerful, easy to use, and incorporated the features I wanted for my bots... and I named it RoboProp.
Features:
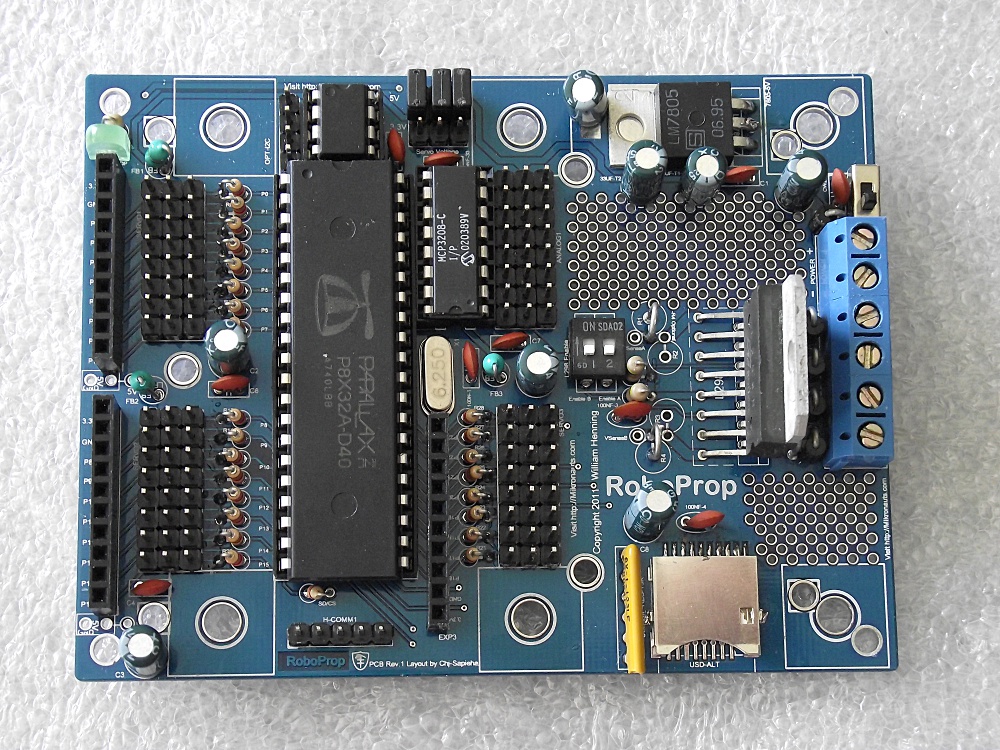
- 4.000"x3.050" standard form factor with standard mounting hole pattern
- Designed to fit onto BOE-BOT as an upgrade
- 100MHz Parallax Propeller processor with eight 32 bit cores
- 64KB EEPROM
- uSD for data logging and program storage
- L298 full H-bridge driver with 2.5A drive per motor (3A peak)
- optional current sense resistors
- 8 channel / 12 bit ADC for 3-pin 5V sensors (MCP3208)
- up to 24 channels for servos or digital inputs
- Mikronauts I2C connector for upcoming Mikronauts I2C modules
- HCOMM connector for programming via Propeller Plug, or Mikronauts SerPlug
- EXP connectors for breadboards and Mikronauts modules
- can use FlexMem for SRAM/FLASH/FRAM/MRAM memory expansion (uses 6-8 I/O pins)
- can add upcoming MCP3208 module for an additional 8 analog input channels (uses 4 I/O pins)
- can stack on other Mikronauts CPU boards and breadboards with stacking headers for EXP1/EXP2
- two small high-density prototype areas
- screw terminals for Vin/GND, MotorA, MotorB
- on-board 5V and 3.3V regulation
- RoboPropDiag diagnostic software for testing and exercising ADC/SERVO/L298 features included
- uses OBEX objects for pwm, servos and ADC
- fsrw26 modified for RoboProp's uSD settings included
- extra mounting holes for sensors and other platforms
Notes:
- four servo / IO channels are shared with the L298 motor driver
- four servo / IO channels are shared with the uSD socket
Videos:
I've started making and uploading videos of RoboProp controlled robots, and RoboProp's Lidar display to my YouTube channel.
Lidar Demo: http://youtu.be/pHtKChSSW9I
"Marco" robot video: http://youtu.be/1lzAL_2xpIo
June 2: Added 3 photos of Marco in message #26
Pricing:
Kits:
$99.00USD+s/h - RoboProp Full Kit - DC motor edition (includes L298 H-Bridge and related parts)
$89.00USD+s/h - RoboProp Full Kit - Continuous rotation servo edition (does NOT include L298 H-Bridge and related parts)
Assembled & Tested:
$149.00USD+s/h - RoboProp - DC motor edition (includes L298 H-Bridge and related parts)
$139.00USD+s/h - RoboProp - Continuous rotation servo edition (does NOT include L298 H-Bridge and related parts)
Now available from Mikronauts, please email me at "mikronauts at gmail dot com" with your address for a quote including shipping and handling.
