

New Propeller ROV
 Jay Kickliter
Posts: 446
Jay Kickliter
Posts: 446
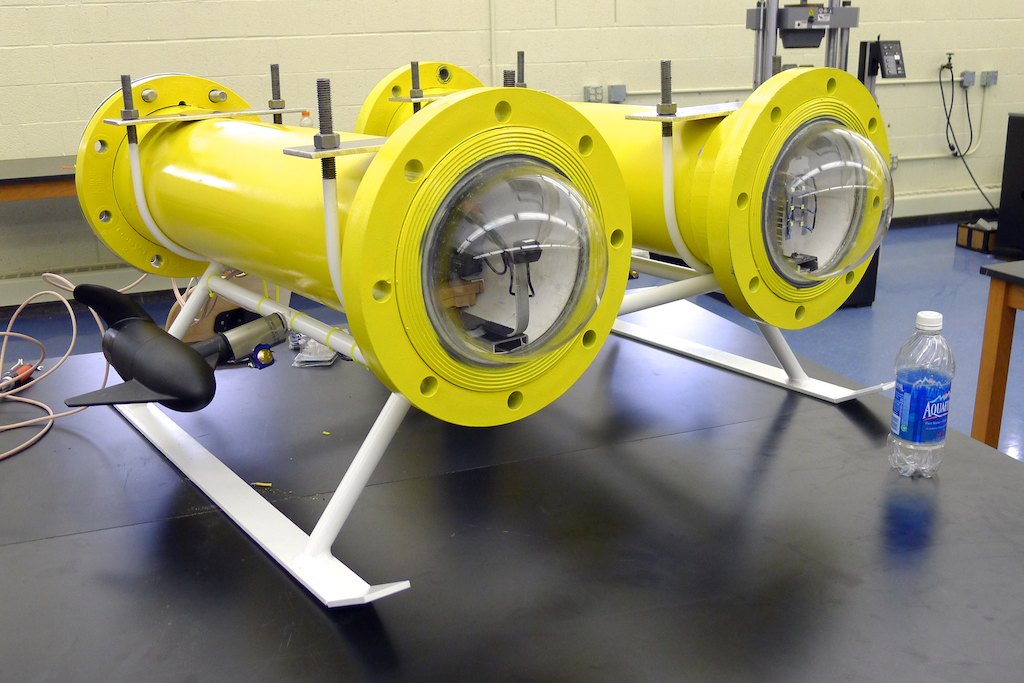
Some friends and I have been working on a Propeller powered ROV for the last couple months. We just did our first pool test this morning, and it worked. We'll be posting more details, photos, and videos later, but I'll just leave this image for now.


Details:
* 3 Minn Kota 12V trolling motors
* 8" PVC pods
* 4 lead acid batteries
* video and lights (not yet working)
* using the top joystick on a wii nunchuck controller for differential thrust (works very well)
* using the c and z buttons on the nunchuck for vertical impulse thrust
* weighs a bit over 200 lbs
Details:
* 3 Minn Kota 12V trolling motors
* 8" PVC pods
* 4 lead acid batteries
* video and lights (not yet working)
* using the top joystick on a wii nunchuck controller for differential thrust (works very well)
* using the c and z buttons on the nunchuck for vertical impulse thrust
* weighs a bit over 200 lbs

Comments
2. What maximum depth do you anticipate?
3. What method did you finally settle on for sending video over the CAT5?
-Phil
Thanks.
1. I'm not sure what the acrylic domes were meant for. I just ordered the cheapest ones I could find that were around the right size.
2. As it is now, it can only go down one atmostphere, or around 30 feet. That's what the trolling motors are rated for. To go deeper, we'd have to add pressure compensation.
3. Well, nothing at the moment. We only have a 60' umbilical, and the video came with a 60' cable, so I'm hoping it will work. But I wont know if it does until when we present to the school's Admiral tomorrow.
Hopefully, some students can pick up this project in coming years, since most of the guys working on it are graduating in a week, and I only have another semester left next year. It's bit advanced for our school, so we're going to have to document it well, and of course we'll release all the documentation. But, I'm leaving for sea next monday, so it'll probably have to wait.
Propellers take to water like ......well, like Arduino's to Installation Art......
This is inspiring!
Rick
The only thing that remans to be seen is if it will be difficult to control from video only, since the camera is in the starboard pod and the lights in the other. But I can drive a car while offset, so it should be doable.
I was in the pool checking for leaks tangles, so I didn't get to drive it. But the guys said it was very responsive and easy to control. I set up simple differential drive for the thrusters, and made it have exponential response to smooth things out near the zero point. I couldn't my code worked on the first run, and definitely wasn't expecting to work well. The only problem I noticed was that the motors occasionally turned without any input. My only guess is that the 9V battery I had hooked up to the dry side controller was running down, or maybe some noise got injected somewhere.
Hope you get to post the videos before you ship out!
Jim
Good luck with it :-)
http://www.lynxbroadband.com/PDFs/Bobcat%20Literature-Audio%20and%20Video%20on%20Twisted%20Pair.pdf
Canford has also some compact
(balun = balanced to unbalanced audio)
http://www.canford.co.uk/Products/2006022/28-7027_MUXLAB-500027-Stereo-audio-balun
Jim
On the video issue, if you use double the signal in the CAT5, by having a duplicate of the positive voltage in negative, it should not cause as much interference, also if using the same cable for both video and serial, place your Vss, and Vcc lines between serial lines and video lines.
-Phil
http://www.youtube.com/watch?v=en5TCSHZDyY
Jim