* distributors to be announced at a later date
I have not posted much in the Robotics forum, but I have been lurking here for quite a while; and now I hope to become a regular here.
I've made a number of small bots in the past, and some time ago I decided to design a robot controller that was very powerful, easy to use, and incorporated the features I wanted for my bots... and I named it RoboProp.
Features:
- 4.000"x3.050" standard form factor with standard mounting hole pattern
- Designed to fit onto BOE-BOT as an upgrade
- 100MHz Parallax Propeller processor with eight 32 bit cores
- 64KB EEPROM
- uSD for data logging and program storage
- L298 full H-bridge driver with 2.5A drive per motor (3A peak)
- optional current sense resistors
- 8 channel / 12 bit ADC for 3-pin 5V sensors (MCP3208)
- up to 24 channels for servos or digital inputs
- Mikronauts I2C connector for upcoming Mikronauts I2C modules
- HCOMM connector for programming via Propeller Plug, or Mikronauts SerPlug
- EXP connectors for breadboards and Mikronauts modules
- can use FlexMem for SRAM/FLASH/FRAM/MRAM memory expansion (uses 6-8 I/O pins)
- can add upcoming MCP3208 module for an additional 8 analog input channels (uses 4 I/O pins)
- can stack on other Mikronauts CPU boards and breadboards with stacking headers for EXP1/EXP2
- two small high-density prototype areas
- screw terminals for Vin/GND, MotorA, MotorB
- on-board 5V and 3.3V regulation
- RoboPropDiag diagnostic software for testing and exercising ADC/SERVO/L298 features included
- uses OBEX objects for pwm, servos and ADC
- fsrw26 modified for RoboProp's uSD settings included
- extra mounting holes for sensors and other platforms
Notes:
- four servo / IO channels are shared with the L298 motor driver
- four servo / IO channels are shared with the uSD socket
Videos:
I've started making and uploading videos of RoboProp controlled robots, and RoboProp's Lidar display to my YouTube channel.
Lidar Demo: http://youtu.be/pHtKChSSW9I
"Marco" robot video: http://youtu.be/1lzAL_2xpIo
June 2: Added 3 photos of Marco in message #26
Pricing:
Kits:
$99.00USD+s/h - RoboProp Full Kit - DC motor edition (includes L298 H-Bridge and related parts)
$89.00USD+s/h - RoboProp Full Kit - Continuous rotation servo edition (does NOT include L298 H-Bridge and related parts)
Assembled & Tested:
$149.00USD+s/h - RoboProp - DC motor edition (includes L298 H-Bridge and related parts)
$139.00USD+s/h - RoboProp - Continuous rotation servo edition (does NOT include L298 H-Bridge and related parts)
Now available from Mikronauts, please email me at "mikronauts at gmail dot com" with your address for a quote including shipping and handling.
* distributors to be announced at a later date
1000 x 750 - 405K
1000 x 750 - 263K
1000 x 750 - 231K
1000 x 750 - 265K
1000 x 750 - 211K
1000 x 750 - 269K
1000 x 750 - 258K
1000 x 750 - 316K
1000 x 750 - 289K

Comments
How are the Holes laid out in that Prototyping area? or is that a Prototyping area?
Hope You enjoy UPEW, I enjoyed the show very much last Year.
I do Wish I could be there to see it live and in person.
-Tommy
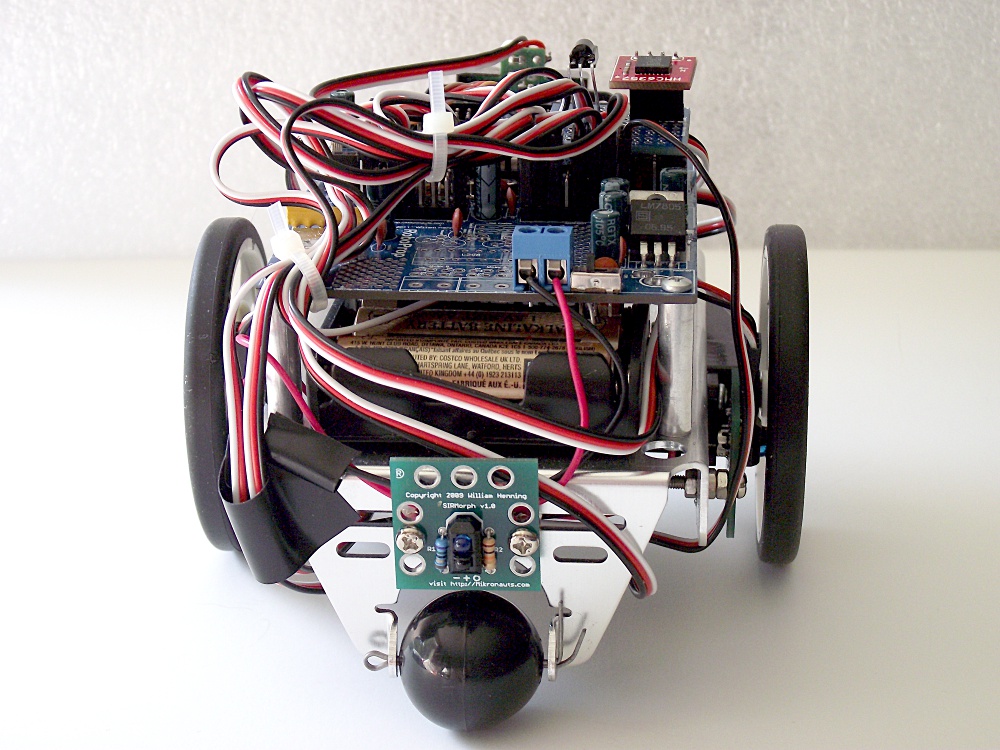
It was fun designing RoboProp, and I am having a blast trying it out on various bots. I am actually assembling a partially populated RoboProp more suitable for my BOE-BOT right now; I will leave off the 5V regulator and the L298 motor driver circuit, and I will drive the servo's directly off the 4AA calls in BOE-BOT's belly, regulating it down to 3.3V for the Propeller.
Too bad you can't make it this year - hopefully you will will be able to make it next year.
I am sure there will be webcasts of UPEW and the talks again this year.
The holes in the two small prototyping areas are large enough for 2 - 3 wires per hole, and consist of two 100mil grids, interleaved with a 50 mil horizontal/vertical offset, giving basically twice the hole density of a regular 100mil rectangular pattern.
Regards,
Bill
So I am afraid that the Fuel Costs alone, are out of My skill range this Year, and Probably Most of next Year too. Oh well, all part of the fun, I guess.
I look forward to the Webcasts, They had one last year, That was My Tshirt You saw backed up against the camera for five minutes... Heh,sorry about that Bean.
Hopefully the Camera will be out of My reach next time.. Say, Bill, Maybe You could hold Your new Controller in front of the Camera for a few minutes...
-Tommy
I am planning to make videos after UPEW about the new products for my YouTube channel - including RoboProp demos :-)
The RoboProp looks good!
I was wondering, are there
flyback-protection diodes
for the L298 on the board?
(I couldn't see any in the
pictures.)
Thanks
Hi XNOR,
Thank you!
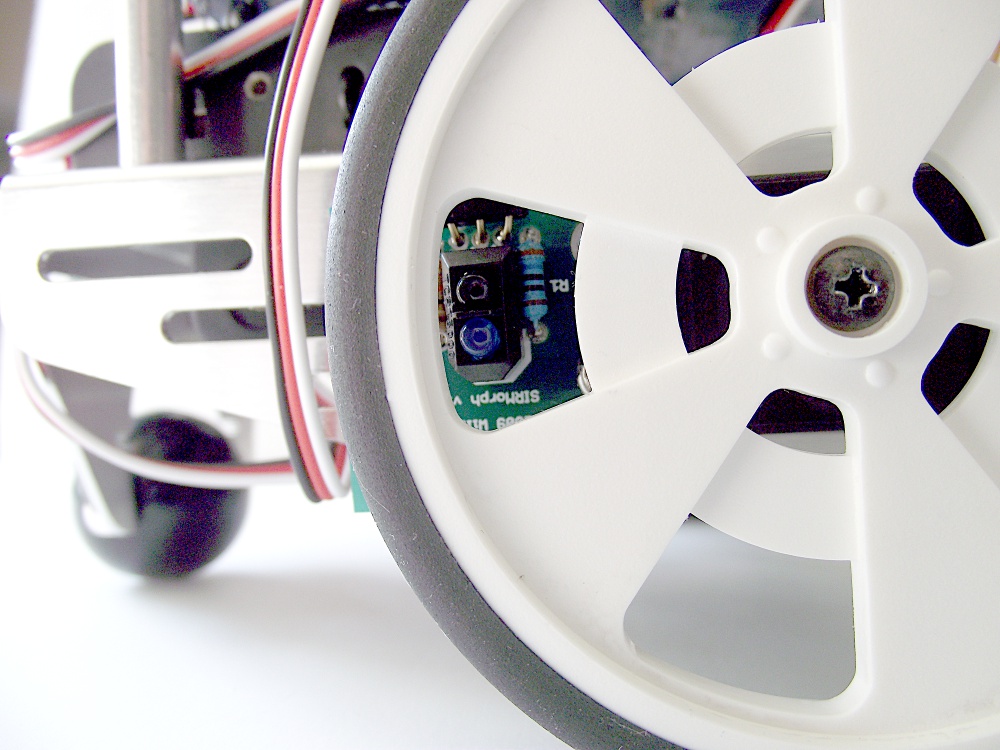
RoboProp has eight 1N5818 Schottky diodes for protection, squeezed into the space between the back of the L298 and the screw terminals for MOTOR-A and MOTOR-B
If you take a close look at the side shots, you can see a bit of them.
You can even install optional resistors or shunts in order to be able to measure the motor driver current for each motor!
Thanks,
Bill
That I can answer.
Holes on that small prototyping area's are NOT bused.
To be possible to use in any configuration.
-Tommy
If you need even more prototyping space, RoboProp is part of the Mikronauts system, so there are several prototyping boards that can stack on top of RoboProp - or RoboProp can stack on top of other boards!
Some examples:
Proteus 4.000"x3.050" (same as RoboProp,)
miniPro 2.700"x1.150"
ppBridge 2.800"x2.500"
There will be more prototyping boards for the system soon :-)
This looks great! I look forward to hearing more...
I built three more RoboProp's today (for a total of 4 running boards) so I can start upgrading my bots.
I built one of them without the 5V regulator or L298 section so I can experiment with running off just 4xAA - otherwise I need to upgrade the BoeBot's power supply as well.
The good news:
- the plan worked reasonably well, RoboProp ran off 4xAA's, servo's were fine, prop was fine, eepropm and uSD too..
The bad news:
- the ADC was very noisy running off batteries (as I expected); if I give up on high sampling rates I can add a filter cap to all eight channels simply by tack soldering it on the bottom
More experimentation is required... worst case, I put a higher voltage battery pack on my BoeBot.
I'll be bringing RoboProp to UPEW...
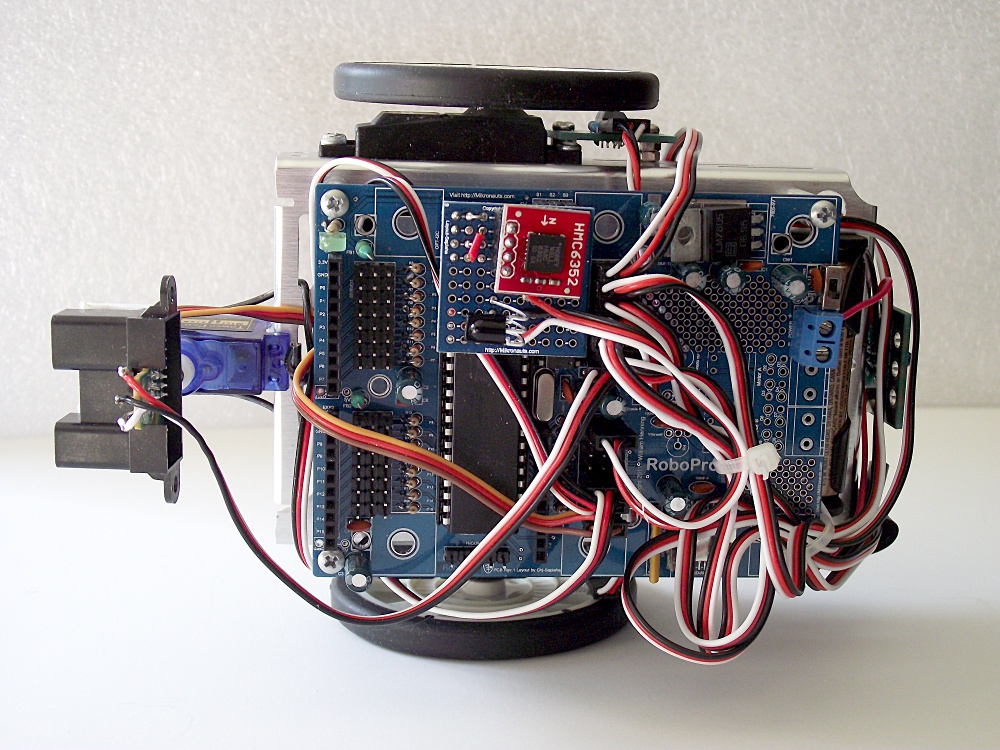
That is a nice looking board! It is nice to see that you used the DIP version of the EEPROM chip. With that format it should work with my EEPROM bank switch adapter:
http://forums.parallax.com/showthread.php?126798-NEW-EEPROM-expansion-%28bank-switch-adapter%29
With that you can have completely different programs loaded in each EEPROM and switch between them to have the robot run a completely different program.
Robert
So far, I've always used DIP eeproms, so your adapter should work on most of my boards as long as the legs on your board lift it high enough to clear other nearby components
I'm back from UPEW, where as far as I could tell, everyone liked RoboProp!
I will be posting some photos this week, and I hope to make some 720p videos for my YouTube channel this weekend. To whet your appetites, I thought I'd post a summary of what I showed on the robots I took to UPEW.
Meet my robotic friends:
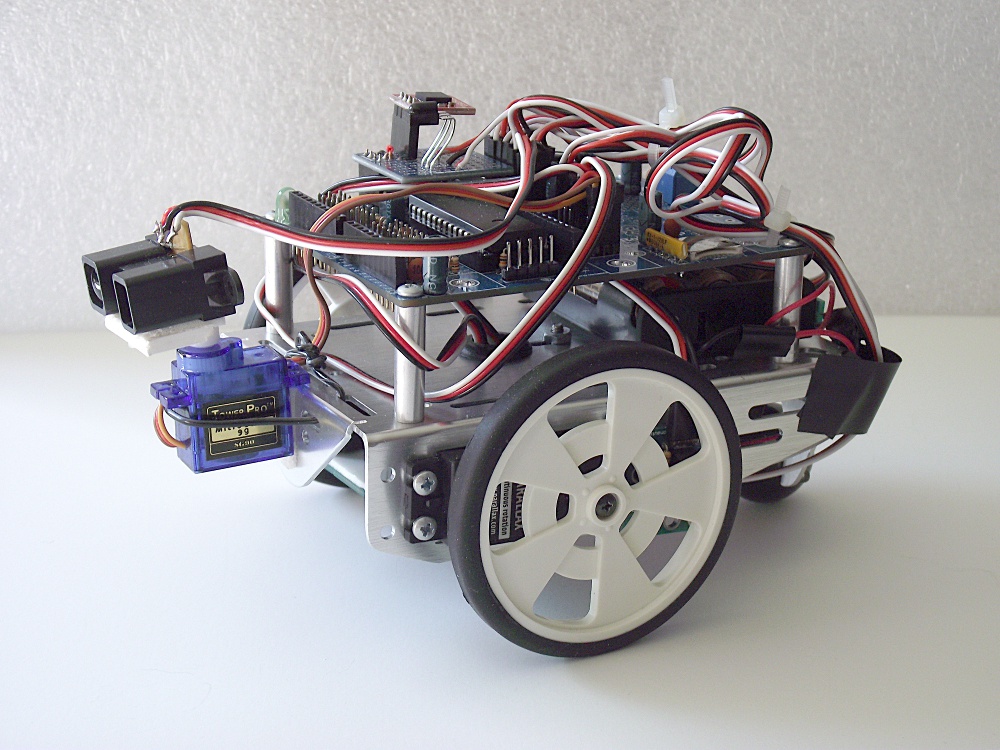
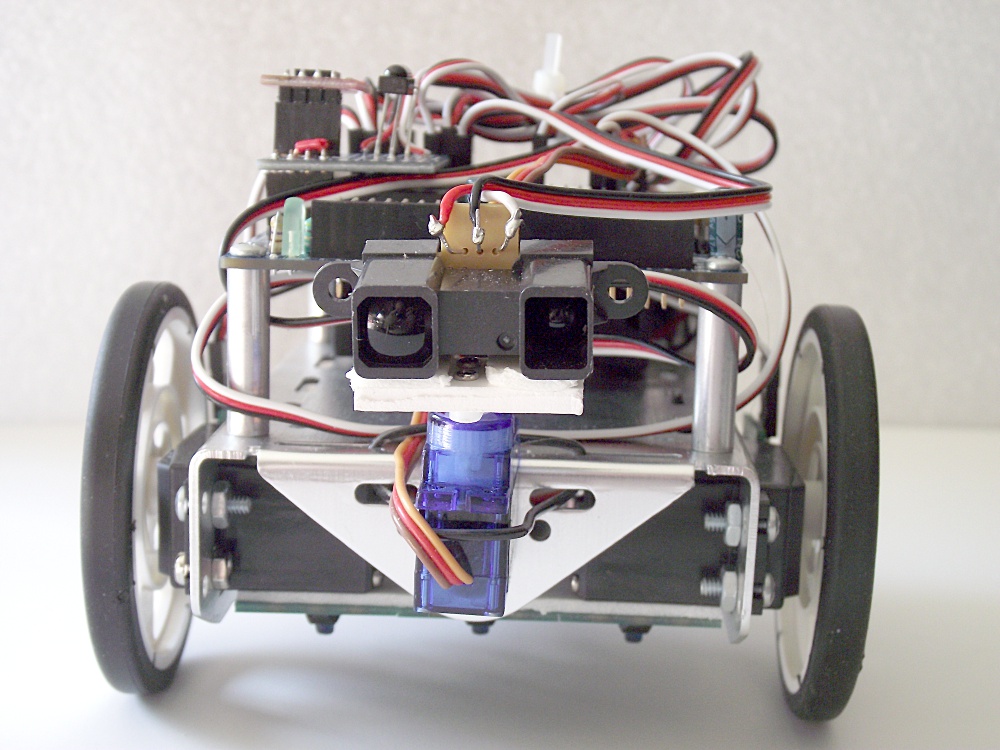
Tracked robot "Marco":
- Rover 5 dual motor / dual encoder tracked chassis
- RoboProp, fully populated
- uses RoboProp's on-board dual H-Bridge driver to drive the Rover 5's DC gear motors
- added 1.1" square prototype board with HMC6352 compass module and 38Khz IR receiver
- added 3mm thick hand cut Sintar "deck"
- added single SirMorph sensor board (short range IR distance receiver) as a rear "virtual bumper"
- added three SirMorph sensors on the bottom for use as a line following sensor
- pan/tilt mount with two small servos for Sharp distance sensor based LIDAR
- NTSC/PAL video output module (uses 3 Propeller/servo pins) to a very early version of my RoboProp firmware (more later)
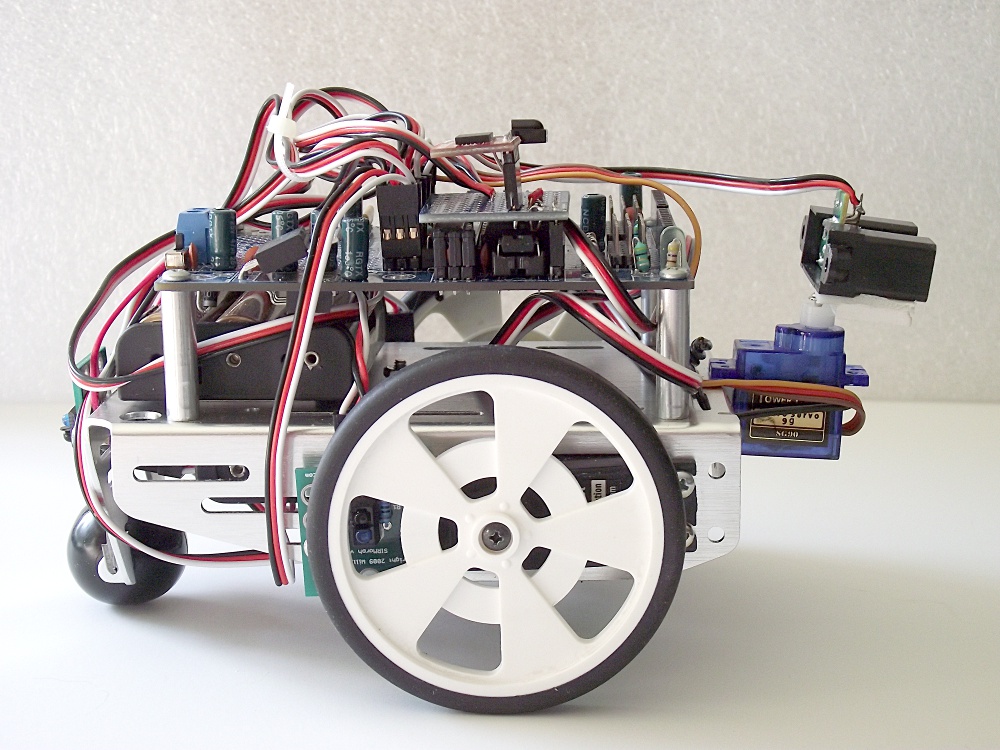
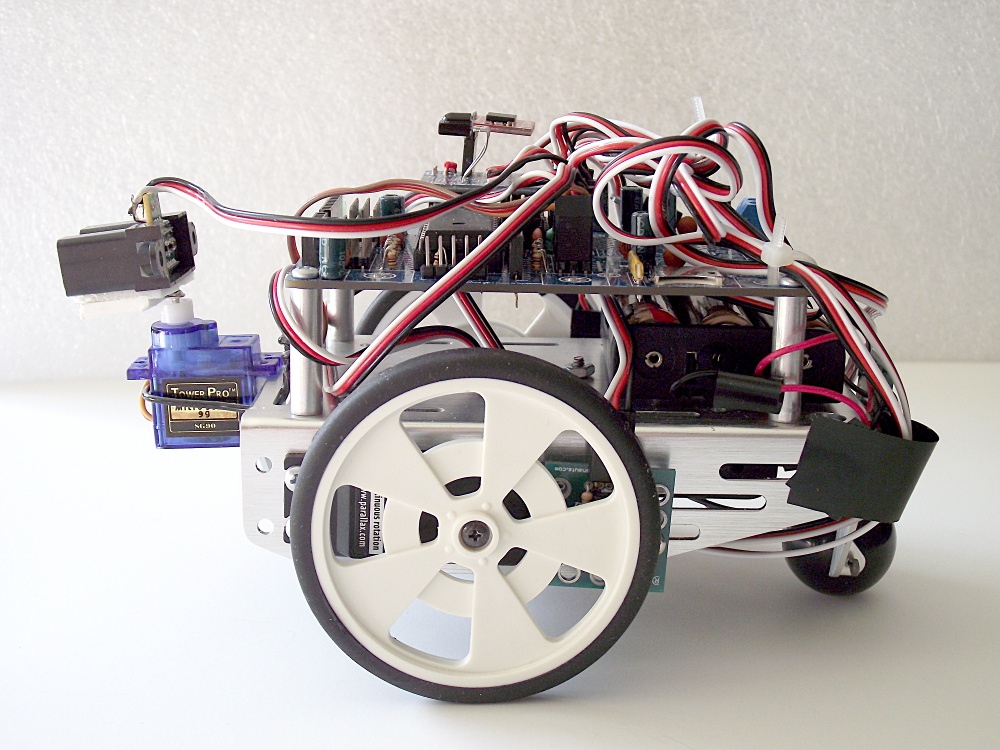
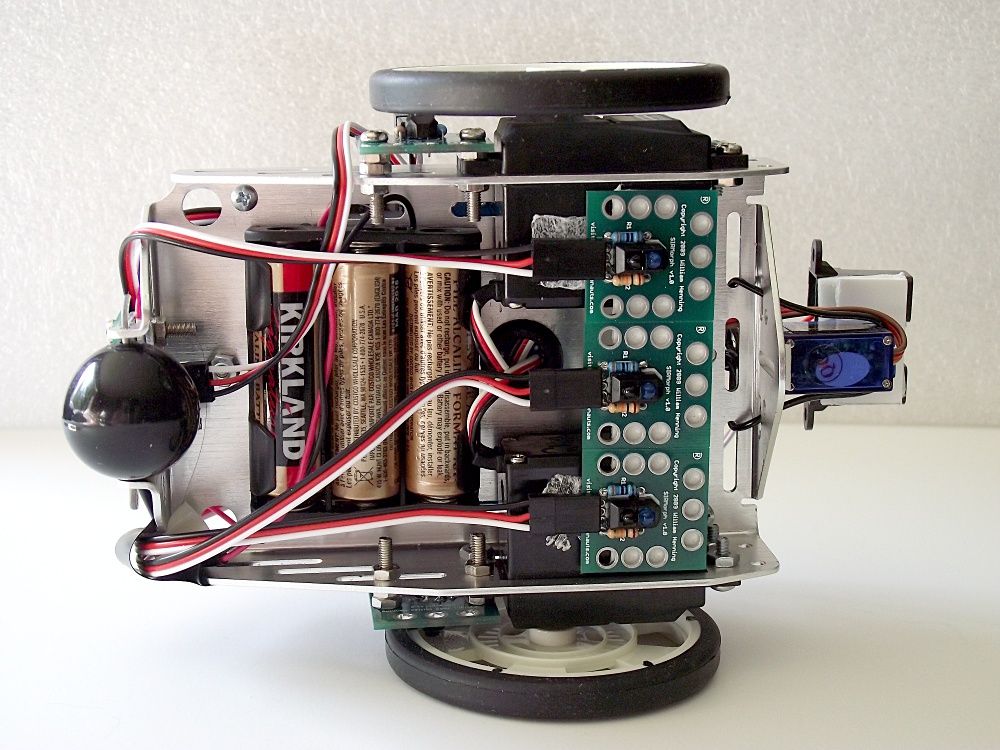
Wheeled robot "Pollo":
- Boe-Bot chassis
- replaced 4x AA battery holder with dual 3x AA holders for more power
- RoboProp fully populated with the exception of the dual H-Bridge driver and related parts
- the Parallax continuous servos that came with my Boe-Bot chassis
- white Solarbotics "Futaba/Parallax" servo wheels (needed for my wheel encoders, they do not match the standard Parallax wheels)
- added two SirMorph sensor boards (they are designed to mount on Futaba/Parallax servos for use as wheel encoders / virtual side bumpers)
- added 1.1" square prototype board with HMC6352 compass module and 38Khz IR receiver
- added single SirMorph sensor board (short range IR distance receiver) as a rear "virtual bumper"
- added three SirMorph sensors on the bottom for use as a line following sensor
- pan mount with a small servo for Sharp distance sensor based LIDAR
- NTSC/PAL video output module (uses 3 Propeller/servo pins) to a very early version of my RoboProp firmware (more later)
Tracked robot "Hilo":
- same as "Marco" except only pan (no tilt) LIDAR head
- unfortunately Hilo developed a mechanical malfunction with one of the drive motors during shipping :-( and sat out the show, sometimes LIDAR scanning forlornly...
I did the first talk (the video from UPEW should be on-line somewhere on the Parallax site soon, I will post the link when available) and of course, Murphy HAD to show up - poor Hilo!
Fortunately, as I forgot to pack one of my NTSC to VGA converters, a kind gentleman attending UPEW had one with him and loaned it to me for the demo (thank you!!!! I apologize for not remembering your name).
The crowd liked the demo of my new firmware (that will come with RoboProp) that has a nice LIDAR display that looks like a 180' radar display and shows compass heading. As soon as I finish the code, the virtual bumpers, line sensors, motor drive type, speed, RPM's (taken from encoder information), battery voltage, etc. will be updating. I'll find one of my NTSC video grabbers and grab some LIDAR / telemetry display video to my YouTube channel as well.
Later, I drove Marco around using a cheap Radio Shack 38Khz IR remote programmed for one of three Sony codes (each robot has his own unique "TV" code).
Now I will start writing the documentation including the BOM, figure out MSRP for RoboProp, work on finishing the firmware, polishing the diagnostics software, taking pics and videos ... I am going to be busy for a while.
Unfortunately my radio telemetry software was not ready in time for UPEW :-(
Feel free to ask any questions! I'll check this thread a couple of times each day for questions or comments.
p.s.
How many other bot controllers can take small/cheap video and other expansion modules from an existing product line? :-)
I added pricing to the first post, but I will repeat it here to save you scrolling up. I will be uploading a PDF version of the BOM to the downloads page of my site after I add a product page for RoboProp.
Pricing:
Kits:
$99.00USD+s/h - RoboProp Full Kit - DC motor edition (includes L298 H-Bridge and related parts)
$89.00USD+s/h - RoboProp Full Kit - Continuous rotation servo edition (does NOT include L298 H-Bridge and related parts)
Assembled & Tested:
$149.00USD+s/h - RoboProp - DC motor edition (includes L298 H-Bridge and related parts)
$139.00USD+s/h - RoboProp - Continuous rotation servo edition (does NOT include L298 H-Bridge and related parts)
Introductory offer: 10% off the MSRP (but not the s/h) on the first ten RoboProp's (kit or assembled) sold
Now available from Mikronauts, please email me at "mikronauts at gmail dot com" with your address for a quote including shipping and handling.
* distributors to be announced at a later date
How full are the full kits? Chassis and all, or just the board and components?
Either way, I thnk I'll be getting one... or two, lol
MG117
Thank you for your kind words!
The "Full Kit" is the one with the optional dual H-Bridgee controller for $99+s/h ... however if you don't need the H-Bridge, you can save $10.
I am afraid you will have to get a chasses of your own... The chassis kit I got locally was "Robotics with the Boe-Bot Parts Kit", then I upgraded it with some goodies
You could save a bit of money buy just getting the chassis, ball wheel, and two continous rotation servo's from Parallax, but its only a bucks more for the kit I used.
In a few days I'll post pics (and video on my YouTube channel) of the other chassis I brought to UPEW .. the two wheel tracked Rover 5. I had to cut a Styrene "deck" for that one (it's a bigger bot) and it needs the H-Bridge for its gear motors, but it has nice encoders (1000 pulses per 3 revs) on it.
Regards,
Bill
I just added two new shots to the photo's in the first post; one of an assembled RoboProp board (from above), and a right side view of the completed robot.
I will be adding more photos to this thread
Update: added new front shot
I removed the old shots, and posted 9 shots today.
One is a top view of the assembled & tested full kit, including the L298 dual H-Bridge controller.
The other eight are shots of my much-upgraded "Pollo" robot (also called Mateo), which was a Boe-Bot before I added RoboProp, and a lot of other goodies..
Note: the compass module is 90' off north, I compensated in software (has to do with orientation of the header on the board); and the return trip bent it slightly; I will have to re-calibrate.
Tomorrow I think I'll take photo's of "Marco" - Mateo's big brother.
(Marco, Pollo (Mateo) and Hilo are my three young nephew's)
Or maybe I will take some HD video of Marco in action and post it on my YouTube channel...
I've added a couple of videos on my YouTube channel:
Lidar display demo:
http://youtu.be/pHtKChSSW9I
"Marco" the RoboProp based robot:
http://youtu.be/1lzAL_2xpIo
I hope you like them!
I will keep adding videos to my channel.
I will be adding more photos and videos as I have time to make them!
A couple quick questions:
Will you and/or these boards be showing up at UPEC or UPENE?
Do you plan to sell bare boards or just the kit/assembled versions?
Sorry, I will not be going to UPEC or UPENE, and neither are the distributors I have so far.
I am not planning to advertise, distribute or sell a bare board (or essentials kit),
however forum regulars are welcome to PM/email me, and I can sell them an "Essentials" kit (pcb, 6.25Mhz xtal, uSD socket I use) direct - all other parts are readily available at DigiKey.
(My firmware assumes uSD and 100Mhz)
Ken was the first to find it :-)
and he posted about it at http://forums.parallax.com/showthread.php?133818-Thank-you-to-Bill-Henning-for-the-quot-Upgrading-the-Boe-Bot-quot-article-with-RoboProp!
I have added a jpeg of the cover shot to the front page of my site, and to the thread above... you can get the magazine on a news stand near you, or by subscribing to the digital edition.
Gordon McComb also has yet another great article in that issue!
Thanks for mentioning my little contrib. It runs five parts, culminating in demonstrating control using the Propeller.
RoboProp looks pretty nifty. I especially like the outrigger IR bumpers.
-- Gordon
I like your "little" series... nice small platform, with a readily available Tamiya dual gearbox and wheels!
I will be ordering a couple of them today, along with some more of your PVC materials
Bill